{Изобретение относится к системам автоматического регулирования, а именно к устройствам управления электроприводами наведения радиотелескопов и может быть использовано при построении систем управления различных механизмов и машин, в которых соединение электродвигателя с исполнительным механизмом и элементов исполнительного механизма между собой осуществляется через упругие связи.
Известны устройства, использование которых в упругих системах управления электроприводами позволяет получить плавное и быстрое движение исполнительной оси механизма 1,
Недостатком этих устройств является необходимость острой настройки.
Известно также устройство, использующее обратную связь по упругому моменту на валу механизма, обеспечивающее эффективное демпфирование колебаний 2.
Однако это устройство требует использования магн|- тоупругого 11змерителя крутящего момента, что технически возможно далеко не всегда.
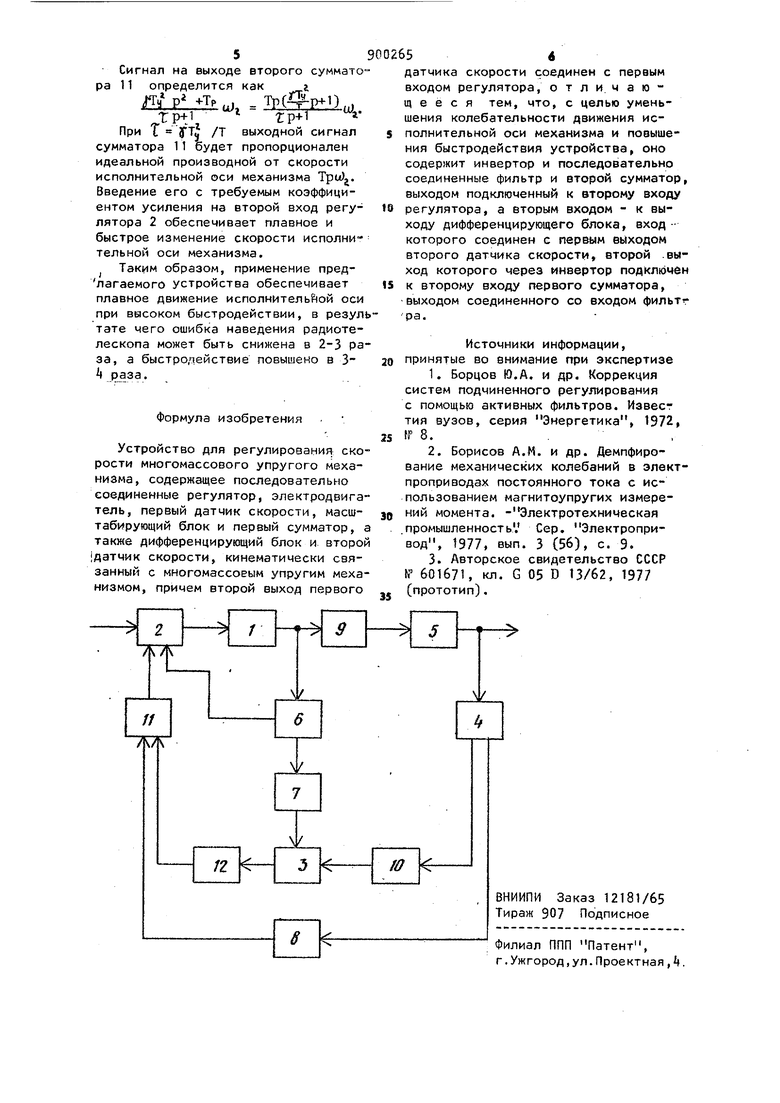
Наиболее близким по тexii iческой сущности к предлагаемоглу : зобретению является устройство для рс улирования скорости многомассового упругого механизма, содержащее последовательно соединенные регулятор, электро10двигатель и первый датчик скорости, первый выход которого подключен к первому входу регулятора и второй датчик скорости, кинематически связанный с многомассовым упругим ме15ханизмом, а также последовательно соединенные масштабирующий блок, сумматор и дифференцирующий блок, выход которого подключен ко второму входу регулятора, вход мacшfaбиpyющeгo блогока соединен со вторым выходом первого датчика скорости,, а второй вход сумматора подключен к выходу второго датчика скорости Сз1. Недостаток известного устройства связан с тем, что реальные дифференцирующие блоки обладают запаздыванием (конечной инерционностью), из-за чего осуществляемое ими дифференцирова ние не является точным. Если частота собственных упругих колебаний системы двигатель-механизм близка к зоне частот, где сказывается влияние запаздывания дифференцирующего блока, то реализовать расчетную глубину обратной связи по ускорению исполнительной оси механизма не удается из-за неустойчивос устройства, В связи с этим приходится уменьшать глубину обратной связи по ускорению, в результата чего обес печить высокую плавность движения исполнительной оси механизма не удается. Цель изобретения - уменьшение колебательности движения исполнительно оси механизма и повышение быстродействия устройства. Указанная цель достигается тем , что в устройство, содержащее последо вательно соединенные регулятор, электродвигатель, первый датчик скорости, масштабирующий блок и первый сум матор а такх{е дифференцирующий блок и второй датчик скорости, кинематически связанный с многомассовым упру гим шханизмом, причем второй выход первого датчика скорости соединен с первым входом регулятора, введены инвертор и последовательно соединенные фильтр и второй сумматор, выходо подключенный к второму входу регулятора , а вторым входом - к выходу диф ференцирующего блока, вход которого соединен с первым выходом второго датчика скорости, второй выход которого через инвертор подключен к второму входу первого сумматора, выходо соединенного со входом фильтра. .Благодаря особенности исполнения, в предлагаемом устройстве, в отличие от известных, сигнал обратной связи по ускорению исполнительной.оси механизма пропорционален идеальной производной от скорости исполнительной оси, т.е. исключается запаздывание дифференцирующего блока. На чертеже схематично изображено предлагаемое устройство. Устройство содержит электродвигатель 1 с замкнутым контуром регулирования тока, регулятор 2 и первый сумматор 3. Второй датчик скорости 4 кинематически связан с исполнительной осью механизма 5, а первый датчик скорости 6 - с валом электродвигателя 1. Для выравнивания уровней сигналов датчиков скорости применен масштабирующий блок 7, вход которого включен на первый выход датчика скорости 6, а выход соединен с первым входом сумматора 3. Вход дифференцирующего блока 8 подключен на первый выход датчика скорости 4, благодаря чему сигнал на его выходе пропорционален определенному с запаздыванием ускорению исполнительной оси механизма 5, связанного с электродвигателем через упругое звено 9, Ко второму входу сумматора 3 подключен через инвертор 10 второй вход датчика скорости t. Ко входам второго сумматора t1 подключен выход первого сумматора 3 через фильтр 12 и выход дифференцирующего блока 8. Ко входам регулятора 2 подсоединены второй выход датчика скорости 6 и выход сумматора 11. Устройство работает следующим образом. Сигнал, задающий необходимую скорость, подаётся на вход регулятора 2, т.е. на вход замкнутого контура регулирования скорости, образованного обратной связью с первого датчика скорости б на вход регулятора 2. Скорости электродеигателя 1 (и). ) и исполнительной оси механизма 5 () в двухмассовой упругой системе связаны между собой выражением где hTj - постоянная времени упругих колебаний исполнительной оси механизма при закрепленной оси вала электродвигателя. Напряжение на выходе дифференцирующего блока 8 связано со скоростью исполнительной оси механизма 5 передаточной функцией Тр/(Тр + 1) где Т характеризует запаздывание при реальном дифференцировании с постоянной времени Т. Если выбрать постоянную времени фильтра 12, представляющего собой апериодическое звено, равной Т , то сигнал на его выходе будет T -gf-.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования силовых параметров и рабочей подачи процесса резания | 1985 |
|
SU1270744A1 |
| Устройство для управления двухдвигательным электроприводом | 1985 |
|
SU1293814A1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| Устройство для управления приводом передвижения тележки с гибким подвесом груза | 1989 |
|
SU1684239A1 |
| Устройство для виброзащиты сиденья транспортного средства | 1983 |
|
SU1124266A1 |
| Устройство для стабилизации скорости подачи проволоки в механизме подачи проволоки электродуговой установки | 2023 |
|
RU2832031C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Система управления | 1983 |
|
SU1120283A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
