уравновешенности и неуравновешенности с пробными грузами измеряют в момент совПадения кеток на двух роторах.
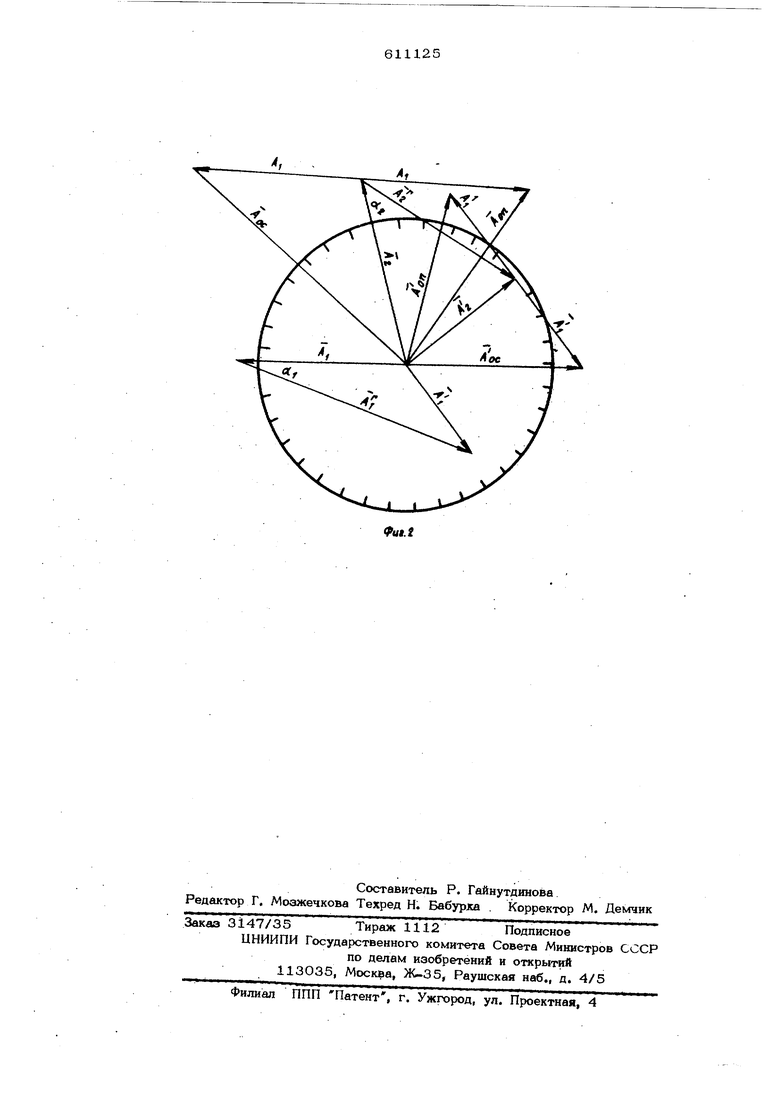
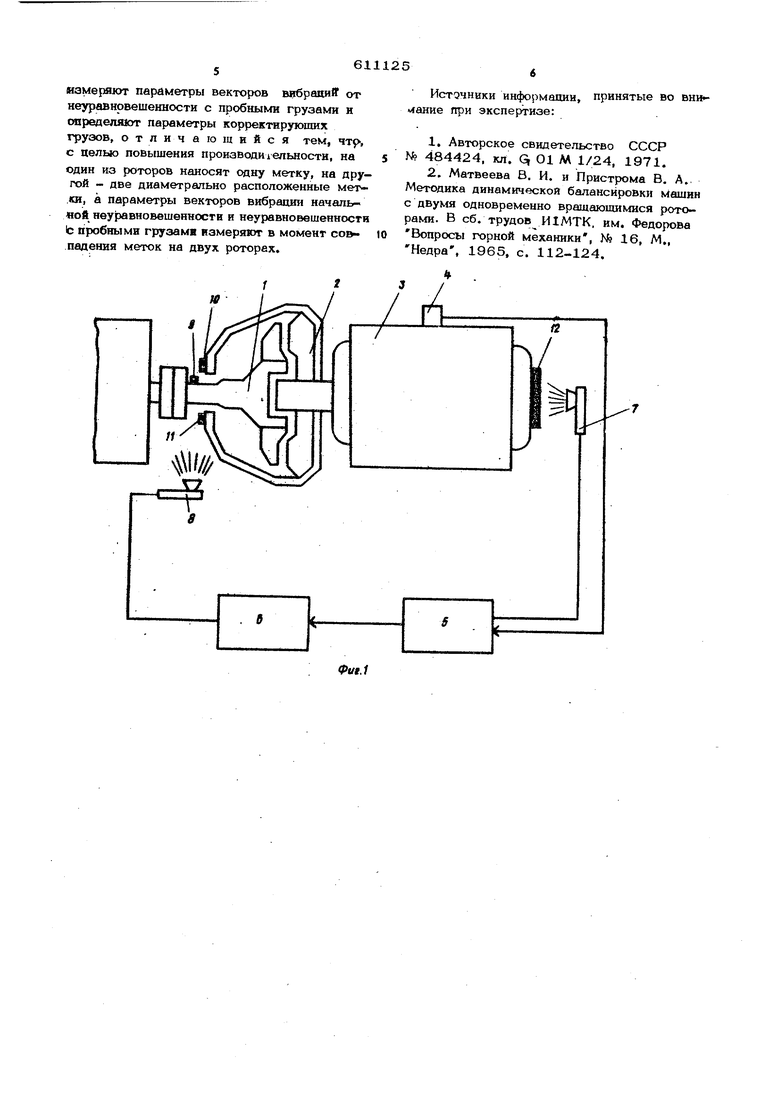
На (}91Г. 1 изображена схема устройства Поясняюшая предлагаемый способ; на фиг, 2 Ьекторнаи диаграмма для определения Бели-« чины корректирукадих грузов и места их расположения.
На схеме показаны балансируемые роторы 1 и 2 в сборе, приводной двигатель 3, датчик 4 вибрации, соединенный с двигателем 3, соединенные мелоду собой измерительные приборы 5 и 6, выход прибора 5 связан со строболамной 7, а выход прибора 6 связан со строболампой 8.
В доступных для наблюдения местах на роторе 1 наносится одна метка 9, а на ро торе 2 - две диаметрально расположенные метки Ю и 11, отличающиеся между со- , бой формой или цветом. У входа одного из валов когшентрично с ним укрепляется неподвижная шкала 12, а на торце вала приводного двигателя 3 наносится радиальная метка для Езмерения фазы вибраш1Й навеетным способом с помошыо строболампы 7.
Вибрация машины, возникающая при ее работе, преобразуется датчиком 4 .вибрации в электрический сигнал, пропордиона/шный величине неуравновешенности, который подается на вход измерительного прибора 5 и Далее на вход измерительно) прибора 6.
Способ осугдествляют сле;;уго.ш.им спрсобо При работе машины с рючальиой неуравновешенностью прибором 5 измерй от ампяи- туду, а строболампой 7 фазу вектора вибрации А Q(. в момент, когда метка 9 на роторе 1 совпадает с меткой 1О на роторе 2. Затем в момент совпадешш метки на роторе 1 со второй меткой 11 произво- дят измерение амплитуды и фазы вектора вибрашш А Oft t Наблюдение за перемещением меток и моментом их совпадения производят визуально с помощью строболампы
В результате таких двух, измерений век- тор вибрации от неуравновешенности ротора 2, относительно.которопо производится из- мнение фазы вибрации, не изменяет своего направления, а вектор вибрации ротора 1 пов фачивается на 18О „ Следовательно, отреарк, соединяющий концы векторов AQC AQJI , является удвоенным значением вектора вибрации от начальной неуравновешенности ротора 1 - вектор Д вектор Д2, проведенный из центра диаграммы к середине отрезка, является вектором вибра иии от начальной неуравновешенности ротора 2.
После укрепления в произвольных местах роторов 1 я 2 известных пробных грузов
М и АЛ 2 производится второй пуск машины и аналогичным образом измеряют векторы вибрации А о„. Принтом отрезок, соединяющий концы векторов Алл и
Lon
;1яется удвоенным значением вектора виб радии от наче 1ьной неуравновешенности ро- тора 1 и укрепленного на нем известного пробного груза М (векторы , на 4иг. 2) а вектор AJ проведенный из центра диаграммы к середине отрезка, представляет собой вектор вибрации от начальной неуравновешенности ротора 2 и укрепленного на нем известного пробного груза Mj. « Полученный построением вектор является вектором влияния от пробного гру;за М 2 .: Следовательно, для уравновешивания ротора 2 следует на нем вместо пробного груза М2под углом ct установить
Mg . Направлекорректирующий груз
j /А 2J
oCjf устанавливается согraie отсчета утла ласно известным правилам для стробоскоп и-Ь ческого способа измерения фаз вибраций.
С целью удобства расчета корректирующего груза для ротора 1 осуществляется . парцеллельный перенос векторов A -AogAg в центр диаграммы. Тогда полученный построением вектор л | А1 -А представляет собой вектор влияния от проб ного груза М . Следова1тельно, корректиру Д 1
ющий груз для ротора 1 равен гтгт торый необходимо укрепить под yfлoм относительно пробного груза М Середе- ление вектора влияния Д можно также осуществить путем параллельного переноса в центр диаграммы векторов wA
А
-
on
Указанный способ балансировки двух ро-. торов в сборе способствует повышению про изводительности за счет возможности проведения балансировочных работ непосредртвенно. на MiecTe их установки, когда исследуемые колебания машин являются результатом однобременаого действия двух центробежных сил неуравновешенных масс, принадлежащих двум различным рр.торам, и аа счет возможности использования широко распространенной балансировочной аппаратуры, в связи с чем минимальна, затрата времени на подготовительные и наладочные работы.
Формула изобретения
Способ балансировки двух роторов в сборе, заключающийся в том, что измеряют параметры векторов вибрации при начальной неуравновешенности каждого ротора, на каж |Дый ротор устанавливают пробные грузы.
измеряют параметры векторов врбраций от неуравновешенности с пробнымн грузами и определ5иот параметры корректирующих грузов, отличающийся тем, чтр, с целью повышения проиаводи4ельности, на
один из роторов наносят одну метку, на другой - две диаметрально расположенные метки, а параметры векторов вибрацни началь«oft неу1эавноввшенности и неуравновешенности Ь пробными грузами измеряют в момент со&падения меток на двух роторах.
Источники информации,
принятые во вни «такие при экспертизе:
1.Авторское свидетельство СССР № 484424, кл. Q О1 М 1/24, 1971.
2,Матвеева В. И. и Пристрома В, А.. Методика динамической балансировки Машин с двумя одновременно вращающимися роторами. В сб. трудов И1МТК. им. Федорова
Вопросы горной механики , № 16, М., Недра, 1965, с. 112-124.
/
//
--г I
LA

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2018 |
|
RU2694142C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2012 |
|
RU2499985C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА ЦБН, ОСНАЩЕННОГО СИСТЕМОЙ МАГНИТНОГО ПОДВЕСА, В СОБСТВЕННЫХ ОПОРАХ | 2021 |
|
RU2803403C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
| Способ балансировки ротора газоперекачивающего агрегата | 2017 |
|
RU2658597C1 |
| СПОСОБ СНЯТИЯ ПОКАЗАНИЙ С ФАЗООТМЕТЧИКА ПРИ БАЛАНСИРОВКЕ ГАЗОПЕРЕКАЧИВАЮЩЕГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2818502C1 |
| Способ динамической балансировки ротора в двух плоскостях коррекции | 2022 |
|
RU2790897C1 |
| СПОСОБ ОЦЕНКИ ДИСБАЛАНСА РОТОРА | 1989 |
|
RU2010205C1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ВОЗДУШНО-ВИНТОВОГО АГРЕГАТА СИЛОВОЙ УСТАНОВКИ НА САМОЛЕТЕ | 1992 |
|
RU2039958C1 |