Изобретение относится к активным внбро ащитным системам и может быть использова-. но для уменьшения вредных колебаний различного рода объектов.
Известен гаснтель колебаний с автоматическим управлением, содержащий упругие элементы, прикрепленные одними концами к колеблющемуся объекту, а другими - через электромеханический динамометр к изолируемому с бъекту, установленный между коле(ющимся и изолируемым объектом , электромеханический вибратор и цепь управления, вход которой соединен с динамометром, а выход, с вибратором . 1.
Недостатком данного гасителя является то, что он .уменьшает колебания лишь в одной плоскости по одной координате.
Из известных гасителей колебаиий с автоматической оптимизацией наиболее близким по технической сущности является гаситель колебаний с автоматической оптимизацией, содержащий массу гасителя, упругие элементы, соединяющие массу гасителя с колеблю.щимся объектом, датчики положения колеблющегося объекта и массы гасителя, логический блок, бЛок управления и амортизатор, установленный между колеблющимся объектом и основанием.
В устройстве нет системы, обеспечиваюихей уменьшение колебаний, происходящих по двум координатам, или радиальных колебаний при вращении колебательного телаГ21.
Это уменьшает эффективность автоматической оптимизации при сложном движении колеблющегося объекта.
Цель изобретения - повышение эффективности автоматической опть.лизации.
Указанная цель достигается тем, что масса гасителя выполнена в виде полого магнитопроводиого цилиидра, в полость которого помещают колеблющийся объект, гаситель снабжен электромагйитамн, симметрично расположенными на внутренней поверхности цилиндра с угловым смещением 90°, упругие элементы выполнены кольцевыми, логический блок выполнен в виде двух идентичных блоков определения момеитных значений положений, к входам одного из которых подсоединены вы.ходы дат чиков положения колеблющегося объекта, а к входам другого - выходы датчиков положения колеблющейся массы, и блока пропорциональности, к входам которого подключены выходы блоков определения моментных значений положений; блок управления выполнен в виде четырех управляемых усилителей, каждый из которых соединен с соответствующим электромагнитом, к управляющим входам первого и третьего усилителей подключен выход одного из датчиков положения массы гасителя, а к управляющим входам второго и четвертого усилителей -7- выход другого датчика положения массы гасителя, четырех блоков выборки, каждый из которых вкл|9чает в себя первый и второй ключи, к основным входам которых подключен выход логического блока, н схему совпадения, входы которой соединены с выходами датчиков положения массы гасителя, а выход подключен к управляющим входам ключей, четырех логических схем ИЛИ, к входам первой из которых подключены выходы второго и первого ключей соответственно первого к третьего блоков выборки, а к входам второй - выходы первого и второго ключей соответственно первого и третьего блоков выборки, к входам третьей - выходы второго и первого ключей cooTBCTcfaeHHo второго и четвертого блоков выборки, выход первой логической схемы ИЛИ подключен к одному из входов третьего и четвертого, а выход второй - к одному из входов первого н второго управляемых усилителей, выход третьей логической схемы ИЛИ - к другому входу первого и четвертого, а выход четвертой - к другому входу второго и третьето управляемых усилителей, а датчик положения колеблющегося объекта и датчик положения массы гасителя установлены с угловым смещением, равным смещению электромагнитов, и число каждых из них вдвое меньше числа электромагнитов.
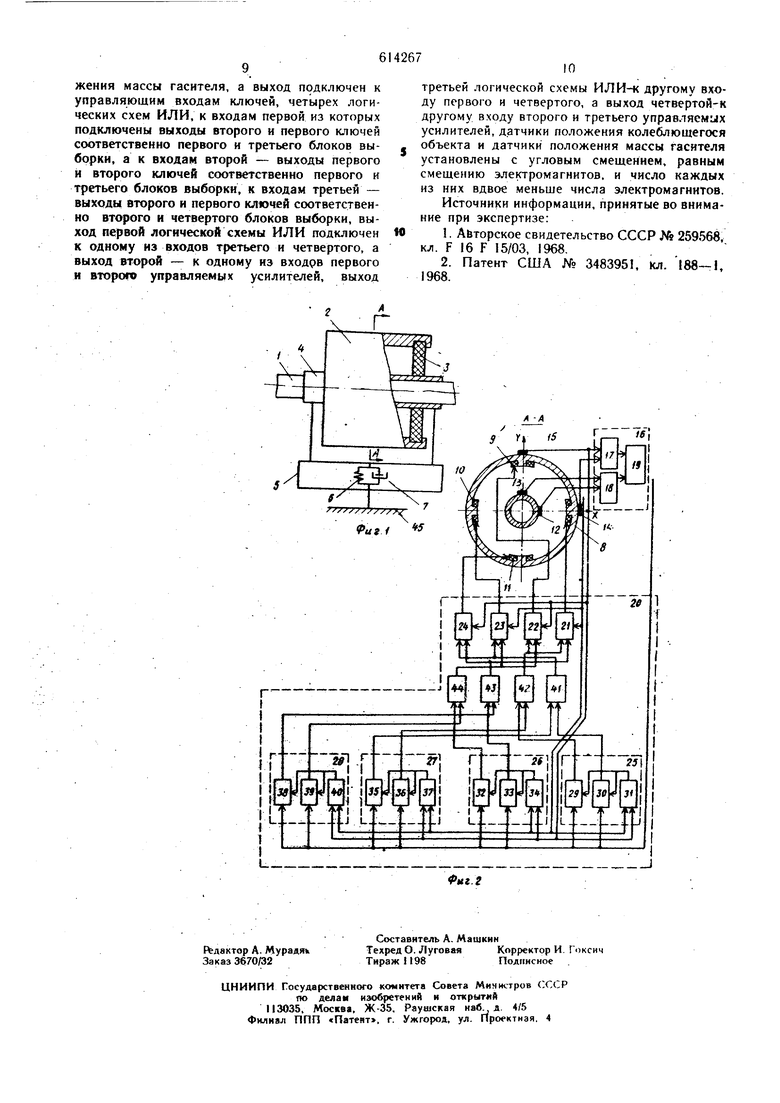
На фиг. I изображен предлагаемый гаси-тель колебаний, общий вид; на фиг. 2 - разрез А--А фиг. 1 и блок-схема устройства. Гаситель содержит колеблющийся объект I, массу 2 гасителя, соединенную .с помощью двух кольцевых упругих элементов 3 е подшипником 4 ско 1ьжения, который в свою очередь соединен с амортизатором 5, состоящим из упругого элемента б и демпфирующего элемента 7. Электромагниты 8-11 расположены через каждые 90 на внутренней поверхности цилиндрической масс. 2 гасителя против часовой стрелки. Датчики. 12 и 13 положения колеблющегося объекта и датчики 14 и 15 положения массы гасителя расположены аналогично, т. е. положение датчика 12 соответствует положению датчика 14, а датчика 13 - датчика is, кроме того, положение датчиков 12 я 14 совггадает с положением электромагнита ,8, а датчиков 13 и 15 - электромагнита 9. Датчик 13 разнесен на 90 против часовой стрелки от датчика 12, а датчик 15 - аналогично от датчика 14. Логический блок 16 состоит из двух идентичных блоков 17 и J8 определения моментного положения, к входам первого из которых подключены выходы датчиков 14 и 15, а к входам второго- выходы датчиков 12 и 13, и блока 19 пропорциональности, входами соединенного с выходами блокЬй 17 и 18. Блок 20 управления состоит из упрайляемых усилителей 21 -24, выходами соедияеины : усилитель 21 - с электромагнитом 8, усйЛйтель 22 - с электромагнито 9, усилитель 23 - с электромагннтом-10, а уснлитель 24 - с электромагнитом Н. К упри ч ля(;мым входам усилителей 21 и 23 подключ-:. выход датчика 14, а к управ.1яемым входам усилителей 22 и 24 - выход датчика 15. Блок 20 управления содержит также блоки выборки. Блок 25 выборки в свою очередь состоит из ключей 29 и 30 и схемы 31 совпадения, блок 26 соответственно - из ключей 32 и 33 и схемы34 совпадения; блок 27 - из ключей 35 и 36 и схемы 37 совпадения, блок 28 - из ключей 38 и 39 и схемы 40 совпадения К основным входам ключей 29, 32, 35, 38 и 30, 33, 36, 39 подключен выход логического блоКа 16. К управляющим входам ключей 29 и 30 подключен выход схемы 3 совпадения, к управляющим входам ключей 32 и 33 - выход схемы 34, к управляющим входам ключей 35 и 36 - выход схемы 37, а к управляющим входам ключей 38 и 39 - выход схемы 40 совпадения. К входам схем 31, 34, 37 .и 40 совпадения подключены выходы датчиков 14 и 15. Блок 20 управления содержит логические схемы 41-44 ИЛИ. К входам схемы 41 ИЛИ. подключены выходы ключей 30 и 35, к входам схемы 42 - выходы ключей 29 и 36, к входам схемы 43 - выходы ключей 33 и 38, а к входам схемы 44 - выходы ключей 32 и 39. Выход схемы 41 подключен к входам усилителей 23 и 24, выход схемы 42 - к в.ходам усилителей 21 и 22, выход схемы 43 - к в)4одам усилителей 21 и 24, а выход схемы 44 - к входам усилителей 22 и 23.
Гаситель работает следующим образом.
При вращении колеблющегося субъекта без радиальных колебаний масса 2 гасителя находится в покое. Напряжение на выходах датчиков 12--15 равно нулю. Но при наличии, например, дебаланса объекта 1 он начинает вращаться, совершая радиальные колебания. Эти колебания будут передаваться через упругие элементы 3 на массу 2 гасителя. Упругие элементы 3 могут быть выполнены в виде резиновых колец или других общеизвестных упругих элементов с одинаковой жесткостью в любом радиальном направлении. Так как масса 2 гасителя соединена через кольцевой упругий элемент 3 с подшипником 4 скольжения, который в свою очередь через амортизатор 5, состоящий из упругого 6 и демпфирующего 7 элементов, присоединен к основанню 45, на движение массы 2 гасителя влияют только радиальные перемещения объекта 1. Таким образам, если колеблющиеся объект 1 совершает и радиальные колебания, масса 2 гасителя тоже будет совершать радиальные колебания с фазой, совпадающей с фазой колебаний объекта I при низких частотах и отстающей на л раднвй при больших частотах колебаний.
Для определения моментных значений радиальных колебаний объекта I и массы 2 гасителя на них установлены датчики 12, 13 и 14, 15 соответственно. Кроме того, датчик 12 относительно датчика 13 и датчик 14 относительно датчика 15 расположены под углом fрадиаи. Поэтому если при радиальных колебания.х выходные сигналыдатчиков 12 и 14 являются напряжениями, пропорциональными X. и Х| соответственно, а датчики 13 и 15 - I/ и (/1 соответственно, то величины моментных значений радиальных колебаний могут быть вычислены: для колеблющегося объекта Z Т, (( для массы гасителя Z, /X 4-yf: (2) Если уравнения (I), (2) представить в виZ signyy/xTTjS. t3) Z, signy.rx/ + у/, (4) Z и Z1 будут определять величину и условный знак направления радиальных колебаний колеблющегося объекта 1 и масЫ гасителя. В блоках 7 и 18 логического блока 16 сигналы :, у и JCu У|, поступающие с датчиков 12, 13 и 14, 15 соответственно, преобразуются с помощью общеизвестных устройств, осуществляющих возведение в квадрат, суммирование, извлечение корня, формирования функции знака и умножения,, в сигналы Z и Zi, которые являются пропорциональными моментами значения радиальных колебаний колеблющегося объекта 1 и массы гасителя. Их знаки положительны, если отклонения колеблющегося объекта I и массы гасителя происходят по всём радиальным направлениям полуплоскостй 0, и отрицательны, если . Сигналы с выходов блоков 17 и 18 поступают на входы блока 19 пропорциональности, который общеизвестными принципами вычисляет разность фаз между колебаниями тел 1 и 2. Полученный линейно возрастающий сигнал положительной полярности, если разность фаз между радиальными колебаниями колеблк щегося объекта 1 и массы гасителя превышает W) (и линейно уменьшающийся сигнал отрицательной полярности, если разноеть фаа меньше 90°), умножается на сигнал, равный разности моментных значений (Z-Zi) (см. уравнения (3,4). Таким образом, на выходе логического блока 16 получается сигнал, пропорциональный К (Z|-Z), где К - коэффициент, линейно зависящий of отклонения разности фаз между моментами значения радиальных колебаний Z и Z i соответственно тел i и 2 «уг 90°. Сигнал с выхода логического-блока 6 поступает иа входы управляемых усилителей 21-24 блока 20 управления, а выходные сигналы усилителей влияют соответственно на электромагниты 8-11 таким образом, чтобы их результирующая, сила совпадала по направлению с моментнымн перемещениями массы гасителя и имела величину, пропорциональную выходному сигналу логического блока 16. Итак, радиальные колебания массы гасителя могут быть описань дифференциальным уравнением вида mZ, -t cfZ,-Z) -f h() О, (3) где m - масса 2 .гасителя; с, h - коэффициенты жесткосгй и дейпffllf ГЪГЧПЯииО г/пПЧГТНГ V oTio« rtit-f « Q 2i, Z|, Z, - MOMCHTHWc ускорсиио, скорость и перемещения радиального колебания массы гасителя соютветствекно; Z, Z -: моментиая скорость и перемещение радиальных колебаний колебательного тела соответственно. При наличии влияния упомянутой дополнительной силы электромагнитов уравнение (5). будет иметь следующий вид: mZ, + (с ± k) (Z,-Z) -f h(Z|-Z) 0, (6) где 4-К, если сила, пропорциональная сигналу K(Zt-Z), препятствует движению и -К, если помогает движению. Очевидно, чтобы направление силы, создаваемой электромагнитами, совпадало с радиальными направлениями колебаний массы 2 гасителя, величина сигнала, поступающего на различные электромагниты с отдельного усилителя 21 или 22, 23, 24, должна распределяться пропорционально сигналу с датчика 15 для электромагнитов 9 и П и с датчика И - для электромагнитов 8 и 10. Для этого на управляемые входы усилителей 22 И 24 подключен выход датчика 15 и на управляемые входы усилнтелей 21 и 23 - выход датчика 14. Регулирование коэффициентов усиления усилителей 21 и 24 происходит таким образом, чтобы направление силы, создаваемой электромагнитами, совпадало с радиальным направлением колебаний массы гасителя, но ее величина была пропорциональной выходному сигналу логического блока 16. Общее управление электромагнитами происходит следующим образом. Схемы 31, 34, 37 н 40 совпадения открываются И выдают сигналы на выходах только при совпадении на входах -f+, -f-, --, -Iнапряженнй соответственно, ключи 29, 32, 35 и 38 пропускают при наличии управляющих сигналов положительные сигналы напряжени), а ключи 30, 33, 36 и 39 пропускают поступающие на вход отрицательные сигналы напряжения, инвентируют и являются закрытыми при отсутствии сигналов на управляющих входах. Если выходные напряжения датчиков 14 н 15 пеложнтельны, открывается схема 31 совпадения н выходным сигналом открывает ключи 29 и 30. Еслн с выхода блока 16 сигнал положительный, пропускает ключ 29 н сигнал с выхода блока 16 через схему 42 ИЛИ поступает на входы управляемых усилителей 21 и 22, сигналы с выходов которых поступают на входы электромагнитов 8 и 9 соответственно.. Так как коэффициент усиления усилителя 21 пропорционален выходному сигналу датчика 14, а усилителя 22 - сигналу датчика 15. величина силы действия притягивающих электромагнитов направлена точно против направления вижения массы 2 гасителя н препятствует вижвяню Массы. Поэтому (по уравнений) (6) веаичивается коэффициент жесткости связи ежду телами i и 2 и разность фаз между кх елебаннямн уменьшается и приближается к 0°. Выходное напряжение блока 16 уменьшя
рующая сила электромагнитов 8 и 9. Аналогично при отклонении упомянутой разности фаз в сторону меньше 90°, напряжение на выходе блока 16 отрицательное и его пропускает ключ 30. Сигнал с выхода ключа 30 через схему 41 ИЛИ поступает на вход усилителей 23 и 24, а сигнал с их выходов - на входы электромагнитов lO и 11 соответственно. Напряжение результирующей силы электромагнитов 1-0 и 11 совпадает с перемещением массы 2 гасителя, и из уравнения (6) следует, что уменьщается жесткость связи между объектом 1 и массой 2, что способствует увеличению разности фаз до 90°. При этом выходное напряжение блока 16 увеличивается (оставаясь отрицательным), как и результирующая сила электромагнитов 10 и 11.
Аналогично работают блоки выборки и другие пары электромагнитов.
Если на выходе датчика 15 сигнал положительный, а на выходе датчика 14 отрицательный, открывается схема 34 совпадения. Если на выходе блока 16 сигнал положительный, пропускает ключ 32 и через схему 44 ИЛИ и усилители 22 и 23 влияет на электромагниты 9 и 10 соответственно, которые способствуют увеличению коэффициента жесткости (см, уравнение (Q). Если на выходе блока 16 сигнал отрицательный, пропускает ключ 33 и через схему 43 ИЛИ и усилители 2 и 24 влияет на электромагниты 8 и 1 соответственно, которые способствуют yмeнь ue жю коэффициента жесткости.
Если на выходах датчиков 4 н 15 сигналы отриаательны-е,открывается схема 37 совпадения. Если ja выходе блока 16 сигнал положительный, припускает ключ 35 и через схему 41 ИЛИ и усилители 21 и 24 влияет на электромагниты 10 Is il соответственно, которые способствуют увеличению коэффициента жесткости. Если на выходе блока 16 сигнал отрицательный, попускает ключ 36 и через схему 42 ИЛИ и усилители 21 и 27 влиябт на электромагниты 8 и 9 соответственно, коToplwe способствуют уменьшению коэффициента жесткостн.
Если иа выходе датчика 15 сигнал отрицательный, а на выходе, датчика 14 -положительный, открывается схема 40 совпадения. Если на выходе блока 16 сигнал «толожительнын, пропускает ключ 38 и через схему 43 ИЛИ и .усилителя 21 и 24 влияет па электромагниты 8 и. 11 соответственно, -которые способствуют увеличению ьоэффициеит.а жесткости. Если на выходе блока 6 сигнал отрицате.льный, пропускает ключ 39 к через схему 44 ИЛИ и усилите.71и 22 и 23 влияет на электромагниты 8 и 9 соответственно, которые снособствуют уменьшению коэффициента жесткостн. .
Выше описана работа устройства в случае если Z|-Z в уравнении (6) положительного :знака. Аналогично будет работать устройство при изменении знака разности на otpицa льный (что имеет место при работ1Б устройстйа, где знаки чередуются
в цикле колебаний). Только в этом случае при упомянутой разности фазы между колебаниями объекта и массы 2 больше 90° на выходе блока 16 будет сигнал отрицательной полярности и соответствующие электромагниты будут работать, как показано выще, увеличивая жесткость, а при разности фаз меньще 90° сигнал на выходе блока 16 будет положительным, жесткость будет уменьшаться соответствующими электромагнитами, как показано выше.
Таким образом, коэффициент жесткости изменяется непрерывно при любых радиальных колебаниях колебательного тела 1 и осуществляется оптимальный режим гашения этих колебаний.
Предложенный гаситель колебаний с автоматической оптимизацией, который легко реализуется для любых систем с колебан1 ями по двум координатам, увеличивает эффективность автоматической оптимизации. Применение вышеизложенного изменения жесткости делает устройство довольно компактным и износоустойчивым.
Формула изобретения
Гаситель колебаний с автоматической оптимизацис-й, содержащий массу гасителя, упругие элементы, соединяющие массу гасителя с колеблющимся объектом, датчики положения
колеблющегося объекта и массы гасителя, логический блок, .блок управления и амортнзатор, устанавливаемый между колеблющимся объектом и основанием, отличающийся тем, чтр, с целью повышения эффективности автоматической оптимизации, масса гасителя выполнена в виде полого магнитопроводного цилиндра, . в полость которого помещают колеблющийся объект, гаситель снабжен электромагнитами, симметрично расположенными на внутренней поверхности цилиндра с угловым смещением
90°, упругие элементы выполнены кольцевыми, логический блок выполнен в виде двух идентичных блоков определения моментных значений положений, к входам одного из которых подсоединены выходы датчиков положения колеблющегося объекта, а к входам другого -выходы датчиков положения колеблющейся массы, и блока пропорциональности, к входам . которого подключены выходы блоков определения моментных значений положений, блок управления выполнен в виде четырех управляеf biK усилителей, каждый из которых соединен . с соответствующим электромагнитом, к управляющим входам первого и третьего усилителей подключен выход одного из датчиков положения массы гасителя, а к управляющим
йходам второго и четвертого усилителей - выход другого да.чнка положения массы гасителя, четырех блоков выборки, каждый из которых включает в себя первый и второй ключи, к основным входам которых подключен выход логического блока, и схему совпадения, входы
которой соединены с выходами датчиков поло
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный гаситель колебаний с автоматической оптимизацией | 1976 |
|
SU729396A1 |
| Устройство для моделирования нелинейных колебательных систем | 1976 |
|
SU610134A1 |
| Способ управления магнитными опорами ротора | 1989 |
|
SU1712691A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1318799A1 |
| Грузовая подвеска крана | 1987 |
|
SU1574529A1 |
| ТРЕХКОМПОНЕНТНЫЙ АКСЕЛЕРОМЕТР | 1984 |
|
RU1259815C |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| Виброгасящее устройство | 1982 |
|
SU1059322A1 |
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ | 1991 |
|
RU2031445C1 |
