двумя напряжениями ие более 70-80°. Кроме того, в -с чедящей системе, содержащей даиное устройство для (Получения скоростного сигнала, имеются колебания, ,ва,нные в;вeдeiH иeм лииии задержкой в замкнутую систему.
На.Иболее близ-хни к ИЗОбретеННю техническим -рсшёгК 0м Является фазовая Следящая система 3, содержащая нослвдовательно соединенные усилитель считывания, фазовый длск рим.ннато.р, демодулятор, аюрвый сумматор, усилитель мон.1,;-1ост1л н исп-оли,итель:-1ый двигатель, вал кото рого связан € вращающимся трансформатором, выход которого нодклк чен к соответствующему входу фазового дискрнмнJiaTOipa, усилитель считывания опорного сигнала, выход которого .подключен ко входу вращающегося тра1нсформато1ра. В этой системе перемеи1,ен1ие по каждой из координат занисы(вается на дв1ух дорожках магнитной ленты Л.. На этих дорожках занисаны сигналы СИзгусо1идалы10|го На:п1ря1жения (рабочий и огаориый сигналы). Фаза рабочего сигнала определяет закои изменения управляемой «оординат)1. Эти с.И:Г01а; ы считываются Магвитньгми толов;ками и усил1И1заютСя усилителями. Усилитель спЭр но го сигнала иитает входные обмотки (С|ращающ,сгооя т рансформатора, являющегося даичикОМ Обратной связи. Ротор его к инематическн связан с управляемыми коо1рдннатам1И. Его выход - электрический угол, равный механическому у:лу, тюдается на один из входов фазового дискриминатора, являющегося миож,итель;ным устройством. На другой вхОД фазового днскрН.минатора подается рабочий сигиал. В результате перамножени-я этих двух сИГнало-в иа выходе Получается сигнал, ностоя.нная состаЗляющая которого является ситналоМ оши1б КИ- следящего ира-гвода. Далее этот сигнал лрео.б.раЭуется в иостояиное напряжение демодул-ято1рО:М, усил.ивается и подается на исполнительный- .двигатель, который будет стремиться ус-раио-вить унравляемую -координату в такое положение, ири котором сигнал ощибки будет-равиьш 0. НедостаткоМ иодобных систем яизляется ошибки слежения (скоростиой ошибки). Хотя в станк-ах иропрам,м:но1го .управления с небольшими рабочими скоростям} :н Г1рограм1мир0ван1ньрм тормоЖеи:ием и останово-м скоростная ошибка имеет незначительную величину, однако часто треб)уется -обрабатывать изделия без прогр.амМ-иэоваиного торм-оженИЯ и останова, натаример, дри рез:ке лазероьм трудно обрабатываемых матерма-лов иербхоДйМО осуществлять движение объектива со-скоростью порядка нескольких метров в секунду без торможения и останова. При обработке-контуров сложных конфигура.Ц-ий появляется скоростная-ошибка, с-о-из-мер- мая (а в некот-орых случаях и большая) с .топускоМ на изделие.
Целью изОбретения является увел:Ичение точиОСТи и раСШ:Ирение фуикЦиоиальных возможностей системы путем нрограмм1ИроваН(ИЯ разиой кОНтурной скорости в течение одко:го цикла и -увеличение числа ир-ОГраммирусмых
координат. Поставленная цель достигается тем, что система содержит соедИНениые последовательно второй Сум/матор И иреОбразователь «код-аиалог, два блока Ограничения, 5 два ф-ор мирователя -импульсов и два детектора, выходы которых соединены с соответств-ующ1Ими входами -второго сумматора, выход усиЛИтеля Считывания через иервый блок ограиич-ения и иервый формирователь имиуль10 сов соединен со входом первого детектора, выход усилителя считывания опорного сигнала связан через второй блок ограничения н второй формирователь и:м пульсов оо входом второго детектора, а выхОД преобразователя «код-аналог связан с соответствующим входом Первого сумматора.
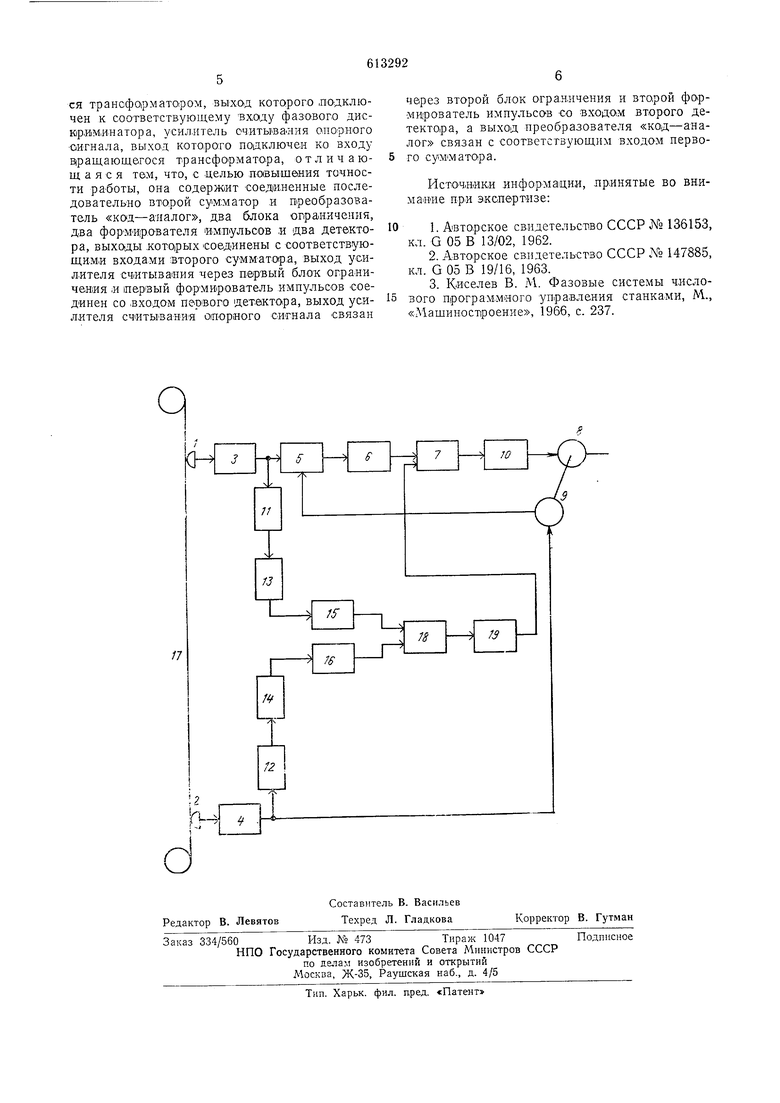
Блок-схема фазовой следящей системы изображена на чертеже.
Система содержит магнитные головки/и 2,
20 усилитель считывания 3, усил-итель сч-итывапня оиориого сигнала 4, фазовый дискриминатор 5, демодулятор 6, сумматор 7, двигатель 8, в-ращающийся трансформатор Я усилитель моп1,нОСТ1И 10, блоки О:праничения J1 .и 12, фор5 -мировател-и импульсов 13 и 14, детекторы 15 и 16, магнитную ленту 17, сумматор 18, преобразователь «код-аналог 19.
Система работает следующим образом. На блоки ограничения 11 -и 12 поступают
0 сигналы синусоидального напряжения, здесь они усиливаются и преОбразуются в сигналы прямоугольной фор-мы. Формирователи имиульсов 13 и 14 преобразуют прямоугольную форму напрял-севия в остроугольный сигнал и
5 -после детектирован-ия в детекторах 15 и 16 сигналы одного знака наступают «а вход сумматора 18.
На выходе сумагатора /S лоявляется последовательность остроугольных импульсов, частота -следования которых равна алгебраической сумме частот ра бочей и опорной, которая подается на вход преобразователя «код-аналог 19. На выходе Прео|бразоватеЛя «кад- ана-ЛОг 19 появляется напряжен-ие, прсшор5 циона.льное частоте импульсов на входе. Это напряжение подается на одни из вхо.дов сумматора 7, на другой вход его подается напряжение с демадулятора 6.
На Выходе сумматора 7 появляется наоря0 жение, равное сумме входных напряжений. Это напряжение усиливается в усилителе мощности 10 И подается на обмотки двигателя 8.
- Следящая система с подачей скоростного сигнала дает возмож:ность программирования
5 разной контурной скорости в течение о-дного цикла, позволяет, п-роизводить обработку с высокими рабоч-И1МИ скоростями.
Фор м у л а и 3 о б р е т е н и я О
ФаЗОвая- следящая система, содержащая последовательно соединенные усилитель считываНИЯ, фазо-вый диакриминатор, демодулятор, первый сумматор, усиотитель мощности.н двигатель, вал которого связан с враща ощнм
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство синхронизации широкополосных псевдослучайных сигналов | 1985 |
|
SU1415445A1 |
| Преобразователь кода в угловое положение вала | 1981 |
|
SU963042A1 |
| ФАЗОИМПУЛЬСНЫЙ ДЕМОДУЛЯТОР | 1992 |
|
RU2047269C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ НАСТРОЙКИ СИСТЕМ РЕГУЛИРОВАНИЯ | 1973 |
|
SU395806A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА ПРИВОДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2580153C1 |
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2480728C2 |
| Следящий фильтр-демодулятор | 1982 |
|
SU1095358A1 |
| Устройство для измерения скорости телеграфирования | 1974 |
|
SU547042A1 |
