1
Изобретение относится к области горной промышленности, а именно к гидравлическим системам дистанционного управления шахтными механизированными крепями, и может найти применение и в других машинах с гидроприводом, управляемым многопозиционным гидравлическим распределителем.
Известно устройство дистанционного управления механизированной крепью, содержаш,ее командный золотниковый гидрораспределитель для подачи рабочей жидкости к гидроцилиидру переключения (шаговому приводу) и к исполнительным механизмам. Золотник гидрораспределителя снабжен соответственно двумя группами втулок {.
Недостатком такого устройства является то, что оно обеспечивает надежное управление только в пределах видимости исполнительных механизмов и требует значительного времени на управление многопозиционным гидравлическим распределителем.
Наиболее близким техническим решением к изобретению является устройство управления многопозиционным гидравлическим распределителем, содержаш,ее шаговый привод и корпус с располо}кенным в нем поворотным элементом с профильной дорожкой, формирующим командные сигналы, и кинематически связанным с ним раснределительным элементом 2.. - Недостатком этого устройства является отсутствие обратной связи в линии управления шагового нривода, что снижает надежность и оперативность дистанционного включения любой позиции многопозиционного раснределителя.
Цель изобретения - повышение надежности и оперативности дистанционного включения любой позиции многоиозиционного распределителя.
Это достигается тем, что устройство снабжено обратной связью по давлению в линии управления шагового привода, выполненной в виде иоднружинеиных поршней гидроцилиндров одностороннего действия, кинематически связанных с профильной дорожкой, а гидравлически их нолости сообш,ены с линией управления шагового привода. В предложенном иснолнении обеспечивается надежное онеративное управление многопозиционным распределителем, причем позиция рукоятки элемента, формирующего командные импульсы, однозначно определяет позицию мпогопозицпонного распределителя.
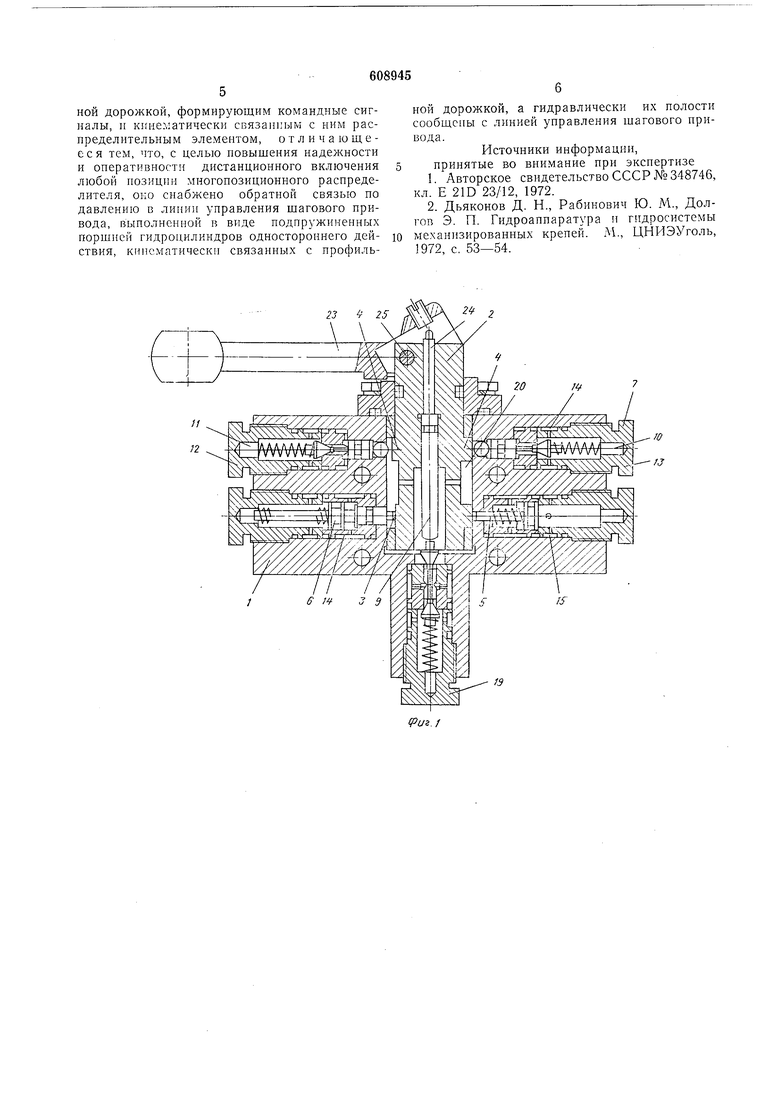
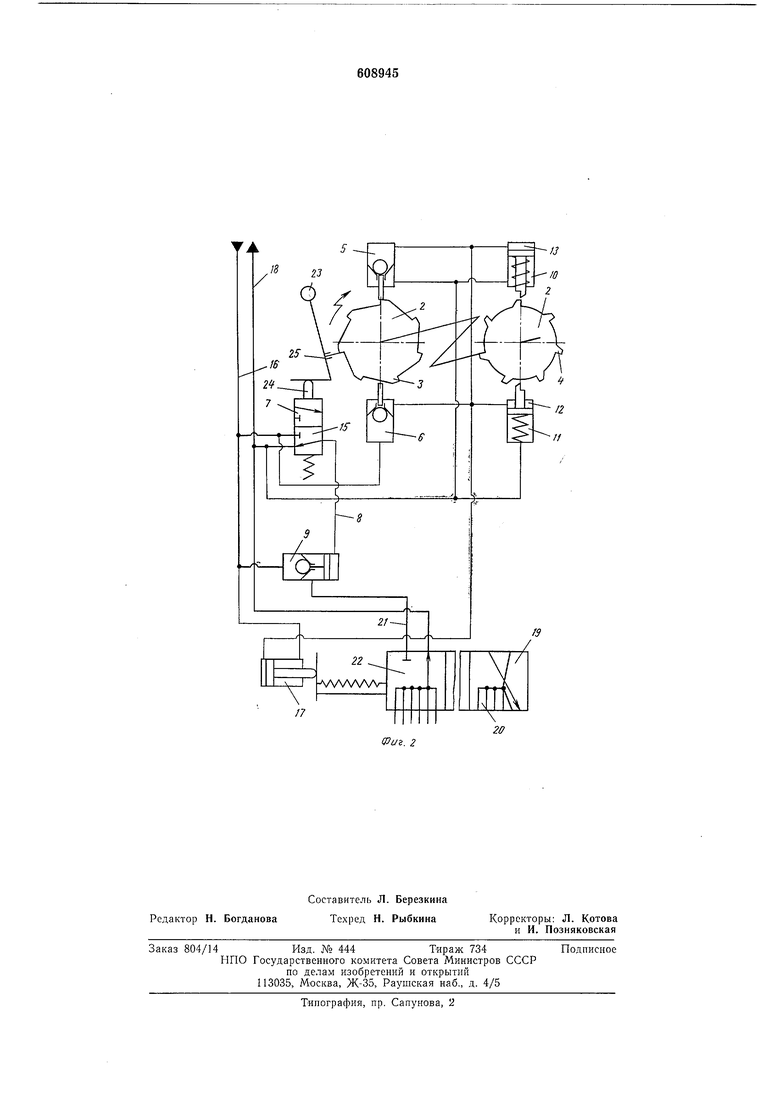
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - принципиальная гидрокинематическая схема устройства.
Устройство содержит корпус 1, в котором
размещен новоротпый элемент 2 с профильными дорожками 3 и 4, формирующий командные импульсы. С профильной дорожкой 3 кинематически связаны штоки распределительных элементов 5 и 6, выполненных, например, в виде управляемых обратных клапанов. Для дистанционного включения многопозиционного распределителя 7 устройство снабжено обратной связью по давлению в линии 8 управления шагового привода 9, выполненной в виде подпружиненных поршней 10 и
11гидроцилиндров 12 и 13 одностороннего действия. Штоки поршней 10 и 11 кинематически связаны с профильной дорожкой 4. Полости 14 гидроцилиндров 12 и 13 и полости 15 распределительных элементов 5 и 6 гидравлически, папример каналами, сообш,ены с линией 8 управлеиия шагового привода 9.
Усилие предварительного сжатия пружины гидроцилиндра 12 превышает усилие, возникающее от давления жидкости в линии 8 управления шагового привода 9 при его переключении, а усилие предварительного сжатия прзжипы гидроцилиндра 13 меньше усилия, возникающего от давления жидкости в линии 8 управления шагового привода 9 в момент его перемещения в исходное положение. Подпружиненные поршни 10 и 11 гидроцилиидров
12и 13 образуют, таким образом, обратную связь по давлению в линии управления шагового привода. Полости 15 элементов устройства сообщены с напорной линией 16, а полости 17 элементов устройства - с сливной линией 18. Кроме того, устройство снабжено распределителем 19, иолость 20 которого сообщена с линией 21 управления впускного клапана 22 многопозиционного распределителя 7. Распределитель 19 кинематически связап с рукояткой 23 с помощью толкателя 24, расположенного в поворотном элементе 2. Рукоятка 23 закреплена на элементе 2 с помощью оси 25. В исходном положении полости 14 сообщены со сливной линией 18, причем шток гидроцилиндра 12 находится во впадине профильной дорожки 4. Распределительный элемент 5 закрыт.
Устройство работает следующим образом.
При повороте рукояткой 23 элемента 2 в заданную позицию под воздействием профильной дорожки распределительный элемент 5 открывается, а элемент 6 закрывается. При этом полости 14 гидроцилиндров 12 и 13 и линия 8 управления шагового привода 9 сообшаются с напорной линией 16. Так как усилие предварительного сжатия пружины гидроцилиндра 12 превышает усилие, возникающее от давления жидкости в линии 8 при переключении шагового привода 9, шток поршня 10 расположен во впадине профильной дорожки 4 и предохраняет элемент 2 от дальнейшего поворота до момента полного срабатывания шагового нривода 9 и повышения давления в линии 8 и полости 14 до величины, достаточной для сжатия пружины гидроцилиидра 12. После выхода штока гидроцилиндра 12 из впадины профильной дорожки 4 при повороте
элемента 2 закрывается элемент 5, выступом профильной дорожки открывается элемент 6, и шаговый привод 9 возвращается в исходное положение. При этом следующий управляющий сигнал (дальнейший поворот элемента 2) может быть подан только после возврата шагового привода в исходное положение (когда давление в линии 8 и нолостях 14 будет равно давлению в сливной линии 18 и
шток гидроцилиндра 13 выйдет из впадины профильной дорожки 4). Так осуществляется обратная связь по давлению в линии управления шагового привода.
При дальнейшем повороте элемента 2 устройство работает аналогично описанному. При повороте элемента 2 каждому выступу профильной дорожки 3 соответствует одно срабатывание шагового привода 9 многопозиционного распределителя 7, т. е. шаговый
привод переключает раснределитель в следующую позицию при совмещении штока раснределительного элемента 5 с выступом профильной дорожки 3 элемента 2. Когда щток элемента 5 совмещается с впадиной профильной дорожки 3, шаговый нривод возвращается в исходное положение.
После переключения раснределителя 7 в нужную позицию поворотом рукоятки 23 вокруг оси 25 через толкатель 24 переключается распределитель 19, и по линии 21 жидкость из напорной линии 16 поступает в полость управлеиия впускного клапана 22. При этом силовой поток жидкости через распределитель 7 поступает к исполнительным механизмам.
По окопчании операции рукоятка 23 отпускается, распределитель 19 возвращается в исходное положение, сообщая линию 21 управления впускного клапана 22 со сливной линией 18, впускной клапан 22 закрывается.
Элемент 2 устанавливается в исходное положение - соответственно в исходное положение устанавливается раснределитель 7.
Наличие обратной связи по давлению в линии управлепия щагового привода устраняет
возможность подачи ложного сигнала на переключение шагового привода, пока он не переместится в нужное положение, чем резко повышается надежность дистанционного управлепия шаговым приводом. С другой стороны, наличие обратной связи, а также конструктивное выполнение элемента, формирующего командные имнульсы, имеющего количество положений, равное количеству позиций управляемого многопозиционного распределителя, обеспечивает более оперативное включение любой позиции управляемого распределителя, так как не требуется выдержка времени перед подачей очередного сигнала на перемещение шагового привода.
Формула изобретения
Устройство управления многопозициониым гидравлическим распределителем, содержащее шаговый привод и корпус с расположенным в нем поворотным элементом с профильной дорожкой, формирующим командные сигналы, и к не:у:атически связанным с ним раснределнтельным элементом, отличающееся тем, что, с целью новыщения надежности и онеративностн дистанционного включения любой нозиции многопозиционного распределителя, око снабжено обратной связью по давлению в линии управления щагового привода, выполненной в виде подпружиненных поршней гидроцилиндров одностороннего действия, кинематическн связанных с профильной дорожкой, а гидравлически их полости сообщены с линией управления щагового привода. Источники информации, принятые во внимание при экспертизе 1.Авторское свндетельство СССР №348746, кл. Е 21D 23/12, 1972. 2.Дьяконов Д. Н., Рабинович Ю. М., Долгов Э. П. Гидроаппаратура и гидросистемы механизированных крепей. М., ЦНИЭУголь, 972, с. 53-54.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления многоступенчатой трансмиссией | 1989 |
|
SU1682217A1 |
| Система управления гидромеханической коробкой передач транспортного средства | 1985 |
|
SU1316859A1 |
| Устройство управления многоступенчатой трансмиссией | 1988 |
|
SU1544597A1 |
| Гидравлический дискретный привод | 1979 |
|
SU1043370A1 |
| Устройство управления многоступенчатой трансмиссией | 1985 |
|
SU1369936A1 |
| Устройство управления секцией гидрофицированной крепи | 1974 |
|
SU542003A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| Устройство для управления механизированной крепью | 1985 |
|
SU1273595A1 |
| Устройство управления многоступенчатой передачей транспортного средства | 1985 |
|
SU1341072A1 |
| Гидравлический дискретный привод | 1978 |
|
SU879063A1 |
п
13
0
