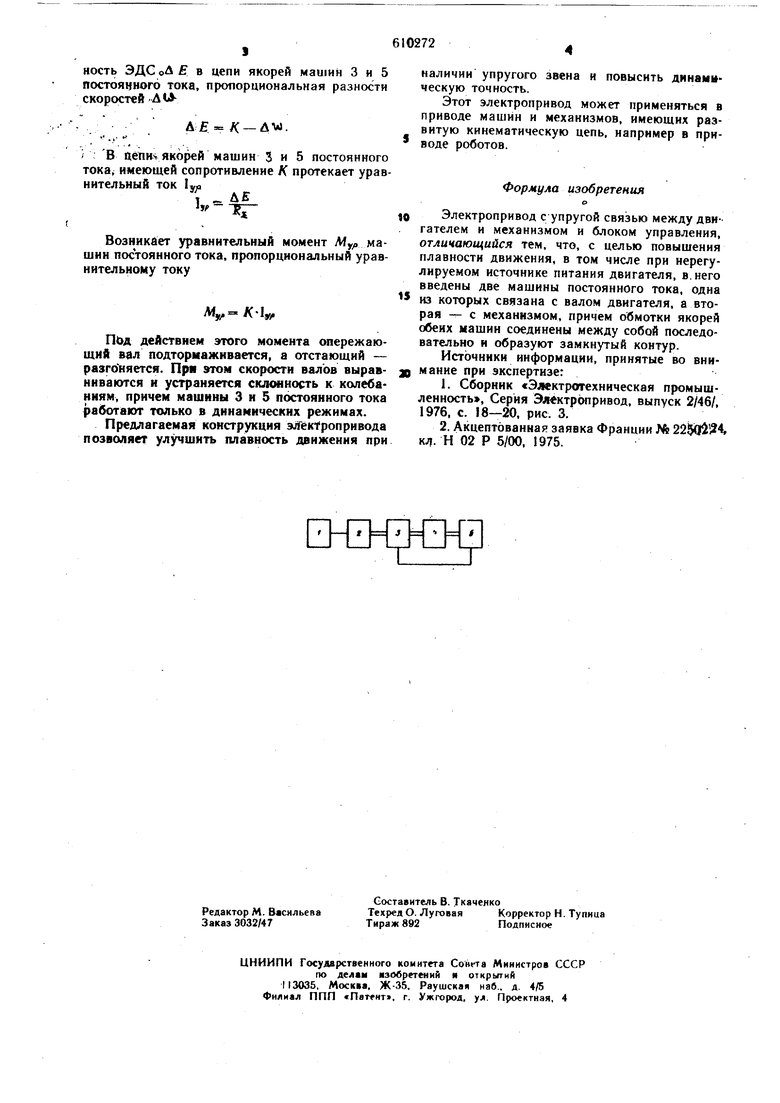
Изобретение относится к электроприводам и может быть использовано в системах автоматического управления с упругими звеньями, требующих высокой динамической точности и плавности движения, например в приводе робэтов. Известен электропривод, содержащий упругие звенья, в который введён датчик момента, соединенный со входом резистора момента и через дифференцирующее звено - со входом регулятора тока, что позволяет уменьщнть крутильные колебания и повысить быстродействие (I}. Однако необходимость введения дифференцирующего звена уменьщает помехоустойчивость электропривода. Кроме того, такое демпфирование колебаний может применяться только при наличии регулируемого источника питания двигателя. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является электропривод с упругой связью между двигателем и механизмом и блоком управлеиия в котором на валах двигателя и мехаиизме установлены два тахогенератора, которые через блок вычитания связаны системой управления двигателем, что позволяет уменьшить колебания двигателя и механизма (2. Однако это устройство требует управляемого преобразователя,через который осуществляется воздействие на двигатель и уменьшается эффективность демпфирования колебаний. Цель изобретеиия - повыщение плавности движения, в том числе при нерегулируемом источнике питания двигателя. Эта цель достигается тем, что в электропривод с упругой связью между двигателем и механизмом и блоком управлеиия введеиы две машины постоянного тока, одна из которых связана с валом двигателя, ji вторая - с механизмом, причем обмотки якорей обеих машин соединены между собой последовательно и образуют замкнутый контур. На чертеже изображена блок-схема электропривода. Электропрнвод,родержит блок управлеиия 1, приводной двигатель 2, машину 3 постоянного тока, связанную с валом приводного двигателя, упругое звено 4 и машину 5 постоянного тока, соединенную с выходным валом упругого звена 4, связанного с механизмом. Электропривод работает следующим образом. При возннкновении рассогласовання по скорости вала приводного двигателя 2 и выходнего вала упругого звена 4 возникает разность ЭДС оА Я в цепи якорей маижн 3 н 5 постоянного тока, пропорциональная разности скоростей А WДЯ /( -AVJ.
,. «г
; В аепич якорей машин 3 и 5 постоянного тока имеющей сопротивление /С протекает уравнительный ток 1у/)
1 Д
Возникает уравнительный момент Afy машин постоянного тока, пропорциональный уравнительному току
М,../С-1
у/
у/
ПЬд действием этого момента опережающий В0Л подтормаживается, а отстающий - разгоняется. При этом скорости валов выравниваются и устраняется склонность к колебаниям, причем машины 3 и 5 постоянного тока работают только в динамических режимах.
Пре/и1агаемая конструкция элeкfpoпpивoдa позволяет улучшить плавность движения при
наличии упругого звена и повыснть динамическую точность.
Этот электропривод может применяться в приводе машин н механизмов, нмеюшнх развитую кинематическую цепь, например в приводе роботов.
Формула изобретения
о
Электропривод с упругой связью между двигателем и механизмом и блоком управления, отличающийся тем, что, с целью повышения плавности движения, в том числе при нерегулируемом источнике питания двигателя, в. него введены две машины постоянного тока, одна
из которых связана с валом двнгателя, а вторая - с механизмом, прнчем обмоткн якорей обеих машин соединены между собой последовательно и образуют замкнутый контур.
Источники информации, принятые во внимание при экспертизе;
1.Сборник «Электротехническая промышленность. Серия Электропривод, выпуск 2/46/, 1976, с. 18-20, рис. 3.
2.Акцептованная заявка Франции № 22$iQ|il34 кл. Н 02 Р 5/00, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1978 |
|
SU790090A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| Устройство для регулирования момента в упругой трансмиссии электропривода | 1978 |
|
SU746846A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU373825A1 |
| Электропривод | 1986 |
|
SU1390756A2 |
| Устройство для регулирования скорости многомассового упругого механизма | 1980 |
|
SU900265A1 |
| Устройство для ограничения динамических усилий в механизме экскаватора | 1987 |
|
SU1509488A1 |
| Электропривод для нереверсивнойНЕРЕгулиРуЕМОй пРОКАТНОй КлЕТи | 1978 |
|
SU807470A2 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1988 |
|
SU1548835A1 |
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1988 |
|
SU1588846A2 |
