Известны двухстепенные гироскопы, измеряющие угловую скорость объекта, содержащие гироузел и электрическую обратную связь [1, с.8]. При этом гироузел выполнен [1, с.31] в виде синхронного гистерезисного двигателя (СГД) с газодинамическими опорами. Как и все синхронные машины, ротор СГД имеет низкочастотные качания относительно магнитного поля статора и которые измеряются бесконтактными способами [1, с.134-137], [2].
Недостатком двухстепенных гироскопов является отсутствие компенсации погрешности от влияния углового ускорения объекта. Дифференцирование измеряемой угловой скорости для получения углового ускорения и дальнейшая компенсация обусловленного им дрейфа вызывает усиление высокочастотных измерительных шумов. Методы коррекции погрешностей, обусловленных влиянием угловых ускорений по показаниям блока датчиков угловых ускорений, являются сложными и дорогими.
Известен трехкомпонентный измеритель угловой скорости [3], содержащий первый, второй и третий датчики угловой скорости с взаимно перпендикулярными осями, первый, второй и третий трехвходовые сумматоры, первый, второй и третий, четвертый, пятый и шестой инвертирующие усилители. При этом первый вход первого, второго и третьего трехвходового сумматора связан с выходом первого, второго и третьего датчика угловой скорости. Входы первого и второго инвертирующих усилителей соединены с выходом первого датчика угловой скорости, выходы третьего и четвертого инвертирующих усилителей соединены с выходом второго датчика угловой скорости, выходы пятого и шестого инвертирующих усилителей соединены с выходом третьего датчика угловой скорости. Второй и третий входы первого трехвходового сумматора соединены с выходом третьего и пятого инвертирующих усилителей, второй и третий входы второго трехвходового сумматора соединены с выходом первого и шестого инвертирующих усилителей, второй и третий входы третьего трехвходового сумматора соединены с выходом второго и четвертого инвертирующих усилителей. Коэффициент усиления каждого из инвертирующих усилителей зависит от степени влияния угловой скорости, измеряемой тем датчиком угловой скорости, выход которого соединен с первым входом трехвходового сумматора, другой вход которого соединен с выходом инвертирующего усилителя.
В устройстве компенсируют погрешности, вызванные влиянием перекрестных угловых скоростей. Коэффициент усиления каждого из инвертирующих усилителей, зависит от степени влияния угловой скорости, измеряемый тем датчиком угловой скорости, выход которого соединен с входом инвертирующего усилителя, на датчик угловой скорости, выход которого соединен с первым входом трехвходового сумматора, другой вход которого соединен с выходом инвертирующего усилителя.
Недостатком двухстепенных гироскопов является отсутствие компенсации погрешности от влияния углового ускорения объекта.
Наиболее близким по технической сущности из числа известных технических решений является трехкомпонентный измеритель угловой скорости [4], содержащий первый, второй и третий датчики угловой скорости с взаимно перпендикулярными измерительными осями первый, второй и третий трехвходовые сумматоры, первый, второй, третий, четвертый, пятый и шестой инвертирующие усилители, причем первый вход первого трехвходового сумматора соединен с выходом первого датчика угловой скорости, первый вход второго трехвходового сумматора соединен с выходом второго датчика угловой скорости, первый вход третьего трехвходового сумматора соединен с выходом третьего датчика угловой скорости, входы первого и второго инвертирующих усилителей соединены с выходом первого датчика угловой скорости, входы третьего и четвертого инвертирующих усилителей соединены с выходом второго датчика угловой скорости, входы пятого и шестого инвертирующих усилителей соединены с выходом третьего датчика угловой скорости, второй и третий входы первого трехвходового сумматора соединены с выходом третьего и пятого инвертирующих усилителей, второй и третий входы второго трехвходового сумматора соединены с выходом первого и шестого инвертирующих усилителей, второй и третий входы третьего трехвходового сумматора соединены с выходом второго и четвертого инвертирующих усилителей.
В устройстве компенсируют погрешности, вызванные влиянием угловой скорости основания на начальные положения осей собственного вращения гироскопических датчиков угловой скорости. Погрешности из-за влияния угловых ускорений объекта не компенсируются.
Задачей заявленного изобретения является повышение точности измерения параметров движения трехкомпонентным датчиком угловой скорости за счет компенсации погрешностей, обусловленных угловым ускорением объекта.
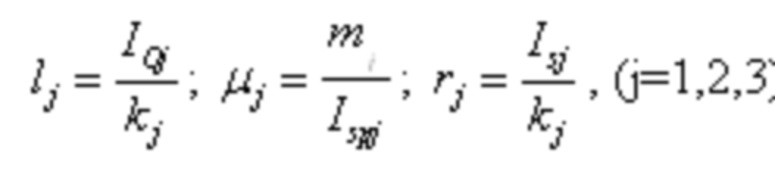
Задача достигается тем, что в трехкомпонентный измеритель угловой скорости, содержащий три датчика угловой скорости с датчиками моментов в обратных связях, с взаимно перпендикулярными измерительными осями и осями собственного вращения, три трехвходовых сумматора, шесть инвертирующих усилителей, причем первые входы трехвходовых сумматоров соединены с выходами соответствующих датчиков угловой скорости, введены три измерителя угловых качаний роторов, выходы первого из которых соединены через первый инвертирующий усилитель со вторым входом первого трехвходового сумматора, а через пятый инвертирующий усилитель с третьим входом второго трехвходового сумматора, выходы второго измерителя качания ротора связаны через посредство второго инвертирующего усилителя со вторым входом второго трехвходового сумматора, а через посредство шестого инвертирующего усилителя с третьим входом трехвходового сумматора, выход третьего измерителя качания ротора соединен через посредство третьего инвертирующего усилителя со вторым входом трехвходового сумматора, а через посредство четвертого инвертирующего усилителя связан с третьим входом первого трехвходового сумматора. Коэффициенты инвертирующих усилителей имеют вид:
а скорректированный ток датчиков моментов имеет вид:
где ij (s), IO, IS, ISP, k, m, 

где X,Y,Z - измерительные оси трехкомпонентного измерителя угловой скорости; 


При разомкнутой связи первых входов трехвходовых сумматоров с соответствующими измерителями угловой скорости, выходы трехвходовых сумматоров подключены к дополнительным обмоткам датчиков моментов, соответствующих измерителей угловой скорости.
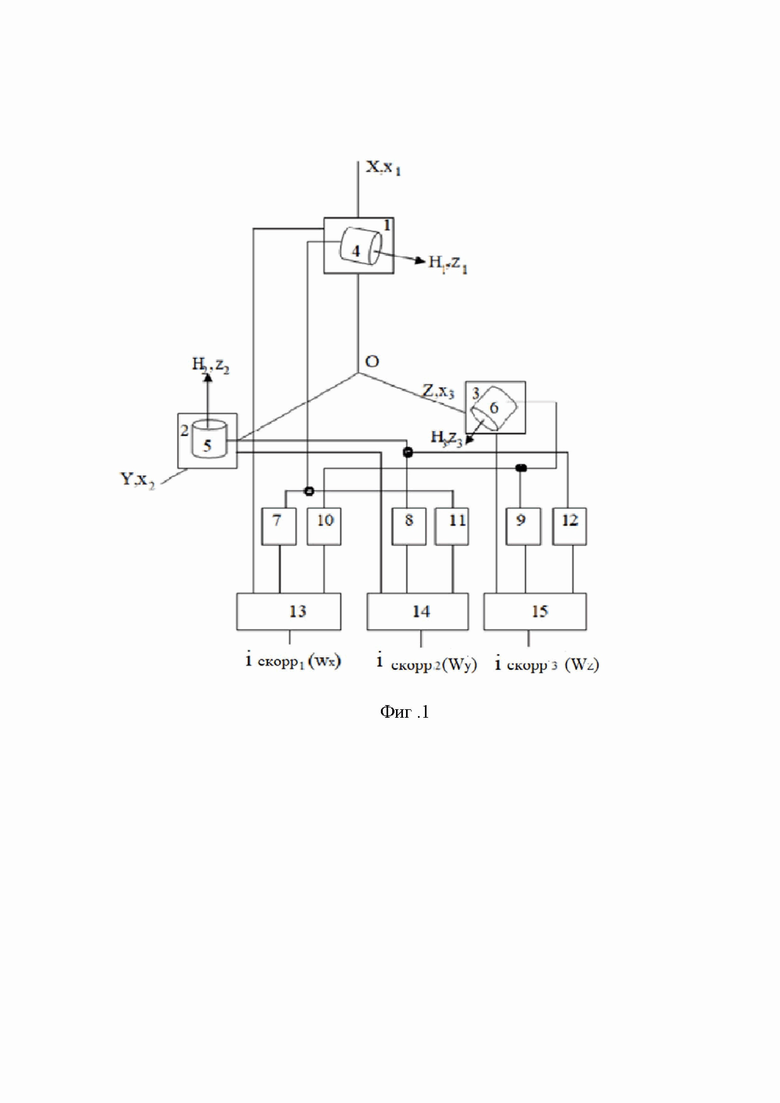
На фиг.1. изображен трехкомпонентный датчик угловой скорости с измерительными осями X, Y, Z, в котором выходные сигналы сформированы по разомкнутой схеме. Скорректированные от влияния углового ускорения объекта сигналы могут поступать в бортовой вычислитель объекта.
На фиг.2. изображен трехкомпонентный датчик угловой скорости с измерительными осями X, Y, Z, в котором выходные сигналы сформированы по замкнутым обратным связям. Корректирующие электрические сигналы поступают на дополнительные обмотки датчиков моментов каждого датчика угловой скорости.
На фиг.1 и фиг.2. изображены: 1, 2, 3 - первый, второй и третий датчики угловой скорости, измерительные оси которых x1, x2, x3, а также оси собственного вращения z1 ,z2, z3 взаимно перпендикулярны и направлены по измерительным осям трехкомпонентного датчика угловой скорости; 4,5,6 - первый, второй и третий измеритель качания ротора; 7, 8, 9, 10, 11, 12 - первый, второй, третий, четвертый, пятый и шестой инвертирующие усилители; 13, 14, 15 - первый, второй и третий трехвходовые сумматоры.
Выходы первого измерителя угловых качаний роторов 4 соединены через первый инвертирующий усилитель 7 со вторым входом первого трехвходового сумматора 13, а через пятый инвертирующий усилитель 11 - с третьим входом второго трехвходового сумматора 14, выходы второго измерителя качания ротора 5 связаны через посредство второго инвертирующего усилителя 8 со вторым входом второго трехвходового сумматора 14, а через посредство шестого инвертирующего усилителя 12 с третьим входом трехвходового сумматора 15, выход третьего измерителя качания ротора 6 соединен через посредство третьего инвертирующего усилителя 9 со вторым входом трехвходового сумматора 15, а через посредство четвертого инвертирующего усилителя 10 связан с третьим входом первого трехвходового сумматора 13.
На фиг.1. первые входы трехвходовых сумматоров соединены с выходами соответствующих датчиков угловой скорости. На фиг.2. эта связь отсутствует, а выходы трехвходовых сумматоров соединены с дополнительной обмоткой датчика моментов, соответствующих датчиков угловой скорости.
Дадим теоретическое обоснование данному техническому решению.
Для следующей ориентации осей:
где X,Y,Z - измерительные оси трехкомпонентного измерителя угловой скорости;
Уравнения движения трехкомпонентного измерителя угловой скорости запишем в виде:
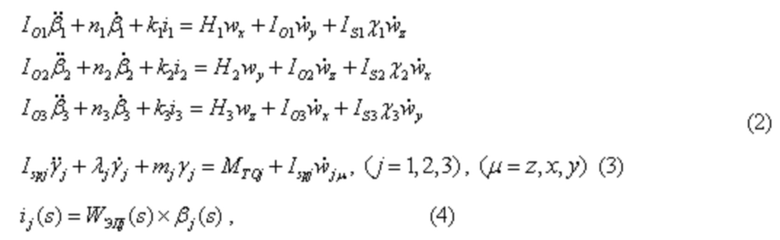
где IO, IS, 




ISP,


Компоненты вектора углового ускорения объекта проецируются на выходные оси датчика угловой скорости и, при наличии неортогональности осей 
Газодинамические опоры имеют малый момент трения (


поэтому моментом трения в опорах можно пренебречь, и угол качания ротора пропорционален ускорению на оси собственного вращения:

где 
Ось собственного вращения ротора каждого измерителя угловой скорости направлена по одной из осей трехгранника объекта: z1 по Z, z2 по X, z3 по Y.
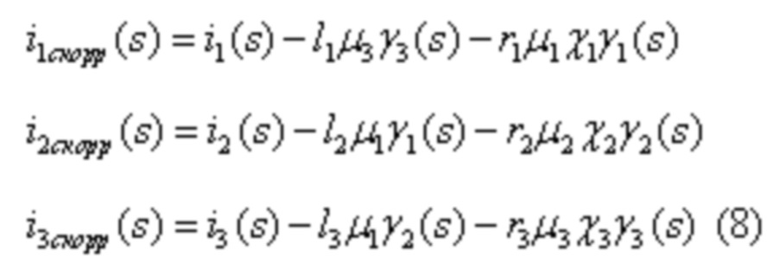
На выходах трехвходовых сумматоров на фиг.1. формируются скорректированные сигналы измерителей угловой скорости без погрешностей, обусловленных влиянием углового ускорения объекта:
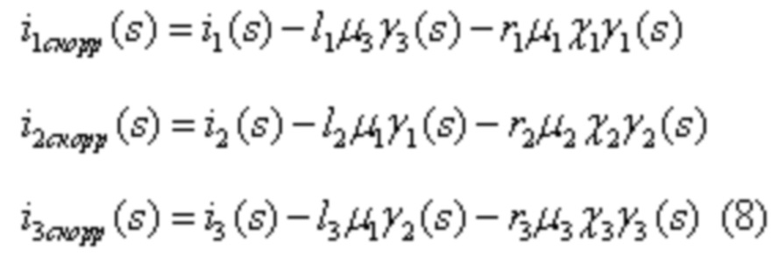
где
Если разорвать связь первых входов трехвходовых сумматоров с измерителями угловой скорости, а выходы трехвходовых сумматоров связать с дополнительными обмотками датчиков моментов соответствующих измерителей угловой скорости, как показано на фиг.2, то компенсация отмеченных погрешностей будет не в бортовом вычислителе, а в самих измерителях угловой скорости.
Коэффициент усиления каждого из интегрирующих усилителей устанавливается в соответствии с алгоритмом (8).
Приведем пример. Пусть параметры всех датчиков угловой скорости идентичны друг другу, компоненты вектора углового ускорения составляют [5,6]: IO= 1 сНсм с2: IS=0,1 сНсмс2, ISP=0,02 сНсмс2; m =10 сН/рад; k=104 сН/А;
Список использованных источников.
1. Гиродвигатели. Под редакцией Орлова И.Н.-М. Машиностроение. - 1983. С 8, 31, 134-137.
2. А.с. №1337677. Устройство для определения момента на валу синзронного гиродвигателя. Б.И. №34. 1987.
3. Заявка на изобретение № 2004133601. Трехкомпонентный измеритель угловой скорости. Опуб. 10.04.2006.
4. Патент на ИЗ № 2273858. Трехкомпонентный измеритель угловой скорости. Опуб. 27.04.2006.
5. Климов Д.М., Харламов С.А. Динамика гироскопа в кардановом подвесе. -М.Наука.-1978.
6. Рулева Л. Б. Применение метода наблюдающих устройств для гироскопических измерителей//Физико-химическая кинетика в газовой динамике. 2010. Т. 9. http://chemphys.edu.ru/issues/2010-9/articles/153/.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехкомпонентный измеритель угловой скорости | 2024 |
|
RU2828994C1 |
| ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2273858C1 |
| ТРЕХКОМПОНЕНТНЫЙ СТРУЙНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2017 |
|
RU2654308C1 |
| Моментный электродвигатель постоянного тока с ограниченным углом поворота | 1990 |
|
SU1757038A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2002 |
|
RU2210780C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА | 2012 |
|
RU2499984C1 |
Изобретение относится к области измерительной техники, а именно к области измерения параметров движения объекта, и может быть использовано в бесплатформенных инерциальных навигационных системах. Трехкомпонентный датчик угловой скорости содержит три датчика угловой скорости с датчиками моментов в обратных связях с взаимно перпендикулярными измерительными осями и осями собственного вращения, три трехвходовых сумматора, шесть инвертирующих усилителей, причем первые входы трехвходовых сумматоров соединены с выходами соответствующих датчиков угловой скорости, при этом дополнительно введены три измерителя угловых качаний роторов. Технический результат – повышение точности измерения параметров движения трехкомпонентным датчиком угловой скорости. 1 з.п. ф-лы, 2 ил.
1. Трехкомпонентный датчик угловой скорости, содержащий три датчика угловой скорости с датчиками моментов в обратных связях с взаимно перпендикулярными измерительными осями и осями собственного вращения, три трехвходовых сумматора, шесть инвертирующих усилителей, причем первые входы трехвходовых сумматоров соединены с выходами соответствующих датчиков угловой скорости, отличающийся тем, что введены три измерителя угловых качаний роторов, выходы первого из которых соединены через первый инвертирующий усилитель со вторым входом первого трехвходового сумматора, а через пятый инвертирующий усилитель с третьим входом второго трехвходового сумматора, выходы второго измерителя качания ротора связаны через посредство второго инвертирующего усилителя со вторым входом второго трехвходового сумматора, а через посредство шестого инвертирующего усилителя с третьим входом третьего трехвходового сумматора, выход третьего измерителя качания ротора соединен через посредство третьего инвертирующего усилителя со вторым входом третьего трехвходового сумматора, а через посредство четвертого инвертирующего усилителя связан с третьим входом первого трехвходового сумматора, при этом коэффициенты инвертирующих усилителей имеют вид:



а скорректированный ток датчиков моментов имеет вид:



где ij (s), IO, IS, ISP, k, m, 

где X, Y, Z – измерительные оси трехкомпонентного измерителя угловой скорости; 


2. Трехкомпонентный датчик угловой скорости по п.1, отличающийся тем, что при разомкнутой связи первых входов трехвходовых сумматоров с соответствующими измерителями угловой скорости выходы трехвходовых сумматоров подключены к дополнительным обмоткам датчиков моментов, соответствующих измерителей угловой скорости.
| ТРЕХКОМПОНЕНТНЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2273858C1 |
| Трехкомпонентный измеритель угловой скорости | 1975 |
|
SU634212A1 |
| ТРЕХКОМПОНЕНТНЫЙ СТРУЙНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2017 |
|
RU2654308C1 |
| US 2010257933 A1, 14.10.2010. | |||
