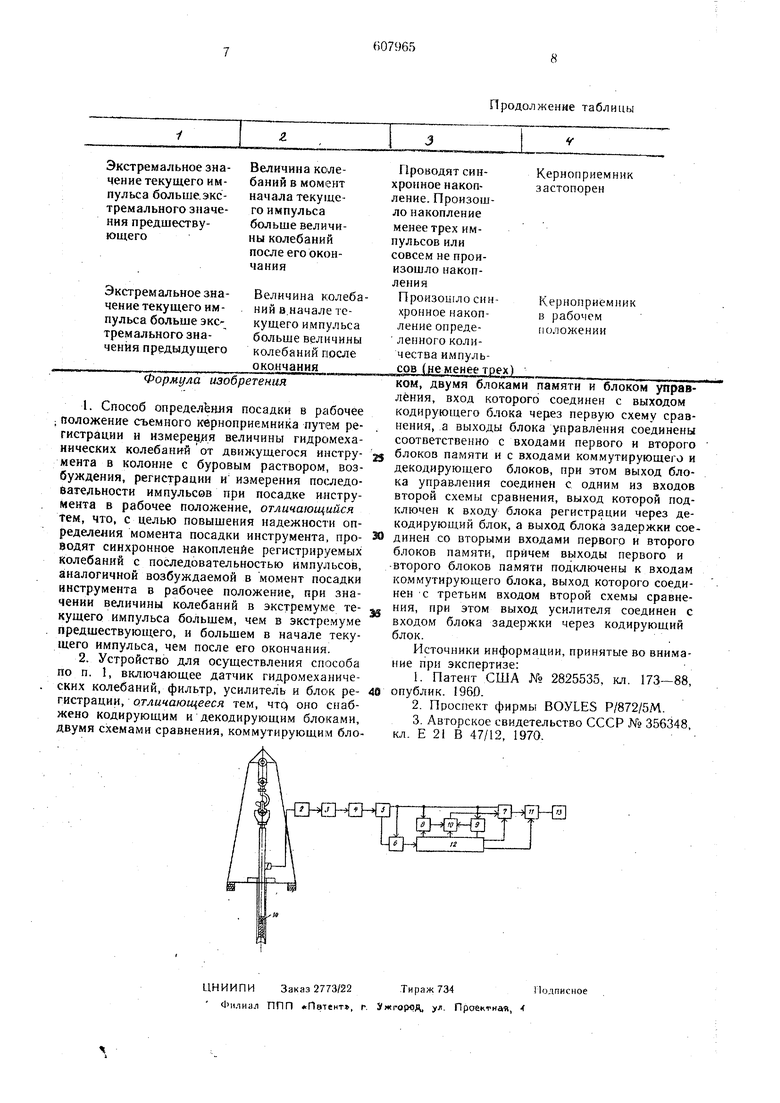
(54) СПОСОБ ОПРЕДЕЛЕНИЯ ПОСАДКИ В РАБОЧЕЕ ПОЛОЖЕНИЕ СЪЕМНОГО КЕРНОПРИЕМНИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ 36 механических колебаний от движущегося инструмента в колонне с буровым раствором, возбуждения, регистрации и изменения последовательности импульсов при посадке инструмента в рабочее положение (3|. Такой способ реализуется с помощью устройства для приема информации с забоя скважин по гидравлической линии связи, которое содержит датчики гидромеханического давления и скоростного напора, подключенные через фильтр и усилитель к сумматору, и частотомер с показывающим и регистрирующим приборами. Однако известный способ и реализующее его устройство не позволяют избирательно оценивать положение в колонне бурового инструмента, поскольку при движении бурового инструмента в колонне возникают естественные гидромеханические импульсы, обусловленные изменением скорости движения, торможением, ударами инструмента о стыки бурильно11 колонны, а также происходит уменьшение среднего уровня гидромеханических колебаний по мере перемещения бурового инструмента к забою. В это время регистрируется частота следования импульсов, в общем случае отличная от задан-. кой для гидрогенератора. При равномерном движении бурового инструмента и после его остановки в результате его стопорения гидромеханические импульсы не возбуждаются и, следовательно, эти состояния при данном способе получения информации равнозначны. Кроме того, в .момент посадки в рабочее положение возникает естественный гидромеханический импульс всегда большей интенсивности, чем предшествующий, и средний уровень гидромеханических колебаний становится минимальным. С увеличением длины бурильной колонны информационный сигнал затухает и уровень колебаний, принимаемых на поверхности, может стать соизмеримь1м с величиной помехи, возникающей при движении промывочной жидкости по бурильной колонне, микросейм. В результате воздействия помехи регистрируемая частота может отличаться от частоты импульсов, генернруемых гидропередатчиком, что резко снижает надежность определения момента посадки спускаемого бурового инструмента в рабочее положение. Целью изобретения является повыщение надежности определения момента посадки инструмента в рабочее положение. Это достигается тем, что проводят синхронное накопление регистрируемых гидромеханических колебаний с последовательностью импульсов, аналогичной возбуждаемой в момент посадки инструмента в рабочее положение, при значении величины колебаний в экстремуме текущего импульса большем, чем в экстремуме предшествующего, и больщем в начале текущего импульса, чем после его окончания. Пример. При непрерывной регистрации гидромеханических импульсов, возникающих от начала продвижения керноприемника до момен та его посадки в рабочее положение, когда дополнительно генерируется определенная последовательность импульсов, возможны несколько вариантов соотношения измеряемых величин. Возможные варианты и получаемая при этом информация приведены в таблице. На чертеже приведена структурная схема устройства для осуществления способа определения посадки в рабочее положение съемного керноприемника. Устройство содержит датчик 1 гидромеханических колебаний, жестко закрепленный на бурильной колонне, фильтр 2 нижних частот, усилитель 3 с регулируемым коэффициентом усиления, кодирующий блок 4, блок 5 задержки, схемы 6 и 7 сравнения, блоки 8 и 9 памяти, коммутирующий блок 10, декодирующий блок 11, блок 12 управления и блок 13 регистрации. Датчик 1 гидромеханических колебаний через фильтр 2, усилитель 3 и кодирующий блок 4 соединен с блоком 5 задержки, вход и выход которого подключены к схеме 6, предназначенной Для сравнения текущей информации и предшествующей. Выход схемы сравнения 6 подсоединен к блоку 12 управления, выходы которого соединены с входами блоков памяти 8 и 9 и с входами коммутирующего 10 и декодирующего П блоков, при этом выход блока управления соединен с одним из входов схемы 7 сравнения. Выход декодирующего блока II соединен с блоком 13 регистрации, который информипует о положении керноприемника, например, с помощью светового табло. Последовательность импульсов в момент посадки керноприемника в рабочее положение создается забойным генератором .14. Устройство работает следующим; образом. Перемещают буровой инструмент в бурильной колонне, при- этом возникают естественные гидромеханические колебания, а после посадки инструмента в рабочее положение генератором 14 возбуждают искусственные гидромеханические импульсы определенной последовательности. Указанные колебания, распространяясь по бурильной колонне и буровому раствору, преобразуются датчиком 1 в электрический сигнал. После выделения рабочей части спектра частот в фильтре 2 и усилителе 3 сигнал поступает на вход кодирующего блока 4. С выхода блока 4 информация в двоичном коде поступает на один, из входов схемы 6 сравнения, а Через блок 5 задержки - на второй вход схемы 6. В схеме 6 в результате сравнения текущей и задержанной информации вырабатываются сигналы, соответствующие моментам времени начала, экстремального значения и окончания импульса гндромеханических колебаний. При поступлении этих сигналов в блок 12 управления в нем вырабатываются команды, управляющие работой блоков 8 и 9 памяти, коммутирующего блока 10, схемы 7 сравнения и декодирующего блока 11. В момент времени, соответствующий началу импульса гидромеханических колебаний, блок 12 управления выдает в блок 8 памяти команду разрешения записи информации об уровне фона гидромеханических колебаний в момент начала текущего импульса.
В момент наличия экстремального значения текущего импульса блок 12 управления выдает в комллутирующий блок 10 команду, разрешающую прохождение информации об экстремальном значении предшествующего импульса с блока 9 памяти на один из входов схемы 7 сравнения. На второй вход схемы 7 через блок 5 задержки поступает информация об экстремальном значении текущего импульса, и в схеме 7 происходит сравнение экстремальных значений текущего и предществующего импульсов. Независимо от результата сравнения блок 12 управления по окончании сравнения выдает в блок 9 памяти команду разрешения перезаписи информации об экстремальном значении текущего импульса. При этом если экстремальное значение текущего и мпульса больше предшествующего, то схема 7 выдает импульс, поступающий на один из входов декодирующего блока и производящий его запуск.
В момент окончания текущего импульса гидромеханических колебаний блок 12 управления выдает в коммутирующий блок ГО команду, разрешающую прохождение информации об уровне фона в момент начала текущего импульса с блока 8 памяти через коммутирующий блок 10 на один из входов схемы 7 сравнения. На второй вход схемы 7 поступает информация, соответствующая уровню .фона в момент окончания текущего им6
пульса. При этом если уровень фона в момент окончания импульса меньше, чем в мо.мент начала, то сигнал, поступающий с выхода схемы 7 на управляющий вход декодирующего блока И, разрешает синхронное накопление импульсов, формируемых блоком 12 управления в момент наличия экстремальных значений импульсов гидромеханических колебаний.
В декодирующем блоке 11 формируются опорные импульсы, временная расстановка которых соответствует гидромеханическим импульсам искусственно возбуждаемым после посадки инструмента в рабочее положение. Если в декодирующем блоке 11 произошло совпадение во времени не менее трех первых импульсов, то в блок 13 регистрации поступает сигнал посадки инструмента в рабочее положение, в случае совпадения менее трех импульсов - сигнал о стопорении инструмента в бурильной колонне.
Использование данного способа регистра ции момента посадки съемного керноприемника и устройство для его осуществления позволяет повысить производительность-труда при бурении разведочных скважин до глубины 1200 м с использованием съемных керноприемников, а также исключить применение специальных кабель-тросов для спуска бурильных коронок.
Продолжение таблицы
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ БУРЕНИЕМ СКВАЖИНЫ | 2019 |
|
RU2697988C1 |
| Устройство для управления процессом турбинного бурения | 1983 |
|
SU1104247A1 |
| Система автоматического управления процессом механического колонкового бурения | 1977 |
|
SU739219A1 |
| ТЕКУЩИЙ КОНТРОЛЬ И УПРАВЛЕНИЕ ОПЕРАЦИЯМИ НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ И ИХ МОДЕЛИРОВАНИЕ | 2014 |
|
RU2617817C2 |
| Устройство для измерения углубления долота при бурении глубоких скважин | 1982 |
|
SU1040126A1 |
| СИСТЕМА КОДИРОВАНИЯ СБРОСА ДАВЛЕНИЯ ДЛЯ ПЕРЕДАЧИ СКВАЖИННОЙ ИНФОРМАЦИИ ПО СТВОЛУ СКВАЖИНЫ НА ПОВЕРХНОСТЬ | 2011 |
|
RU2592000C2 |
| Система для автоматического управления режимами бурения скважин | 1974 |
|
SU727841A1 |
| Устройство для управления процессом пакеровки с гидромеханическим пакером | 1983 |
|
SU1183666A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОДАЧИ БУРОВОГО ИНСТРУМЕНТА В ПРОЦЕССЕ БУРЕНИЯ | 2018 |
|
RU2681325C1 |
| ОЦЕНОЧНЫЙ ЛИСТ БУРЕНИЯ | 2010 |
|
RU2496004C9 |
