(54) ДВУХКООРДИНАТНЫЙ ГАСИТЕЛЬ КОЛЕБАНИЙ С АВТОМАТИЧЕСКОЙ ОПТИМИЗАЦИЕЙ
1
Изобретение относится к виброзащитным системам, в частности к конструкции двухкоординатных гасителей колебаний с автоматической оптимизацией.
Известен гаситель колебаний с автоматической оптимизацией, содержащий массу, упругие элементы, соединяющие массу гасителя с колеблющимся объектом, датчики положения колеблющегося объекта и массы гасителя, логический блок, блок управления и амортизатор 1.
Недостаток этого устройства состоит в отсутствии системы, обеспечивающей уменьщение колебаний, происходящих по двум координатам, или радиальных колебаний, при вращении колеблющегося объекта.
Известен также двухкоординатный гаситель колебаний с автоматической оптимизацией, содержащий датчики перемещения, устанавливаемые на колеблющемся объекте, блоки вычисления модуля и направления колебаний объекта, блок оптимизации и систему управления в виде блока вычисления модуля и блока вычисления направления радиальных колебаний объекта, двух блоков умножения и блока ключей, и релейный элемент 2.
Этот гаситель является наиболее близким по своей технической сущности к изобретению. Однако он имеет недостаточно высокую эффективность гащения колебаний, обусловленную отсутствием возможности 5 оптимального распределения энергий в частотном диапазоне без применения гасящей динамической массы.
Для повыщения эффективности гащения колебаний предлагаемый гаситель снабжен 10 дополнительным блоком умножения, первый вход которого подключен к выходу блока вычисления модуля радиальных колебаний объекта, второй вход его через релейный элемент подключен к выходу блока оптимизации, а выход - к входам блока умножения, а также блоком сравнения частот, первый вход которого подключен к выходу блоков вычисления модуля и направления колебаний объекта, а выход - к входу блока оптимизации, и генератором гармонических колебаний, выход которого соединен со вторым входом блока сравнения частот.
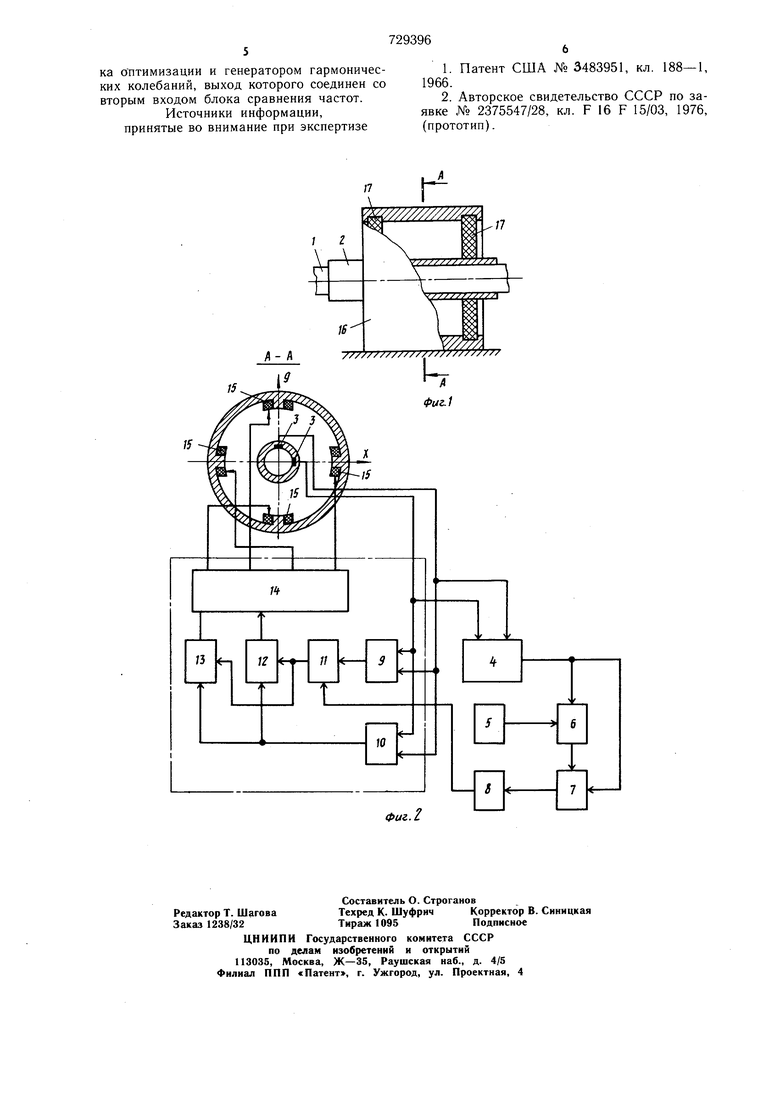
На фиг. 1 изображена конструкция приемной части устройства; на фиг. 2 - дан разрез А-А на фиг. 1 и блок-схема предлагаемого устройства. Гаситель колебаний содержит установленные на объекте 1 и размещенные внутри держателя 2 датчики перемещения 3, блоки 4 вычисления модуля и направления колебаний объекта, генератор 5 гармонических колебаний, блок 6 сравнения частот, первый вход которого подключен к выходу блоков 4 вычисления модуля и направления колебаний объекта, а второй вход - к выходу генератора 5 гармонических колебаний, блок 7 оптимизации, на выходе которого включен релейный элемент 8, и систему управления, выполненную в виде блока 9 вычисления модуля, блока 10 вычисления направления радиальных колебаний объекта, трех блоков 11, 12 и 13 умножения и блока 14 ключей. Первый вход блока умножения 11 подключен к выходу блока 9 вычисления модуля радиальных колебаний объекта, второй вход - через релейный элемент 8 к выходу блока оптимизации 7, а выход блока 11 умножения подключен к входам блоков 12 и 13 умножения. Выходы блока 14 ключей соединены с обмотками электромагнитов 15. Держатель 2, обхватывающий объект 1, может служить подшипником скольжения, eCviH объект совершает вращательное движение. Держатель 2 является подвижной частью вибратора со статором 16. Статор 16 соединен с держателем 2 с помощью кольцевых упругих элементов 17. Размещение четырех электромагнитов 15, симметрично расположенных через 90° во внутренней части статора 16, соответствует размещению датчиков перемещения 3. Устройство работает следующим образом. Объект 1 совершает колебания в плоскости XV. Датчики 3 фиксируют параметры этих колебаний, преобразовывают и посылают их на входы блока 9 вычисления модуля и блока 10 вычисления направления радиальных колебаний. Выходной сигнал блока 9 при этом является пропорциональным величине модуля колебаний объекта 1 в плоскости XV, а выходные сигналы блока 10являются синусами и косинусами угла положения этого модуля в плоскости XV. Умножение с помощью блоков 13 и 12 сигналов, поступающих с выходов блока 10 и 11приводит к тому, что электромагниты 15 оказывают силовое воздействие на держатель 2 и тем самым и на объект 1, совпадающее или не совпадающее с направлением движения объекта и пропорциональное модулю перемещения объекта 1. Если сигнал, поступающий с выхода блока 8 положительный, электромагниты 15 оказывают воздействие на объект, совпадающее по направлению с направлением движения объекта. Это эквивалентно уменьшению жесткости кольцевых упругих элементов 17, т. е. жестКОСТИ между статором 16 и держателем 2. Если сигнал, поступающий с выхода релейного элемента 8 отрицательный - электромагниты 15 оказывают воздействие на объект, направленное против направления его движения. Это эквивалентно увеличению жесткости между статором 16 и держателем 2. Релейным блоком 8 управляет блок 7 оптимизации, связанный по входу с блоками 4 и 6. По сигналам с выхода блоков 4 вычисления модуля и направления колебаний объекта в блоке 6 вычисляется частота этих колебаний, а по сигналам с выхода генератора гармонических колебаний 5 - частота колебаний этого генератора. Эти частоты сравниваются в блоке 6 и на его выходе формируется сигнал, пропорциональный разности этих частот, поступающий затем на блок 7. Таким образом выходной сигнал блока 6, поступающий в блок 7 оптимизации служит оценкой влияния изменения жесткости между объектом 1 и статором 3. По этому сигналу в зависимости от увеличения или уменьщения частоты возмущающих сил блок оптимизации выбирает правильное изменение жесткости по заданному критерию качества, например по минимуму амплитуды колебаний объекта, посылая через релейный элемент 8 на блок умножения 11 сигналы положительной или отрицательной полярности. Таким образом, гашение колебаний предлагаемым гасителем является достаточно эффективным, так как позволяет уменьшить колебания до заданного уровня при варьировании возбуждающей силы в широком диапазоне частот без использования дополнительных средств. Формула изобретения Двухкоординатный гаситель колебаний с автоматической оптимизацией, содержащий датчики перемещения, устанавливаемые на колеблющемся объекте, блоки вычисления модуля и направления колебаний объекта, блок оптимизации и систему управления в виде блока вычисления модуля и блока вычисления направления радиальных колебаний объекта, двух блоков умножения и блока ключей, и релейный элемент, отличающийся тем, что, с целью повыщения эффективности гащения колебаний, он снабжен дополнительным блоком умножения, первый вход которого подключен к выходу блока вычисления модуля радиальных колебаний объекта, второй вход его через релейный элемент подключен к выходу блока оптимизации, а выход - к входам блоков умножения, а также блоком сравнения частот, первый вход которого подключен к выходу блоков вычисления модуля и направления колебаний объекта, а выход - к входу блока оптимизации и генератором гармонических колебаний, выход которого соединен со вторым входом блока сравнения частот.
Источники информации, принятые во внимание при экспертизе
1.Патент США №3483951, кл. 188-1, 1966.
2.Авторское свидетельство СССР по заявке № 2375547/28, кл. F 16 F 15/03, 1976, (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования нелинейных колебательных систем | 1976 |
|
SU610134A1 |
| Гаситель колебаний с автоматической оптимизацией | 1976 |
|
SU614267A1 |
| Устройство для определения амплитудночастотных характеристик | 1976 |
|
SU581387A1 |
| Устройство для вычисления динамических податливостей системы | 1979 |
|
SU941939A1 |
| Устройство для полунатурногоМОдЕлиРОВАНия | 1976 |
|
SU822218A2 |
| Устройство для моделирования виброзащиты оператора | 1979 |
|
SU864304A1 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТЕР-ГЕНЕРАТОРОМ И БЛОК ФОРМИРОВАНИЯ ЗАДАННЫХ ЗНАЧЕНИЙ СОСТАВЛЯЮЩИХ ВЕКТОРА ТОКА СТАТОРА | 2003 |
|
RU2268392C2 |
| Устройство для измерения деформаций магнитного диска | 1976 |
|
SU557257A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СТАРТЕР-ГЕНЕРАТОРОМ С БЛОКОМ ФОРМИРОВАНИЯ ЗАДАННЫХ ЗНАЧЕНИЙ ТОКА ВОЗБУЖДЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА ТОКА СТАТОРА ПО ПРОДОЛЬНОЙ И ПОПЕРЕЧНОЙ ОСЯМ | 2000 |
|
RU2200871C2 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
15
15
/7
Фиг. 2
