(54) СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления шаговым приводом | 1979 |
|
SU989734A1 |
| Приемное устройство электронного телеграфного аппарата | 1978 |
|
SU767997A2 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором и устройство для его осуществления | 1987 |
|
SU1515323A1 |
| Устройство для управления шаговым двигателем | 1974 |
|
SU552913A3 |
| Устройство для сварки давлением | 1985 |
|
SU1234110A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Устройство для управления электродвигателем переменного тока | 1985 |
|
SU1312713A1 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
| Устройство для программного управления | 1979 |
|
SU911470A1 |
I
Изобретение относится к шаговому электроприводу., может быть использовано, в частности, в прецизионных системах познционирования рабочих органов исполнительных механизмов.
Известен способ управления шаговым двигателем, обеспечивающий ступенчатое изменение цены шага 1.
Этот способ не позволяет плавно регулнровать шаг, что ограничивает его применение.
Наиболее близок к предлагаемому способ управления шаговым двигателем путем одновременной подачн на прямой н обратный входы коммутатора двух сдвннутых по фазе управляющих частот {2J.
Такой способ управления обеспечнвает коммутацню фаз двигателя лнбо с высокой частотой, что прнводнт к снижению КПД, либо с низкой, что может привести к потере устойчивости движенНя.
Цель изобретения - повышенне КПД н устойчивости работы шагового двигателя.
Указанная цель достнгается тем. что для сдвнга частот по фазе одновременно повышают одну яз ннх н понижают другую
Такой способ управлення шаговым двигате.лем позволяет при требуемой плавностн двнження увелнчнть шаг двигателя, зависяш,ий от
частоты переключения коммутатора, т. е. от опорной частоты, обеспечивая тем самым мннимальную частоту коммутации, что повышает КПД устройства.
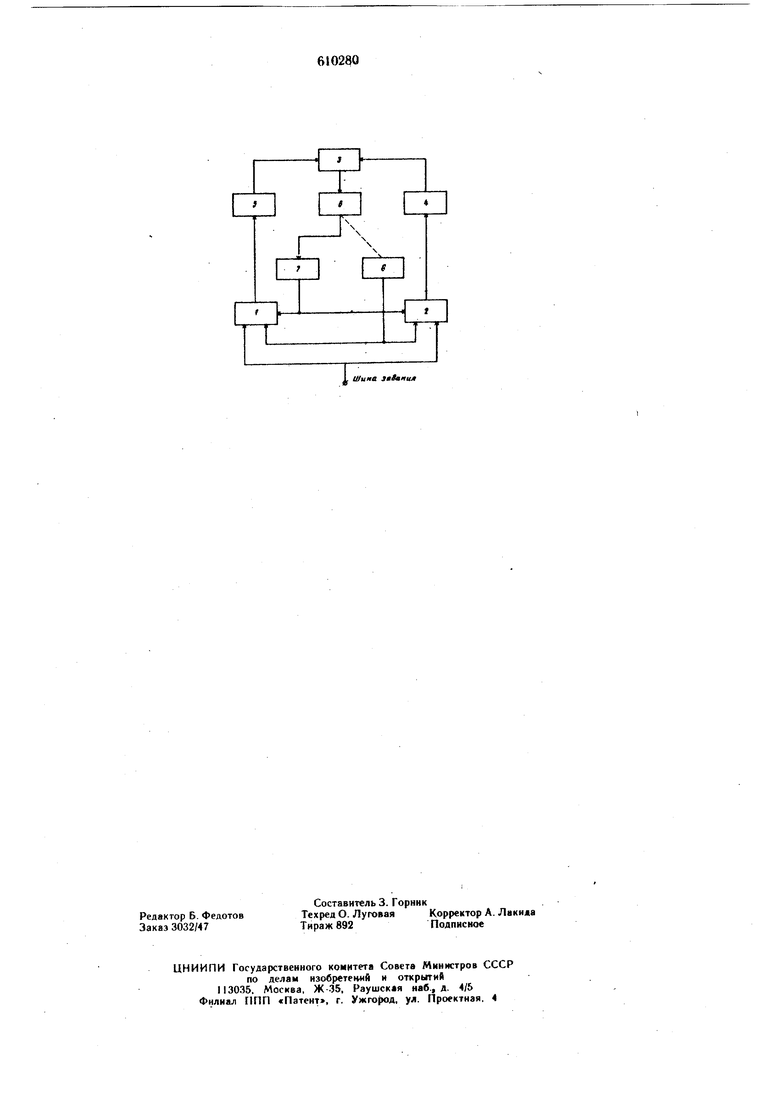
На чертеже приведена структурная электрнческая схема устройства для управления шаговым двигателем предлагаемым способом.
Трехвходовые сумматоры 1 и 2 соединены выходами соответственно с прямым и обратным входами коммутатора 3 через управляемые генераторы 4 и 5. Выходной вал шагового двигателя 6 соединен с датчиком частоты враш.ения 7, выход которого соединен с прямымн входамн сумматоров 1 и 2. Инверсный вход сумматора 1 соединен с другим прямым входом сумматора 2нс выходом датчнка обратной связи 8, а инверсный вход сумматора 2 соединен с прямым входом сумматора 1 н с шнной задания.
Устройство работает следующим образом.
Датчик частоты вращения 7 вырабатывает опориый сигнал Uo, велнчнна которого зависит от частоты вращення шагового двигателя 6. Одним из управляющих, сигналов является сигнал и на выходе датчика обратной связи 8 следящей системы, а другим - управляющий сигнал на шине задання Ug.
В исход состоянии Jf Uj ,
а на выходе датчика 7 имеется сигнал Ue.
этом на выходах сумматоров I и 2 реализуются сигналы
X,
и«
поступающие на идентичные генераторы управляемой частоты 4 и 5, частоты которых пропорциональны входному сигналу. Величина сигнала на выходе датчика частоты вращения 7 задается таким образом, чтобы частоты, реалнзуемые на выходах генераторов 4 и 5 в исходном состоянии, которым является режим фиксации ритора, были равны
ft) I «)2 /CvJo Wo.
Рде 1 - управляющая частота на прямом
входе коммутатора 3; yj. -управляющая частота на обратном входе коммутатора; К -- коэффициент пропорциональности генераторов,
н удовлетворяли условию устойчивости. Таким образом, в исходном состоянии на входы коммутатора 3 поступают одинаковые частоты, в результате чего щаговый двигатель 6 находится в режиме фиксации и по его обмоткам протекают токи, определяемые выражением (для двухфазного лпнгателя с четырехконтактным коммутатором)
i л 1 „ - 0.05
1 1 l«t
где J. - угол сдвига сигналов частот oi,
и .
При рассогласовании между сигналами датчика 8 и задания на вьгходах сумматоров 1 н 2 реализуются сигналы
;г, Uo-f (U,-U,); Xi Uo -(U,-Ц).
изменяющие частоты генераторов 4 и 5 согласно выражениям
о,, /C(Uo + (и,-Ц);
„, KjUo-(U,-и, )). Эти частоты, поступающие на входы коммутатора 3, приводят щаговый двигатель 6 во вращение с частотой
,-У.«
И при-любых изменениях сигналов U. и U, При удовлетворяют условию
,li:iiii)li.
«л
(«j, t- jT
I« COS 4
4
(w.
u,) t r
1
31 lчастота переключения коммутатора 3
т. e. ft)i + (oj 2/CUo 2wo определяется „
только скоростью вращения двигателя. Следовательно, частота переключения элементов коммутатора 3 всегда минимально необходима, что повыщает КПД двигателя, а также надеж-, ность и устойчивость его работы.
Приведенный способ позволяет управлять и серийно выпускаемыми двигателями переменного тока, например синхронными двнгателями, асинхронными двигателями с фазным ротором, однофазными и дифференциальными сельсинамн и т. п.
Описанный способ позволяет также управлять двигателем при помощи аналоговых сигналов, для чего вместо опорной н управляющих частот используют опорный н управляющий аналоговые сигналы, пропорциональные им, а частоты на входах коммутатора получают путем преобразования сигналов суммы и разности между опорным сигналом и разностьк) управляющих сигналов.
Формула изобретения
Способ управления щаговым двигателем путем одновременной подачи на прямой и обратный входы коммутатора двух управляющих частот с предварительным сдвигом их по фазе, отличающийся тем, что, с целью повышения КПД и устойчивости работы двигателя, для сдвига частот по фазе одновременно повышают одну из них и понижают другую.
Источники информации, принятые Во внимание при экспертизе:
Шыяв лв/аяи
