(54) ДВУХКАНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД
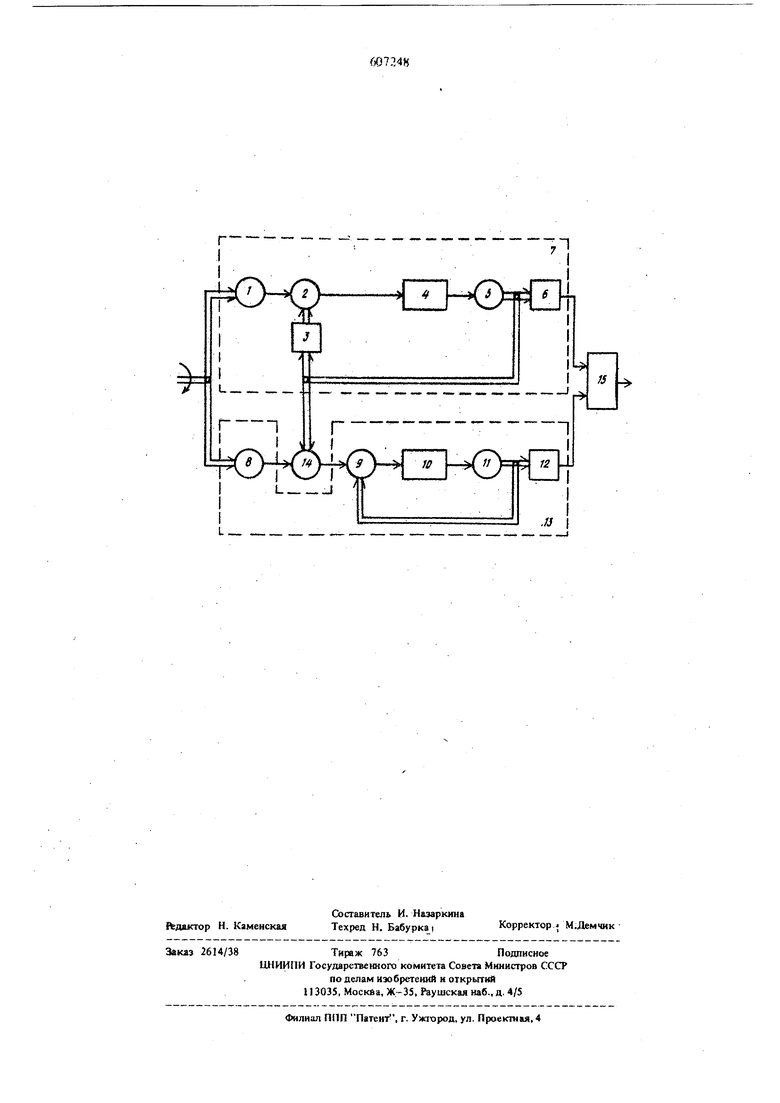
Boro положения, приемник 2, редуктор 3, ycsuiHтель 4, исполнительный двигатель 5, многоотсчетньш преобразователь 6 утоп-код, входящие в основной канал 7, и многополюсный датчик 8 углового положения, приемник 9, усилитель 10, исполнительньп1 двигатель 11, многоотсчетный преобразователь 12 угол-код, входящие в корректирующий канал 13. Кроме того, двухканальный преобразователь уг ла поворота вала в код содержит дополнительный приемник 14 и сумматор 15 числовых эквивален{тов.
Двухполюсньш 1 и многополюооый 8 датчики углового положе1шя кинематически связаны между собой и установлены на валу с ценш оборота . Двухполюсный датчик 1 и приемник 2 основного канала 7 включены по трансформаторной схеме. Приемник 2 через усилитель 4 подключен к испол1штельному двигателю 5, вал которого кинематически связан с ротором дополнительного двух полюсного приемника 14 связи каналов 7 и 13, с валом многоотсчетного преобразователя 6 зтолкод оснсжного канала 7 и через редуктор 3 с ротором приемника i угла 2.
Многополюсный; датчик 8 угла корректирующего канала и двухполяосные приемники 14 и 9, установленные на валах с 1«ЁНШ оборота 360/Р°/об, (где Р - коэффициент редукщш датчика 8), включены по дифферешдаальноа схеме и через усилитель 10 подключены к исполнительному двигателю
11корректирующего канала 13, который кинематически связан с ротором двзгхполюсного приемника угла 9 и с валоц многоотсчетного преобрадавателя
12угол-код корректирующего кашла 13.
Цифровые коды лшогоотсчетных преобразователей 6 к 12 угол-код основного 7 и корректирующего 13 кш{алов сум1ъ шруются в сумматоре 15 чисJювыx экю1валентов. Выходаой код сумматора представляет собш числовой эквивалент входного .
В ис рдном состоянии датчики 1 и 8 и приемники угла 2, 9, 14 }шходятсй в согласованном по южении. При изменении углового положения входного вала следящая система основного канала 7 отрабатьшает это измене№4е с динамической ощибкой, определяемой данамйческкми свшствами канала. Угловое положение выходного вала основного канала посредством дополнительного двухполюсного приемника 14, кинематически связанного с пртемником 2, вводится в корректирующий канал
13, где вычитается из сигнала многополюсного датвдка 8 углового положения.
1 аким образом, корректирующий канап 13 отрабатывает лиио ОЕШбку основного канала 7. Сумма Кодов, соответствующих положению выходных валов основного и корректирующего каналов 7 и 13, представляет собой числовой эквивалент углового положения входного вала.
Так как астатизм системы равен двум, скоростная ошибка преобразования равна нулю, а ошибка по ускорению значительно уменьшается.
Использование нового элемента - двухполюсного приемника 14 угла позволяет получить высокие точности преобразования в широком диапазоне скоростей входного вала (до 50°/с) без значительного усложнения конструкции.
Формула изобретения
Двухканальный преобразователь угла поворота вала в код, содержащий основной и корректирующий каналы, в каждом из которых приемники через силителИ соединены с исполнительными двигателями, роторы которых связа1П 1 с валами многоотсчетных преобразователей угол-код, выходы которых подключены к входам сумматора, в основном канале ротор исполггательного двигателя связан через редуктор с прЕемником, вход которого соединен с выходом двухполюсного датчика углового положения, а в корректирующем канале ротор исполнительного даигатеяя связан с приемником -непосредственно и установлен многополюсный датчик углового положения, ротор которого гаязан с ротором двухполюгезго датчика углового положения основного канала и с входным валом, отличающийся ISM, что, с целью повьпления точности преобразователя, в него введен дополнительный /приемник, вход которого соединен с выходом многополюсного датчика углового положения, а выход - с входом приемника корректарующего канала, ротор .дополнительного приемника связан с ротором исполните льного.даигателя основного канала.
Источники информшши, принятые во внимание при экспертизе:
1.Зверев А, Е. и др. Преобразователи угловых перемещешй в цифровой код, 1974, с. 75-78.
2. Авторское свидетельство СССР N 267205, кл. G 08 С 9/04, 1970.
L
ff
П I JJ
./J I
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| СИСТЕМА ПРЕОБРАЗОВАНИЯ УГОЛ—КОД | 1970 |
|
SU267205A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU660072A1 |
| Фазовая система для преобразованияуглА пОВОРОТА B КОд | 1979 |
|
SU842901A2 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU788140A1 |
| Фазовая система преобразования угла поворота в код | 1974 |
|
SU567163A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для преобразования угла поворота вала в код | 1976 |
|
SU640353A1 |
| Устройство преобразования угловых величин в код | 1976 |
|
SU595756A1 |
| Следящая система | 1980 |
|
SU885970A1 |