(54) УСТРОЙеТЮ ДЛЯ ПЮГРАММНОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1977 |
|
SU684507A2 |
| Фазовая следящая система с комбинированным управлением | 1978 |
|
SU746423A1 |
| Следящий привод | 1977 |
|
SU682871A2 |
| Фазоимпульсное устройство программного управления | 1973 |
|
SU485416A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Следящий электропривод с компенсацией люфта | 1974 |
|
SU535550A1 |
| Преобразователь кода в угловое положение вала | 1983 |
|
SU1088048A1 |
| Устройство для программного управления шаговым двигателем | 1983 |
|
SU1141378A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1341620A1 |
| Устройство для программного управления | 1980 |
|
SU903811A1 |

. 1- -: :
Изобретение относится к автоматике, а именно к программному управлению станками, и предназначено для повышения тоянос-га обработки деталей.
В программном управлении станками нашли широкое применение шаговые системы программного управления. Одной из них является шаговая система программного управления, содержащая источник многокаиадьного задают программы и по каждому каналу выходной силовой усилитель, подклнь ченный к соответствуюшему входу шагового двигателя координаты 1.
Наиболее близкой к предлагаемой является шаговая система программного управления с автоматической коррекцией от упругих деформаш1й, которая также содержит узел задания программы, усилители, ишговый двигатель, фазовые дискриминаторы, систему. СПИД, к выходам которой подключены датчики погрешностей, дополнительные выходные усилители, дополнительные шаговые двигатели, устройство суммирования углов
поворота, вьшолнешюе в виде механического дифференциала {2..
Эти системы имеют недостаточную точность коррекции, ограниченную качеством изготов; леш1Я механического дифференциала. Цель изобретения - повышение точности коррекщш.
Поставленная цель достигается тем, что в устройство для программного управления,
IQ содержащее задатчик программы, выходы которого соединены со входами первого преобразователя кода, датчик погрешностей, фазовый дискриминат ф, первый сумматор и второй преобразователь кода, соединенный
и через усилители с шаговым двигателем, введены последовательно соединенные геиератор зталонной частоты, первый делитель частоты и второй делитель частоты, последовательно соединенные утфавляемый генератор частоты,
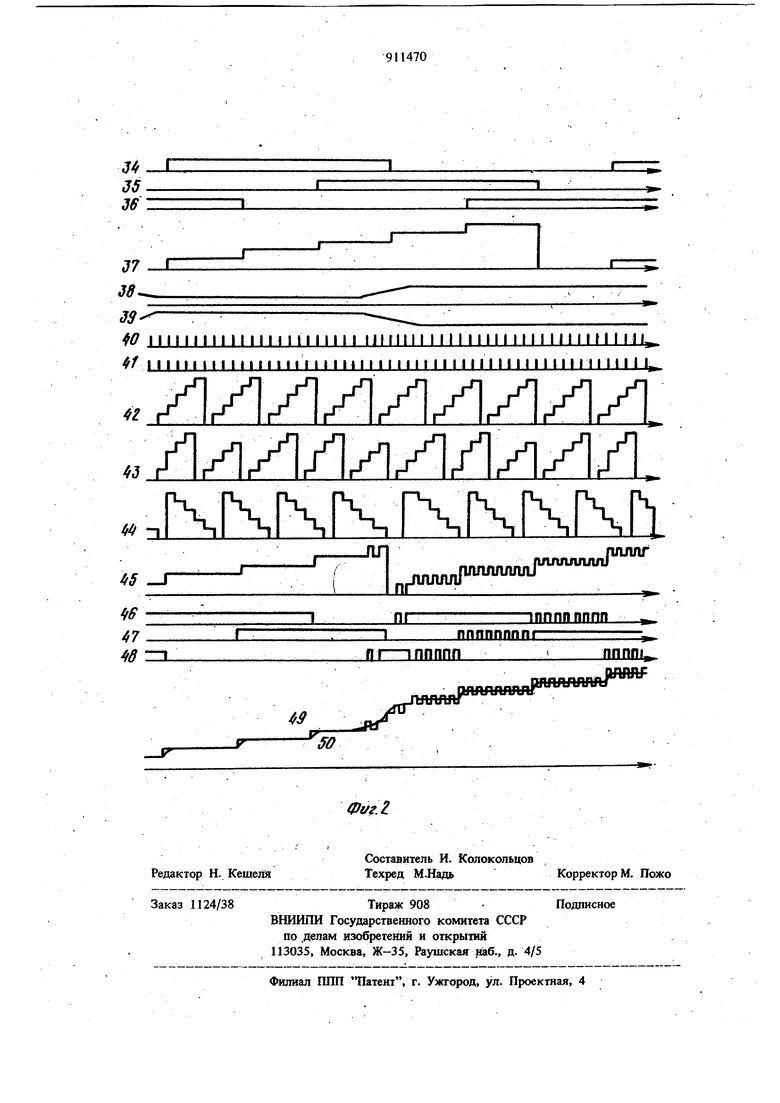
20 третий делитель частоты и четвертый д литель частоты, а также второй сумматор, входами подключе1шый к выходу первого преобразователя кода и ко второму выходу q I первого делителя частоты, а выходом - к 39 первому входу первого сумматора, второй вход и выход которого соединены соответственно со вторым выходом третьего делителя частоты и со входом второго преобразователя, кода, причем первый вход управляемого генератора частоты подключен, к выходу датчика погрешностей, а второй вход - к выходу фазового дискриминатора соединенного входами с выходами второго и четвертого делителей частоты. На фиг. 1 приведена блок-схема устройства для двух координат; на фиг. 2 - временная диаграмма работы одной координаты устройства Устройство содержит задатчик 1 программы, имеющий три канала на каждую коорданату, усилители 2-4 и 5-7, подключенные к шаговым двигателям 8 и 9 соответственно. Двигатели 8 и 9 через систему 10 СПИД связаны с Датчиками 11 и 12 погрешностей. Входы первых преобразователей 13 и 14 кода (из комбинационного в двоичный) подключены к каналам задатчика 1, а вьгходь - ко входам вторых qjTMMaTopoB 15 и 16 соответственно, вторые входы которых подключены к первым выходам первых делителей 17 и 18 частоты соответственно. Выходы сумматоров 15 и 16 подключены ко входам первых сумматоров 19 и 20 соответственно, вторые входы которых подключены к первым выходам третьих делителей 21 н 22 частоты соответственно. Выходы сумматоров 19 н 20 подключены ко входам вторых преобразователей 23 и 24 кода (из двоичного в комбинащюнный) соответственно, выходы которых подключень к усилителям 2-4 и 5-7 соответственно. Выходы генератора 25 эталонной частоты подключены ко входам делителей 17 и 18 соответственно, вторые выходы которых через вторые делители 26 и 27 частоты подключены к первым входам фазовых дискриминаторов 28 и 29 соответственно. Выходы датчиков 11 и 12 подключены ко входам управляемых генераторов 30 и 31 частоты соответственно, выходы которых через делители 21 и 22 подключены ко входам четвертых делителей 32 и 33 частоты соответственно. Выходы делителей 32 и 33 подключены ко вторьпи входам дискриминаторов 28 и 29 соответственно, выходы которых подключены ко вторым входам генераторов 30 и 31 соответственно. Устройство работает следующим образом. : С выходов задатчика 1 сигналы 34-36, определяющие запрограммированные углы поворота двигателя 8 в комбинационном коде, поступают на входы преобразователя 13, где они преобразуются в сигнал 37, определяющий запрограмированные углы поворота двигателя 8 в двоичном коде. С выхода датчика 11 на вход генератора 30 поступает аналоговый сигнал 38. На второй вход генератора 30 с выхода дискриминатора 28 поступает аналоговый сигнал 39, пропорциональный разности фаз между сигналами на входе дискриминатора 28. Разность сигналов 38 .и 39 управляет частотой, а следовательно, н фазой выхошюго сигнала 40 генератора 30. Снгналы 40 н 41 с выходов генератора 30 и 25. соответственно через делители 21, 32 и 17, 26 соответственно поступают на входы дискриминатора 28, где формируется сигнал 39, пропорциональный разности фаз- между сигналами на входах дискриминатора 28. Так как прд делении частоты сигнала делится и фаза зтого сигнала,. разность фаз между сигналами на входах дискриминатора 28 пр.опорциональна разности фаз между сигналами 40 и 41 на выходах генераторов 30 и 25. Поэтому управление частотой генератора 30 выполняется дО тех пор, пока разность фаз между сигналами 40 и 41 не окажется пропорциональной сигналу 38. Деление сигналов 40 и 41 делителями 21, 32 и 17, 26 сопровождается изменением чисел в зтих делителях, причем разность фаз между сигналами 10 и 41 пропорциональна усреднершю разности между числами в делителях. Отсюда следует, что усредненная разность между числами в делителях 17 и 21 пропорциональна разности фаз между сигналами 40 и 41. Таким образом, усредненная разность между чнсламн в делителях 17 и 21 пропорциональна аналоговому сигналу 38. , С первого выхода делителя 17 на второй вход сумматора 15 поступает сигнал 42, несущий информацию о числе в делителе 17. В результате суммирования сигналов 37 и 42 в делителе 15 формируется сигнал 43, несущий информацию о запрограМированном угле поворота двигателя 8 но числе в делителе 17. Сигнал 43 поступает на вход сумматора: 19. На второй вход зтого сумматора с первого выхода делителя 21 поступает сигнал 44, Несущий информацию о числе в зтом делителе, представленном, в обратном коде. В результате суммирова ння сигналов 43 и 44 в сумматоре 19 формируется сигнал 45, несущий информацию о запрограмированном угле поворота двигателя 8 и разности чисел в делителях 17 и 21. Сигнал 45 поступает на вход преобразователя 23, где информация этого сигнала преобразуется из двоичного кода в комбинациоиный, представленный сигналами 46-48. Эти сигналы усиливаются усилителями 2-4 соответственно и поступают на входы двигателя 8, где они преобразуются в углы 49 поворота двигателя 8. Благода ря сглаживающему действию двигателя 8 усредняется информация о разности между числами в делителях 17 и 21 и демпфируются скачки. Позтому углы 49 после сглаживания преобразуются в углы 50. Углы 50 можно представить суммой сглаживаемы программных углов и сглаженных углов, пропорциональных аналоговому сигналу 38, поступающему от датчика 11. Таким .образом, щаговый двигатель 8 отрабатывает программные углы и аналоговые корректируннцие сигналы. Использование предлагаемого устройства позволит повысить точность коррекции за счет исключения из каналов коррекции дополннтельньрс щаговых двигателей и. механических дифференциалов, вносящих погрещности квантования, инструментальные погрещНости изготовления механических дифференциалов и погреишости от люфтов в дифференциалах. Кроме того, применение слаботочных электронных устройств, в основном триггеров и логических схем, в сравнении с имеющимися в известном устройстве сило ыми электронными устройствами - допол|нительными выходными силовыми уошителями, дополнительньпмги щаговыми двигателями и механическими дафференциалами, при современном, уровне развития микроэлектроиики и тенденции к удещевлешш иитегральных микросхем выгодно отличает предла гаемую систему по габаритам и стоимости. Кроме того, реализация предлагаемого уст-,. ройства проще, так как не требует доработки механики станка. Формула изобретения Устройство для программного управления, содержащее задатчик црограммы, выходы которого соединены со входами первого преобразователя кода, датчнк погрешностей, фазоаьш дискриминатор, первый сумматор и вторш преобразователь кода, соеданенный через усилнте/ш с щаговым двигателем, о тличающееся тем, что, с целью повыщения точности устройства, в него введены последовательно соединенные генератор эталонной частоты, первьш делитель частоты и второй делитель частоты, последовательно соединенные управляемый генератор частоты, третий делитель частоты и четвертый делитель частоты, а также второй сумматор, входами подключешпл к выходу первого преобразователя кода и к в,торому выходу первого делителя частоты, а выходом - к первому входу первого сумматора, второй вход и выход которого соединены соответственно с вторым выходом третьего делителя частоты и с входом второго преобразователя кода, причем первь1Й вход управляемого генератора частоты подключен к выходу датчика погреишостей, а второй вход - к выходу фазового диск{жминатора, соединенного входами с выходами второго и четвертого делителей частоты. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N 182476, л/G 05 G 21/00, 1964. 2.Авторское свидетельство СССР № 189064, л. G 05 В 11/00, 1965 (прототип).
Ф&г. /
Л-L
j(zi:
