Изобретение относится к области комплексного контроля пилотажно-навигационного оборудования систем управления подвижными маневренными аппаратами типа самолет, вертолет, дистанционно-пи-лотируемый летательный аппарат, космический аппарат и, в частности, к средствам аппаратурно безызбыточного контроля основных датчиков ориентации и навигации этих аппаратов минимального веса, габаритов, энергопотребления, сложности и стоимости. Оно может быть использовано для создания простых и высоконадежных средств контроля и управления резервных каналов пилотажно-навигационных систем современного летательного аппарата, защищенных от отказов и сбоев основной многократно резервированной сложной системы управления.
Известны устройства контроля датчиков параметров измерительных каналов аппарата с применением вычислительного устройства и устройства сравнения порогов оценки результатов измерений сигналов и параметров движения [Беляевский Л.С., Новиков B.C., Олянюк П.В. Обработка и отображение радионавигационной информации. М.: Радио и связь, 1990. с.114-119; Алтухов В.Ю., Стадник В. В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация. М.: Машиностроение, 1991, с.35, 42, 91]. Устройство контроля реализует n - кратное измерение контролируемого параметра и вычисление отношения правдоподобия с учетом среднего риска принятия решения об исправности. Для достоверного контроля необходимо иметь точное и известное во времени описание законов распределений всех контролируемых параметров движений аппарата, что для маневренного аппарата практически невозможно. Усложнение устройства контроля при построении оптимального решающего правила и аддитивной связи контролируемых сигналов датчиков и погрешностей их измерений, приводит к проверке сложных гипотез контроля. Такой контроль при широких диапазонах изменения проверяемых сигналов линейных и угловых скоростей, ускорений аппарата крайне затруднен.
Известно устройство контроля пилотажных параметров крена и тангажа - блок сравнения и предельного крена (БСПК-1) [Перескоков А.Н. Приборное оборудование вертолетов МИ-8 (Т, МТ, МТВ, АМТ). СПб.: Академия ГА, 2003, с.19; Бондарчук И.Е., Харин В.И. Авиационное и радиоэлектронное оборудование самолета ЯК-40. М.: Транспорт, 1982, с.205]. Устройство содержит две следящие системы с сельсинами-датчиками двух одинаковых датчиков тангажа и крена аппарата, релейные усилители, выполняющие функции компараторов, и ламельные схемы сигнализации предельных углов крена и тангажа. Имеет место сравнение одноименных сигналов тангажа и крена резервированных датчиков горизонта пилотажно-навигационного комплекса аппарата. Габариты, вес, энергопотребление, стоимость такого устройства велики, а информационная производительность IБСПК=0,424 бит/с [1, с.11-13] и достоверность контроля [2, с.87] сравнительно низкие PД.БСПК(2)=0,546363. Время достоверного контроля немного больше среднего полетного tП=2 часа.
Известно комплексное устройство контроля датчиков орбитальной ориентации спутника [Орбитальное гирокомпасирование./ Под ред. Б.Б.Самотокина. СПб.: Политехника, 1993. С.42-43], содержащее датчики абсолютных угловых скоростей по осям связанной системы координат и измерительное устройство - однороторную или двухроторную гироорбиту, определяющую углы крена, рыскания, тангажа ориентации спутника. Ошибки ориентации спутника по крену и рысканию взаимосвязаны с проекциями вектора абсолютной угловой скорости аппарата на оси чувствительности датчиков угловых скоростей по продольной и нормальной осям связанной системы координат. Это позволяет по сглаженным и интегрированным сигналам этих датчиков судить об исправности всего пилотажно-навигационного комплекса, совершающего сложное орбитальное движение и измеряемое гироскопическим орбитантом. Так как в исправном комплексе эти ошибки, измеренные высокочувствительными датчиками угловых скоростей, имеют ограниченное значение, устройство достоверно проверяет датчики угловых скоростей и информацию по крену и рысканию орбитанта. Возможность контроля скоростей, ускорений аппарата отсутствует. Применение данной схемы контроля ограничено только искусственным спутником Земли, где работоспособно специальное измерительное устройство этого пилотажно-навигационного комплекса - гироорбита.
Известны устройства контроля датчиков пилотажно-навигационных комплексов самолетов и вертолетов, содержащие по три одинаковых датчика тангажа, крена, линейных скоростей, ускорений, угловых скоростей, и мажоритарные блоки обработки их сигналов типа блока контроля крена (БКК), базовой системы курса и вертикали (БСКВ), блока формирования и контроля (БФК), блока согласования (БС), блока демпфирующих гироскопов (БДГ), блока формирования (БФ) информационного комплекса высотно-скоростных параметров (ИКВСП) и др. [Алтухов В.Ю., Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация. М.: Машиностроение, 1991, с.39, 122; Епифанов А.Д. Надежность систем управления. М.: Машиностроение, 1975. с.129; Воробьев В.Г., Глухов В.В., Кадышев И.К.Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992, с.193, 291]. Помимо трех одноименных контролируемых датчиков мажоритарные блоки устройств содержат три нелинейных элемента, образующих кворум-элемент, и компараторы. Последние проводят непрерывное сравнение выходных сигналов каждого из трех датчиков с их осредненным сигналом, полученным на выходе кворум-элемента. Разностный сигнал, пропорциональный крену (курсу, тангажу, ускорению, угловой скорости, скорости и т.д.), сравнивается с допустимой ошибкой измерения. Точность, достоверность контроля каждого датчика сравнительно высока во всем диапазоне измерения пилотажно-навигационного комплекса. Однако, как и для блока сравнения и предельного крена (БСПК), здесь необходимо избыточное число одноименных проверяемых датчиков, что связано с ростом стоимости, габаритов, энергопотребления, что затруднено или невозможно на легком, маневренном аппарате. Контроль имеет избыточный и весьма затратный характер как при изготовлении, так и при эксплуатации объекта. Информационная производительность мажоритарного контроля составляет IБКК=3,569 бит/с. Достоверность контроля датчиков линейных скоростей VX,VY,VZ (доплеровского измерителя скорости и сноса ДИСС-016, TДИСС=500 час) составляет PД2.ДИСС(2)=0,706403, а соответствующее время достоверного контроля ТД2.ДИСС=5,75 часа. Достоверность контроля трех векторных микромеханических датчиков угловых скоростей и ускорений (инерциального измерительного блока ИИБ ТИИБ=3200 час, ТДУС=15000 час, TАКС=25000 час) мажоритарными блоками БКК (или бортовым вычислителем БЦВМ-80-40ХХХ, TБКК(БЦВМ)=4500 час) будет РД2.ИИБ(2)=0,00010657. Соответствующее время достоверного контроля датчиков ИИБ подвижного аппарата с мажоритарными блоками будет сравнительно невелико ТД2.ИИБ=0,22 час [3; 4, с.219]. Результирующая достоверность мажоритарного контроля РД2(2)=0,000075, ТД2=0,21 часа.
Известно устройство распределенной вычислительной системы сбора полетной информации, контроля и диагностики бортовых систем "Регата" (Ратникова Н.А. Распределенная вычислительная система "Регата" - основа технологии контроля воздушных судов по состоянию // Авиакосмическое приборостроение, №7, 2004. С.44-52 и др.), содержащая приемные модули аналого-цифрового преобразования (АЦП 24, АЦП 32, АЦП ТП, АЦП ТР, АЦП И, АЦП 16ПТ, АЦП СКТ М, АЦП ПР М, АЦП ТН), частотные преобразователи (ВИ ЧМ, ВИ СЧ, ЧП), контроллеры межмашинного обмена (RS, ТМТ, КПИ М, РК, КПИ), системные управляющие контроллеры (процессоры 200, 300), твердотельный накопитель с процессором 300, цифровой вычислитель, систему единого времени, выносной пульт управления, устройства установки синхронизации и запросов прерывания. Модульное построение аппаратно-программных средств дает возможность наращивания вычислительных мощностей устройства, сигналы в котором обрабатываются на трех уровнях. Верхний уровень проверяет выполнение взаимосвязей параметров состояния проверяемых систем. Средний уровень экспертных систем анализирует текущую и доопытную информацию об отказах по методам теории нечетких выводов с привлечением знаний специалистов - экипажа. На нижнем уровне для заданного диапазона изменения нормированных сигналов ведется вероятностно-гарантированная оценка состояния исправности приборов с привлечением известных статистических критериев качества. Предполагается, что известны траектория движения объекта, совокупность контролируемых параметров и их эталонные области значений. Отклонение нормированных контролируемых параметров и эталонных значений в полете статистически проверяется. Детерминизм значений существенно ограничивает область контроля, а статистика обработки ведет к запаздыванию результата, зависимому и от привлечения к контролю доопытной информации (ее может вообще не быть) и специалистов - экипажа, который занят управлением самолета. Сложность устройства "Регата", как централизованной интегральной системы контроля всего самолета, и как результат, его низкая собственная надежность отрицательно влияют на достоверность обнаружения отказов отдельных особенно высоконадежных систем, каким и является пилотажно-навигационный комплекс. Степень автоматизации контроля в полете без участия экипажа, наземного предполетного и послеполетного обслуживания по базам данных желательно повысить, что исключительно актуально для беспилотных объектов.
Наиболее близким к заявляемому устройству для контроля датчиков системы управления подвижного аппарата, является "Устройство для комплексного контроля датчиков подвижного объекта" (Заявка на выдачу патент на изобретение РФ №2011119350(028559) от 13.05.2011, МПК6 G05B 23/02), содержащее датчик поперечной угловой скорости объекта, датчик нормальной угловой скорости объекта, датчик продольной угловой скорости объекта, датчик нормальной перегрузки объекта, датчик поперечной перегрузки объекта, датчик продольной перегрузки объекта, датчик синуса крена объекта, датчик косинуса крена объекта, датчик косинуса тангажа объекта, датчик синуса тангажа объекта, датчик продольной скорости объекта, датчик нормальной скорости объекта, датчик поперечной скорости объекта, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой умножители, первый, второй, третий сумматоры, первый, второй, третий дифференциаторы, первый, второй, третий компараторы, схему ИЛИ, выход датчика поперечной угловой скорости соединен с первыми входами первого и второго умножителей, вторые входы которых соединены соответственно с выходом датчика продольной скорости аппарата и выходом датчика нормальной скорости аппарата, выход датчик нормальной угловой скорости соединен с первыми входами третьего и четвертого умножителей, вторые входы которых соединены соответственно с выходом датчика продольной скорости аппарата и выходом датчика поперечной скорости аппарата, выход датчик продольной угловой скорости соединен с первыми входами пятого и шестого умножителей, вторые входы которых соединены соответственно с выходом датчика нормальной скорости аппарата и выходом датчика поперечной скорости аппарата, первый вычитающий вход первого сумматора, через первый дифференциатор, соединен с выходом датчика продольной скорости, второй суммирующий вход - с выходом второго умножителя, третий вычитающий вход - с выходом четвертого умножителя, четвертый вход - с выходом датчика продольной перегрузки, пятый вычитающий вход - с выходом датчиком синуса тангажа, а выход - с входом первого компаратора, первый вычитающий вход второго сумматора, через второй дифференциатор, соединен с выходом датчика нормальной скорости, второй суммирующий вход - с выходом шестого умножителя, третий вычитающий вход - с выходом первого умножителя, четвертый вход - с выходом датчика нормальной перегрузки, пятый вычитающий вход - с выходом седьмого умножителя, входы которого соединены с выходом датчика косинуса крена и выходом датчика косинуса тангажа, а выход - с входом второго компаратора, первый вычитающий вход третьего сумматора, через третий дифференциатор, соединен с выходом датчика поперечной скорости, второй суммирующий вход - с выходом третьего умножителя, третий вычитающий вход - с выходом пятого умножителя, четвертый вход - с выходом датчика поперечной перегрузки, пятый суммирующий вход - с выходом восьмого умножителя, входы которого соединены с выходом датчика синуса крена и выходом датчика косинуса тангажа, а выход - с входом третьего компаратора, выход которого, как и выходы первого и второго компараторов, соединены с входами схемы ИЛИ, являющейся выходом устройства. Устройство обладает большой информационной производительностью контроля IПРОТ=3,993÷4,365 бит/с и достоверностью контроля проверяемых датчиков РД3(2)=0,511117, что соответствует среднему времени достоверного контроля ТД3=2,98 часа. Достоверность контроля именно датчиков продольной, нормальной, поперечной скоростей РД3.ДИСС (2)=0,442167, что соответствует среднему времени достоверного контроля ТД3.ДИСС=2,45 часа (при алгоритмической реализации на БЦВМ-80-40ХХХ, имеющей среднее время наработки на отказ ТБЦВМ=4500 ч [3, с.341]). Достоверность контроля датчиков угловых скоростей и ускорений инерциального измерительного блока ИИБ составляет РД2.ИИБ(2)=0,069227, что соответствует временной характеристике ТД3.ИИБ=0,75 часа. Отсутствие избыточных датчиков, необходимых для обнаружения отказа, сделало целесообразным применение этого устройства в пилотажно-навигационных комплексах легких аппаратов. Устройство использует информацию датчиков, уже имеющихся на борту объекта и входящих в состав его штатного приборного оборудования. Система контроля, принятая за прототип, является наименьшей по весу, стоимости, габаритам и энергопотреблению.
Недостатком устройства контроля, выбранного за прототип, является сравнительно низкая достоверность контроля датчиков поперечной, нормальной, продольной угловых скоростей и перегрузок, датчиков поперечной, нормальной и продольной скоростей маневренного аппарата. Для контроля названных датчиков система управления должна содержать сравнительно габаритные датчики синуса и косинуса тангажа и крена аппарата. Точность контроля, зависящая от погрешностей комплексируемых датчиков, сравнительно низкая. Причиной, препятствующей получению указанного ниже технического результата при использовании известного устройства - прототипа, является также применение для контроля датчиков поперечной, нормальной, продольной перегрузок и построителя вертикали с ограниченными по точности и надежности характеристиками. Датчики продольной, поперечной и нормальной перегрузок имеют сравнительно низкую точность и применяются в системах управления маневренных аппаратов для безопасности пилотирования. Навигационные системы содержат датчики - акселерометры на несколько порядков более точные, чем датчики перегрузок. При этом наличие датчиков синуса и косинуса тангажа и крена построителя вертикали в алгоритме контроля - прототипе также ведет к недопустимо большим ошибкам контроля датчиков скоростей, угловых скоростей, ускорений навигационного класса. Большое число типов современных маневренных аппаратов не содержат построители вертикали в системе управления. Практическая реализация аппарата с датчиками тангажа и крена в микромеханическом исполнении крайне затруднена. Все это сужает область применения устройства контроля.
Основной задачей, на решение которой направлен заявленный объект - устройство, является создание аппаратурно безызбыточного устройства повышенной достоверности и точности контроля, с высокими технико-экономическими показателями по весу, габаритам, энергопотреблению, стоимости, удобству эксплуатации на легком маневренном аппарате предпочтительно аэрокосмического назначения. Техническим результатом, достигаемым при осуществлении заявленного изобретения, является получение высокой информационной производительности контроля, путем одновременного контроля исправности всех важнейших датчиков движения и навигации пилотируемого или беспилотного аппарата. Имеет место повышение достоверности обнаружения отказа именно контролируемых датчиков движения, а не контролирующих средств. Повышение точности контроля датчиков здесь прежде всего обусловлено применением для обнаружения отказов высокоточной выходной информации всех бортовых средств измерения подвижного аппарата. Это продольные, поперечные, нормальные акселерометры и датчики угловых скоростей инерциального измерительного блока ИИБ навигационного типа, а не датчики перегрузок, датчики продольной, поперечной, нормальной скоростей аппарата возможно доплеровского типа или спутниковой навигационной системы.
Указанный технический результат достигается тем, что в устройство для контроля датчиков системы управления подвижного аппарата, содержащее датчик поперечной угловой скорости, выход которого соединен с первыми входами первого и второго умножителей, датчик нормальной угловой скорости, выход которого соединен с первыми входами третьего и четвертого умножителей, датчик продольной угловой скорости, выход которого соединен с первыми входами пятого и шестого умножителей, датчик продольной скорости, выход которого соединен со вторыми входами первого и третьего умножителей, а через первый дифференциатор, с первым вычитающим входом первого сумматора, второй суммирующий вход - с выходом второго умножителя, третий вычитающий вход - с выходом четвертого умножителя, датчик нормальной скорости, выход которого соединен со вторыми входами второго и пятого умножителей, а через второй дифференциатор, с первым вычитающим входом второго сумматора, второй суммирующий вход - с выходом шестого умножителя, третий вычитающий вход - с выходом первого умножителя, датчик поперечной скорости, выход которого соединен со вторыми входами четвертого и шестого умножителей, а через третий дифференциатор, с первым вычитающим входом третьего сумматора, второй суммирующий вход - с выходом третьего умножителя, третий вычитающий вход - с выходом пятого умножителя, седьмой, восьмой умножители, компаратор, дополнительно введены продольный акселерометр, нормальный акселерометр, поперечный акселерометр, выходы которых соединены соответственно с четвертыми суммирующими входами первого, второго, третьего сумматоров, девятый умножитель, задатчик ускорения силы тяжести, функциональный преобразователь, четвертый сумматор, суммирующие входы которого соединены соответственно через седьмой, восьмой, девятый умножители, так, что их первый и второй входы соединены соответственно с выходами первого, второго и третьего сумматоров, выход четвертого сумматора, через функциональный преобразователь, соединен с одним входом компаратора, другой вход которого соединен с выходом задатчика ускорения силы тяжести.
Совокупность существенных признаков изобретения обеспечивает достижение технического результата, достигаемого при осуществлении изобретения - устройства для контроля датчиков системы управления подвижного аппарата введением продольного акселерометра, нормального акселерометра, поперечного акселерометра, задатчика ускорения силы тяжести, функционального преобразователя, четвертого сумматора, девятого умножителя и связей. Для обоснования этих признаков и связей необходимо рассмотреть векторное уравнение для кажущегося ускорения [5, с.79]

где 


Определим в связанных осях аппарата проекции вектора ускорения силы тяжести: gX=-gsinϑ; gY=-gcosϑcosγ; gZ=gcosϑsinγ, где g - величина ускорения силы тяжести, ϑ, γ - углы тангажа и крена аппарата относительно планеты (Земли). Проекции вектора абсолютного ускорения будут [6, с.248]: 


где VX, VY VZ - проекции вектора скорости 




Определив модуль вектора ускорения силы тяжести 



где Ф - функция контроля; ФП - порог срабатывания компаратора; UK - выходной сигнал компаратора. Наличие в предлагаемом устройстве продольного, нормального, поперечного акселерометров, а также их связей со входами соответственно первого, второго и третьего сумматоров, выходы которых соответственно через входы седьмого, восьмого, девятого умножителей соединены с входами четвертого сумматора, через функциональный преобразователь подключенный к входу компаратора, другой вход которого соединен с выходом задатчика ускорения силы тяжести, обеспечивает повышение достоверности и точности контроля инерциального измерительного блока и датчиков продольной, нормальной, поперечной скорости подвижного аппарата. Достоверность и точность повышается из-за упрощения алгоритма контроля, в котором нет необходимости в датчике синуса тангажа, датчике косинуса тангажа, датчике синуса крена, датчике косинуса крена. Последние имеют низкую надежность и точность на подвижном аппарате, а габариты, вес, энергопотребление и стоимость существенны для современных мини- и микроподвижных аппаратов. Отсутствие указанных датчиков расширяет область применения заявляемого устройства подвижными аппаратами ракетного и космического типа [7, с.160-162], для которых актуально точное измерение ускорений, а тангаж и крен, если они необходимы, вычисляются по сигналам контролируемых в заявке датчиков угловых скоростей инерциального измерительного блока. Контроль продольного, нормального и поперечного акселерометров, а не датчиков перегрузок, как в прототипе, также повышает точность контроля, так как последние имеют большие погрешности измерения [8, с.299, 255, 300; 9, с.339; 10, с.344] и ограниченную область применения для авиации умеренных скоростей околоземного полета [11, с.157; 12, с.44-45], по сравнению с обычными акселерометрами навигационного класса [13, с.228].
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественных всем признакам заявленного устройства для контроля датчиков подвижного аппарата, отсутствуют, следовательно, заявленное изобретение соответствует условию "новизна".
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата, и изобретение не основано на:
- дополнении известного устройства - аналога какой-либо известной частью, присоединенной к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства - аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- исключении какой-либо части устройства - аналога с одновременным исключением, обусловленной ее наличием функции, и достижением обычного для такого исключения результата;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства - аналога или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создание устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставлении таких признаков во взаимосвязи либо изменение вида взаимосвязи, если известен факт влияния каждого из них на технический результат и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, следовательно, заявленное изобретение соответствует "изобретательскому уровню".
Сущность изобретения поясняется чертежом, где на фиг.1, изображена структурная схема устройства для контроля датчиков подвижного аппарата и приняты следующие обозначения:
1-1 - датчик поперечной угловой скорости;
1-2 - датчик нормальной угловой скорости;
1-3 - датчик продольной угловой скорости;
2-1, 2-2, 2-3, 2-4, 2-5, 2-6, 2-7, 2-8, 2-9 - первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый умножители;
3-1 - датчик продольной скорости;
3-2 - датчик нормальной скорости;
3-3 - датчик поперечной скорости;
4-1, 4-2, 4-3, 4-4 - первый, второй, третий, четвертый сумматоры;
5-1 - продольный акселерометр;
5-2 - нормальный акселерометр;
5-3 - поперечный акселерометр;
6-1, 6-2, 6-3 - первый, второй, третий дифференциаторы;
7 - функциональный преобразователь;
8 - компаратор;
9 - задатчик ускорения силы тяжести.
Устройство для контроля датчиков системы управления подвижного аппарата содержит датчик 1-1 поперечной угловой скорости, датчик 1-2 нормальной угловой скорости и датчик 1-3 продольной угловой скорости по осям связанной системы координат. Первые входы первого умножителя 2-1 и второго умножителя 2-2 соединены с выходом датчика 1-1 поперечной угловой скорости. Вторые входы первого умножителя 2-1 и второго умножителя 2-2 соединены соответственно с выходом датчика 3-1 продольной скорости и выходом датчика 3-2 нормальной скорости. Первые входы третьего умножителя 2-3 и четвертого умножителя 2-4 соединены с выходом датчика 1-2 нормальной угловой скорости. Вторые входы третьего умножителя 2-3 и четвертого умножителя 2-4 соединены соответственно с выходом датчика 3-1 продольной скорости и выходом датчика 3-3 поперечной скорости. Первые входы пятого умножителя 2-5 и шестого умножителя 2-6 соединены с выходом датчика 1-3 продольной угловой скорости. Вторые входы пятого умножителя 2-5 и шестого умножителя 2-6 соединены соответственно с выходом датчика 3-2 нормальной скорости и выходом датчика 3-3 поперечной скорости. Первый и второй входы седьмого умножителя 2-7 соединены с выходом первого сумматора 4-1, второй суммирующий вход которого соединен с выходом второго умножителя 2-2, четвертый суммирующий вход - с выходом продольного акселерометра 5-1, третий вычитающий вход - с выходом четвертого умножителя 2-4, первый вычитающий вход, через первый дифференциатор 6-1 - с выходом датчика 3-1 продольной скорости, а выход седьмого умножителя 2-7 соединен с первым суммирующим входом четвертого сумматора 4-4. Первый и второй входы восьмого умножителя 2-8 соединены с выходом второго сумматора 4-2, второй суммирующий вход которого соединен с выходом шестого умножителя 2-6, четвертый суммирующий вход - с выходом нормального акселерометра 5-2, третий вычитающий вход - с выходом первого умножителя 2-1, первый вычитающий вход, через второй дифференциатор 6-2 - с выходом датчика 3-2 нормальной скорости, а выход восьмого умножителя 2-8 соединен со вторым суммирующим входом четвертого сумматора 4-4. Первый и второй входы девятого умножителя 2-9 соединены с выходом третьего сумматора 4-3, второй суммирующий вход которого соединен с выходом третьего умножителя 2-3, четвертый суммирующий вход - с выходом поперечного акселерометра 5-3, третий вычитающий вход - с выходом пятого умножителя 2-5, первый вычитающий вход, через третий дифференциатор 6-3 - с выходом датчика 3-3 поперечной скорости, а выход девятого умножителя 2-9 соединен с третьим суммирующим входом четвертого сумматора 4-4. Выход четвертого сумматора 4-4 через функциональный преобразователь 7 соединен с одним входом компаратора 8, другой вход которого соединен с выходом задатчика 9 ускорения силы тяжести. Выход компаратора 8 является выходом устройства для контроля датчиков системы управления подвижного аппарата.
Практическая реализация устройства для комплексного контроля датчиков системы управления подвижного аппарата возможна на аналоговой и цифровой схемотехнической базе [3, 14, 15]. При этом возможен весьма широкий набор практических схем и типов контролируемых датчиков бортового оборудования. Перечисленные датчики параметров движения a X, a Y, a Z, ωX, ωY, ωZ, VX, VY, VZ входят в состав типовых систем автоматического управления (типа САУ-10, САУ-451, КСЭИС, СИВПП-В, КСУ-130, и др. [1, с.92-102; 13, с.204; 16, с.690; 17, с.141]) пилотажно-навигационных комплексов летательных аппаратов. Датчики продольной, нормальной, поперечной угловой скорости ωX, ωY, ωZ по осям связанной системы координат аппарата включают большое число типовых гироскопических датчиков угловых скоростей от электромеханических: ДУСУ1, ДУСУ-АС, ДУСУ-М; волоконно-оптических, лазерных: ВГ941-3, ДУСв-5, ДУС-500, ГЛ-2 до микромеханических: ADIS, ADXRS, ДУС-ММА. Продольный, нормальный, поперечный акселерометры параметров a X, a Y, a Z могут включать как обычные приборы: ДЛУ, АДИА, АДИС, АК-6, так и микромеханические, интегральные измерители типа: ADXL, A-15, AT, АЛЕ [3, 4, 18, 19]. Акселерометры и датчики угловых скоростей образуют инерциальные измерительные блоки высокой интеграции одновременно измеряемых параметров a X, a Y, a Z, ωX, ωY, ωZ, например типа ИИБ, БА-50, ДУС-ММГ, ИБД-42, ИБД, АИСТ-320,БДГ-30,ИПД-ММ. Датчики проекций вектора скорости аппарата на его продольную, нормальную и поперечную оси параметров движения VX, VY, VZ могут использовать аэрометрические или радиотехнические измерители бортового оборудования, например типа ДИВ-1, ДИСС-15, ДИСС-32, П-1 1, А-077 спутниковые навигационные приемники СН-3301, А-737, А-744, СНС-2, АБРИС, системы воздушных сигналов типа ИКВСП-2, СВС-В1, СВС-2Ц, СВС-85, ДАУ-72, СВС-В1, ПКР-1. Реализация алгоритма контроля возможна программными средствами БЦВМ 80-30ХХХ или БЦВМ 80-40ХХХ, БЦВМ 90-60ХХХ, БЦВМ-486, имеющих высокие значения наработки на отказ в составе бортовых авиационных комплексов [3, с.87, 131, 224, 340; 20, с.178; 21, с.537; 22, с.272 и др.]. Программно в БЦВМ вводится задатчик 9 ускорения силы тяжести g, операция сравнения в компараторе 8 с выходным сигналом функционального преобразователя 7, реализующего математическую операцию извлечения квадратного корня из выходного сигнала сумматора 4-4.
Устройство для контроля датчиков системы управления подвижного аппарата работает следующим образом. Сигнал с выхода датчика 1-1 поперечной угловой скорости аппарата, пропорциональный ωZ, поступает на первый вход умножителя 2-1 и умножителя 2-2. Одновременно, на первый вход умножителя 2-3 и умножителя 2-4 поступает выходной сигнал датчика 1-2 нормальной угловой скорости аппарата, пропорциональный ωY, а на первые входы умножителя 2-5 и умножителя 2-6 поступает выходной сигнал датчика 1-3 продольной угловой скорости, пропорциональный ωX. На второй вход умножителя 2-1 и умножителя 2-3 поступает сигнал с выхода датчика 3-1 продольной скорости аппарата, пропорциональный VX. На второй вход умножителя 2-2 и умножителя 2-5 поступает сигнал с выхода датчика 3-2 нормальной скорости аппарата, пропорциональный VY.
На второй вход умножителя 2-4 и умножителя 2-6 поступает сигнал с выхода датчика 3-3 поперечной скорости аппарата, пропорциональный VZ. Выходные сигналы умножителей 2-1, 2-2, 2-3, 2-4, 2-5, 2-6 образуют оценки добавочных ускорений движения аппарата из-за его маневрирования. Выходной сигнал датчика 3-1 продольной скорости аппарата, пропорциональный VX, через первый дифференциатор 6-1 поступает на первый вычитающий вход сумматора 4-1, на второй суммирующий вход которого поступает выходной сигнал умножителя 2-2, на третий вычитающий вход - выходной сигнал умножителя 2-4, а на четвертый суммирующий вход - выходной сигнал продольного акселерометра 5-1, пропорциональный a X. Выходной сигнал датчика 3-2 нормальной скорости аппарата, пропорциональный VY, через второй дифференциатор 6-2 поступает на первый вычитающий вход сумматора 4-2, на второй суммирующий вход которого поступает выходной сигнал умножителя 2-6, на третий вычитающий вход - выходной сигнал умножителя 2-1, а на четвертый суммирующий вход - выходной сигнал нормального акселерометра 5-2, пропорциональный a Y. Выходной сигнал датчика 3-3 поперечной скорости аппарата, пропорциональный VZ, через третий дифференциатор 6-3 поступает на первый вычитающий вход сумматора 4-3, на второй суммирующий вход которого поступает выходной сигнал умножителя 2-3, на третий вычитающий вход - выходной сигнал умножителя 2-5, а на четвертый суммирующий вход - выходной сигнал поперечного акселерометра 5-3, пропорциональный a Z. Выходной сигнал сумматора 4-1 через умножитель 2-7, оба входа которого соединены с выходом сумматора 4-1, поступает на первый вход сумматора 4-4. Аналогично выходной сигнал сумматора 4-2 через умножитель 2-8, оба входа которого соединены с выходом сумматора 4-2, поступает на второй вход сумматора 4-4, а выходной сигнал сумматора 4-3 через умножитель 2-9, оба входа которого соединены с выходом сумматора 4-3, поступает на третий вход сумматора 4-4. Выходной сигнал сумматора 4-4 поступает на функциональный преобразователь 7, где происходит операция извлечения квадратного корня из выходного сигнала сумматора 4-4 с последующей передачей этого сигнала, пропорционального оценке ускорения g силы тяжести, на вход компаратора 8. Это значение сравнивается в компараторе 8 с сигналом задатчика 9 ускорения g силы тяжести в соответствии с выражением (8). Значение ускорения силы тяжести априорно известно [12, с.44; 24, с.791], а поле допуска ФП сигналов определяется допустимыми погрешностями исправных контролируемых датчиков системы управления. В том случае, если один или несколько из них откажут, что выразится в недопустимо больших погрешностях работы, то вычисленное значение оценки g выйдет за пределы поля допуска ФП, что будет зафиксировано устройством как отказ датчиков аппарата.
Таким образом, для заявляемого устройства контроля датчиков системы управления подвижного аппарата отсутствуют отмеченные ранее недостатки прототипа. Достоверность контроля датчиков поперечной, нормальной, продольной угловой скорости, датчиков продольной, нормальной, поперечной скорости, а также продольного, нормального и поперечного акселерометров составляет PД(2)=0,912597, что соответствует времени достоверного контроля ТД=21,9 часа. Это значение в 7,35 раза больше, чем в прототипе, и на порядок больше, чем в мажоритарном аналоге, для датчиков и БЦВМ, указанных ранее. Время достоверного контроля только датчиков продольной, нормальной, поперечной скорости в 3,45 раза больше, чем в прототипе. Время достоверного контроля инерциального измерительного блока с акселерометрами и датчиками угловых скоростей больше в 1,28 раза, чем в прототипе. При высокой информационной производительности I=3,569 бит/с заявляемое устройство позволяет контролировать систему управления минимальных габаритов, веса, энергопотребления, стоимости, состоящую только из микромеханических датчиков. Задача полетного контроля безызбыточными средствами минимального веса, габаритов, энергопотребления, сложности и стоимости решается параллельно с автоматическим управлением без снижения эффективности выполнения основных полетных задач объекта. При этом обеспечивается работа и контроль всех датчиков как в полетном, так и предполетном состоянии. Контроль ведется по безынерционным соотношениям, содержащим арифметические операции, достаточно просто реализуемые на борту летательного аппарата в реальном масштабе времени работы объекта. Точность контроля здесь выше приблизительно в два раза из-за отсутствия погрешностей построителя вертикали, неточности и нестабильности масштабного коэффициента датчиков перегрузок. Заявляемое устройство работоспособно при любых пространственных маневрах аппарата и реализуемо для большого числа вариантов датчиков аэрокосмического применения. Устройство контроля имеет более широкую область применения для аэрокосмических аппаратов, не содержащих датчиков тангажа, крена построителя вертикали, как в прототипе. Программная реализация в безынерционном контрольном алгоритме, параллельно с основным вычислительным процессом управления, возможна и на входе потребителей пилотажно-навигационной информации комплекса управления. Сложность, затратность и вероятность сбоя алгоритмической реализации минимальны. При этом контролем охвачены все критические, с точки зрения управления неустойчивым аппаратом датчики.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполняются следующие условия:
- средство, воплощающее устройство-изобретение при его осуществлении, предназначено для использования в аэрокосмической технике и, в частности, для комплексного контроля датчиков систем управления пилотажно-навигационных комплексов беспилотных, пассажирских и транспортных самолетов, вертолетов. Оно может использоваться для определения исправности датчиков в полете;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности "промышленная применимость".
Источники информации
1. Боднер В.А. Системы управления летательными аппаратами. М.: Машиностроение, 1973. 506 с.
2. Голинкевич Т.А. Оценка надежности радиоэлектронной аппаратуры. М.: Советское радио, 1969. 176 с.
3. Авионика России. Энциклопедический справочник./ Под ред. С.Д.Бодрунова. СПб.: Национальная Ассоциация авиаприборостроителей, 1999, 780 с.
4. Авиационная радионавигация: Справочник./А.А.Сосновский, И.А.Хаймович, Э.А.Лутин, И.Б.Максимов; Под ред. А.А.Сосновского. М.: Транспорт, 1990. 264 с.
5. Ишлинский А.Ю. Механика относительного движения и силы инерции. М.: Наука, 1981. 191 с.
6. Бутенин Н.В., Лунц Я.Л., Меркин Д.Р. Курс теоретической механики. T.1, М.: Наука, 1978. 272 с.
7. Дрейпер Ч., и др. Навигация, наведение, и стабилизация в космосе. М.: Машиностроение, 1970. 363 с.
8. Авиационные приборы. Под ред. С.С.Дорофеева. М.: Воениздат, 1992. 496 с.
9. Боднер В.А. Приборы первичной информации. М.: Машиностроение, 1981. 344 с.
10. Датчики теплофизических и механических параметров. Т.2. / Под общ. ред. Ю.Н.Коптева; Под ред. Багдатьева, Гориша, Малкова. М.: ИПРЖР, 1999. 688 с.
11. Остославский И.В., Стражева И.В. Динамика полета. Траектории летательных аппаратов. М.: Машиностроение, 1969. 499 с.
12. Енохович А.С. Справочник по физике и технике. М.: Просвещение, 1976. 175 с.
13. Анучин А.С., Емельянцев Г.И. Интегрированные системы ориентации и навигации для морских подвижных объектов. СПб.: ГНЦ РФ - ЦНИИ "Электроприбор", 2003. 390 с.
14. Аналоговые и цифровые интегральные микросхемы: Справочное пособие / С.В.Якубовский, И.А.Барканов, Л.И.Ниссельсон и др. / Под ред. С.В.Якубовского. М.: Радио и связь,1984 г., с.432. 15. Смолов В.Б. Функциональные преобразователи информации. Л.: Энергоиздат, 1981. с.248.
16. Макаров Н.Н. Системы обеспечения безопасности функционирования бортового эргатического комплекса: теория, проектирование, применение / Под ред. В.М.Солдаткина. М.: Машиностроение, 2009. 759 с.
17. Алтухов В.Ю., Стадник В.В. Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая эксплуатация. М.: Машиностроение, 1991. 160 с.
18. Кузнецов А.Г., Абутидзе З.С., Портнов Б.И., Галкин В.И., Калик А.А. Опыт разработки микромеханических датчиков для пилотажных систем управления. // Гироскопия и навигация. 2010. №2. С.50-56.
19. Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем. СПб.: ГНЦ РФ ОАО "Концерн "ЦНИИ "Электроприбор", 2009. 280 с.
20. Флеров А.Г., Тимофеев В.Т. Доплеровские устройства и системы навигации. М.: Транспорт, 1987. 191 с.
21. Анучин О.Н., Комарова И.Э., Порфирьев Л.Ф. Бортовые системы навигации и ориентации искусственных спутников Земли. СПб.: ГНЦ РФ ЦНИИ "Электроприбор", 2004. 326 с.
22.Авиация ПВО России и научно-технический прогресс: боевые комплексы и системы вчера, сегодня, завтра / Под ред. Е.А.Федосова. М.: Дрофа, 2004. 816 с.
23. Глобальная спутниковая радионавигационная система ГЛОНАСС / Под ред. В.Н.Харисова, А.И.Перова, В.А.Болдина. М.: ИПРЖР, 1998. 400 с.
24. Физический энциклопедический словарь. Гл. ред. А.М.Прохоров. М.: Сов. энциклопедия, 1984. 944 с.
Изобретение относится к области комплексного контроля пилотажно-навигационного оборудования систем управления подвижными маневренными аппаратами, в частности, к средствам аппаратурно безызбыточного контроля основных датчиков ориентации и навигации этих аппаратов минимального веса, габаритов, энергопотребления, сложности и стоимости. Техническим результатом работы устройства является повышение достоверности и точности контроля. Указанный результат достигается введением новых продольного, нормального, поперечного акселерометров, умножителей, сумматора, функционального преобразователя извлечения квадратного корня, задатчика ускорения силы тяжести и связей. При этом обеспечивается работа и контроль всех датчиков как в полетном, так и предполетном состоянии. Контроль ведется по безынерционным соотношениям, содержащим арифметические операции, достаточно просто реализуемые на борту подвижного аппарата в реальном масштабе времени. 1 ил.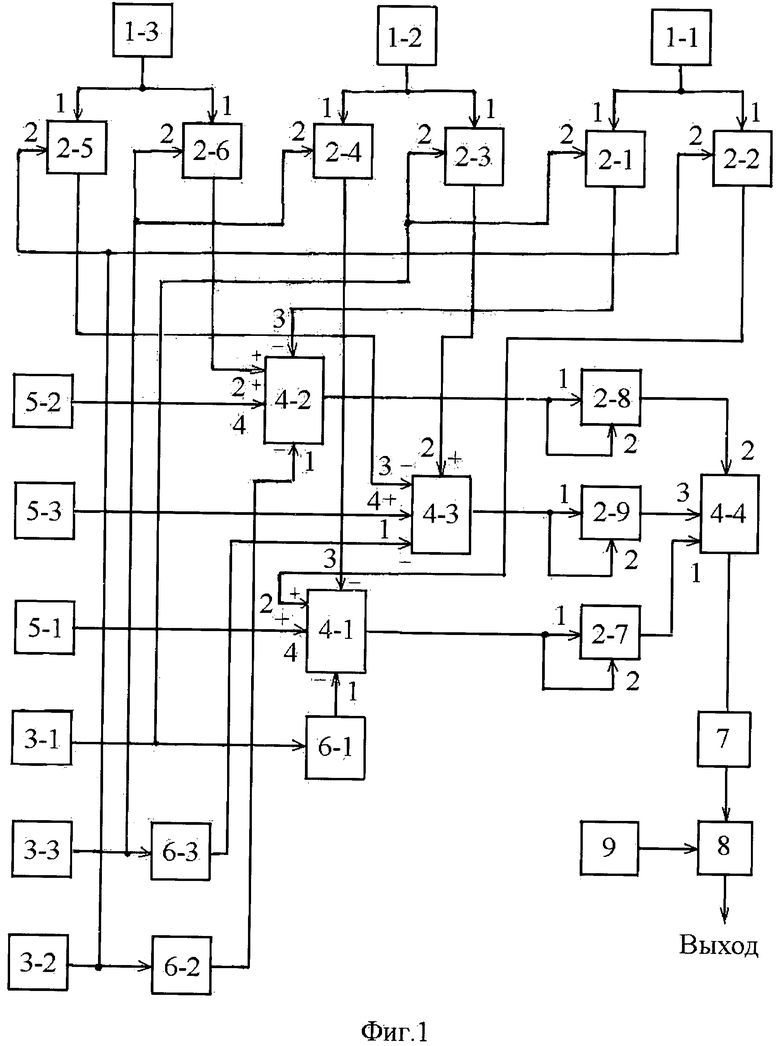
Устройство для контроля датчиков системы управления подвижного аппарата, содержащее датчик поперечной угловой скорости, выход которого соединен с первыми входами первого и второго умножителей, датчик нормальной угловой скорости, выход которого соединен с первыми входами третьего и четвертого умножителей, датчик продольной угловой скорости, выход которого соединен с первыми входами пятого и шестого умножителей, датчик продольной скорости, выход которого соединен со вторыми входами первого и третьего умножителей, а через первый дифференциатор, с первым вычитающим входом первого сумматора, второй суммирующий вход - с выходом второго умножителя, третий вычитающий вход - с выходом четвертого умножителя, датчик нормальной скорости, выход которого соединен со вторыми входами второго и пятого умножителей, а через второй дифференциатор, с первым вычитающим входом второго сумматора, второй суммирующий вход - с выходом шестого умножителя, третий вычитающий вход - с выходом первого умножителя, датчик поперечной скорости, выход которого соединен со вторыми входами четвертого и шестого умножителей, а через третий дифференциатор, с первым вычитающим входом третьего сумматора, второй суммирующий вход - с выходом третьего умножителя, третий вычитающий вход - с выходом пятого умножителя, седьмой, восьмой умножители, компаратор, отличающееся тем, что в него введены продольный акселерометр, нормальный акселерометр, поперечный акселерометр, выходы которых соединены соответственно с четвертыми суммирующими входами первого, второго, третьего сумматоров, девятый умножитель, задатчик ускорения силы тяжести, функциональный преобразователь извлечения квадратного корня, четвертый сумматор, суммирующие входы которого соединены соответственно через седьмой, восьмой, девятый умножители так, что их первый и второй входы соединены соответственно с выходами первого, второго и третьего сумматоров, выход четвертого сумматора, через функциональный преобразователь извлечения квадратного корня, соединен с одним входом компаратора, другой вход которого соединен с выходом задатчика ускорения силы тяжести.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ БЛОКА ОРИЕНТАЦИИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ | 2010 |
|
RU2431117C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СИСТЕМЫ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2265876C1 |
| EP 1489381 B1, 28.05.2008. | |||

