Фи2.1
Ичобретение относится к электротехнике и может быть использовано в электроприводах производственных механизмов .
Целью изобретения является улучшение демпфирования упругих колебаний.
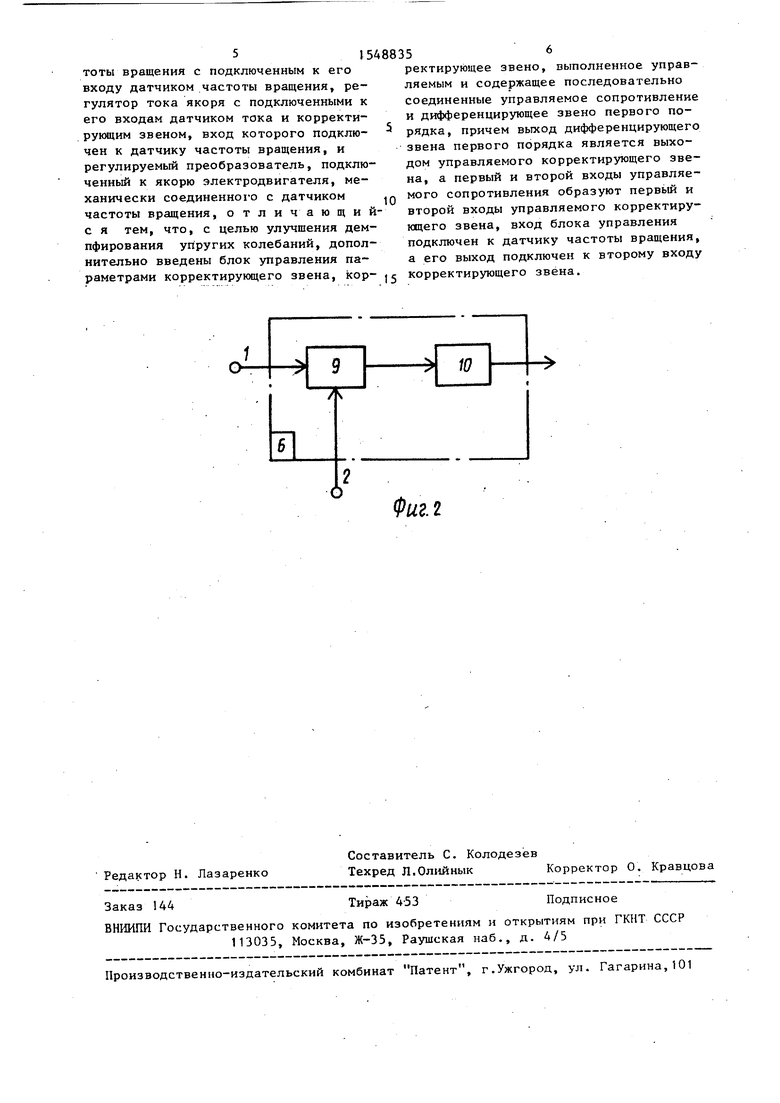
На фиг. I представлена функциональная схема электропривода; на фиг, 2 - Функциональная схема управляемого кор ректнрующего звена.
Электропривод с упругой связью меж ду электродвигателем и механизмом содержит электродвигатель 1 и последова тедъно соединенные регулятор 2 частоты вращения с подключенным к его входу датчиком 3 частоты вращения, регулятор 4 тока якоря с подключенными к его входам датчиком 5 тока и корректирующим эвеном 6, вход которого подключен к датчику 3 частоты вращения и регулирует преобразователь 7, подключенный к якорю двигателя 1, механически соединенного с датчиком 3 частоты вращения.
В электропривод дополнительно введен блок 8 управления коррекции, подключенный входом к выходу датчика 3 частоты вращения, а выходом - к второму входу корректирующего звена 6.
Управляемое корректирующее звено 6 (фиг. 2) содержит последовательно соединенные управляемое сопротивление 9 и дифференцирующее звено 10 первого порядка, причем вход дифференцирующего звена 10 является выходом корректирующего звена 6, а первый и второй вход управляемого сопротивления 9 образуют соответственно первый и второй входы управляемого корректирующего звена 6.
Электропривод функционирует следующим образом.
Электродвигатель 1 с упругой связью с механизмом питают от тиристор- ного преобразователя 7, которым управляют регулятором тока 4, на входе которого сравнивают сигналы тока якоря, контролируемого датчиком тока 5, и задания на ток якоря от регулятора скорости 2, на входе которого сравнивают сигналы задания и обратной связи по скорости от датчика скорости 3. Демпфирование упругих колебаний электромеханической системы двигатель - механизм осуществляют с помощью корректирующего звена 6, имеющего передаточную функцию
и (п - л i.E- ,
Wktp / кЈкр+1
где Р)к К/1Ц - коэффициент звена 6;
0
5
0
5
0
5
0
5
5
0
t
R9/c
постоянная времени эвена 6; R - сопротивление управляемого сопротивления звена 9;
R - сопротивление цепи обратной связи звена 10. На вход звена 6 поступает сигнал датчика 3 скорости, а сформированный звеном 6 сигнал подают на вход регулятора 4 тока, что способствует демпфированию колебаний тока и уменьшению колебаний в системе двигатель - механизм. На второй управляющий вход корректирующего звена 6, являющийся входом управления сопротивления 9, подают сигнал с выхода блока 8 управления параметрами коррекции, который настраивают таким образом, чтобы уровень его выходного сигнала был равен нулю при частоте упругих колебаний определенной начальной настройкой параметров корректирующего звена 6 начальным значением управляемого сопротивления 9, выходной сигнал которого подают на дифференцирующее звено 10.
При отклонении частоты упругих колебаний, например при ее увеличении, сигналом с выхода блока 8 управления изменяют входное сопротивление 9 корректирующего звена 6 в сторону уменьшения, а тем самым увеличивают коэффициент усиления и уменьшают постоянную времени корректирующего звена 6. При уменьшении частоты упругих колебаний с выхода блока 8 управления сигнал увеличивает входное сопротивление 9, тем самым уменьшается коэффициент усиления и увеличивается постоянная времени корректирующего звена 6. Таким образом, изменяя параметры корректирующего звена 6 в зависимости от частоты упругих колебаний, добиваются максимального демпфирования упругих колебаний в системе двигатель - механизм.
Формула изобретения
Электропривод с упругой связью между электродвигателем и механизмом, содержащий электродвигатель и последовательно соединенные регулятор частоты вращения с подключенным к его входу датчиком частоты вращения, регулятор тока якоря с подключенными к его входам датчиком тока и корректирующим звеном, вход которого подключен к датчику частоты вращения, и регулируемый преобразователь, подключенный к якорю электродвигателя, механически соединенного с датчиком частоты вращения, отличающий с я тем, что, с целью улучшения демпфирования упругих колебаний, дополнительно введены блок управления параметрами корректирующего звена, кор-
с
ректирующее звено, выполненное управляемым и содержащее последовательно соединенные управляемое сопротивление и дифференцирующее звено первого порядка, причем выход дифференцирующего звена первого порядка является выходом управляемого корректирующего эвена, а первый и второй входы управляемого сопротивления образуют первый и второй входы управляемого корректирующего звена, вход блока управления подключен к датчику частоты вращения, а его выход подключен к второму входу корректирующего звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| Электропривод | 1978 |
|
SU790090A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1984 |
|
SU1241394A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| Управляемый электропривод | 1980 |
|
SU1034016A1 |
| Электропривод | 1986 |
|
SU1390756A2 |
| Электропривод постоянного тока с упругой механической связью между электродвигателем и механизмом | 1985 |
|
SU1325654A1 |
| Способ управления электроприводом поворота экскаватора и устройство для его осуществления | 1986 |
|
SU1416626A1 |
| Электропривод постоянного тока | 1977 |
|
SU788321A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА ДЛЯ УПРАВЛЕНИЯ ОБЪЕКТОМ С УПРУГИМИ СВЯЗЯМИ | 2011 |
|
RU2489797C1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах производственных механизмов. Целью изобретения является улучшение демпфирования упругих колебаний. Устройство содержит блок 8 управления параметрами коррекции, подключенный входом к выходу датчика 3 частоты вращения, а выходами - к второму входу корректирующего звена 6. В устройстве обеспечивается изменение параметров корректирующего звена 6 в зависимости от частоты колебания скорости вала двигателя 1. 2 ил.
О
Фиг. 2
| Авторское свидетельство СССР № 1198172, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Егоров В.Н., Шестаков В.М | |||
| Динамика систем электропривода | |||
| - Л.: Энергоатомиздат, 1983, с | |||
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
