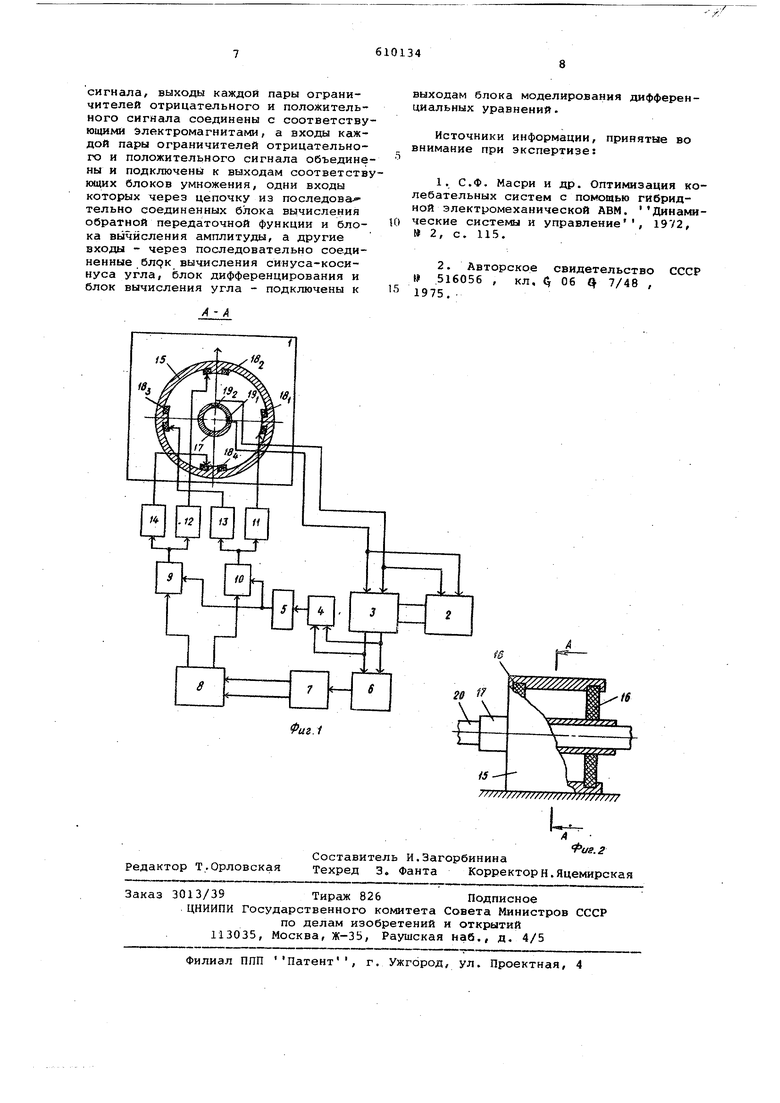
54) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЛИНЕЙНЫХ КОЛЕБАТЕЛЬНЫХ СИСТЕМ ла - подключены к выходам блока моделирования дифференциальных уравнений. На фиг.1 приведена структурная схе ма устройства для моделирования нелинейных колебательных систем; на фиг.2 воэбудитель колебаний, разрез. Устройство содержит возбудитель ко лебаний I, выполненный в виде электри ческой машины, блок 2 оптимизации, блок 3 моделирования дифференциальных уравнений, блок 4 вычисления амплитуды, блок 5 вычисления обратной переда точной функции, блок б вычисления угла, блок Дифференцирования 7, блок 8 вычисления синуса-косинуса угла, блоки 9 и 10 умножения, ограничители 11, 12 отрицательного сигнала и ограничители 13 и 14 положительного сигнала. В состав возбудителя колебаний 1 входят статор 1-5, кольцевые упругие элементы 16, держатель 17, электромагниты I8i-I8j и датчики 19j, и 192 параметров. Исследуемый объект 20 охвачен держателем 17, который может служить под шипником скольжения, если исследуемый объект вращается. Статор 15 соединен с держателем 17 кольцевыми упругими элементами 16, На внутренней поверхности статора 15 симметрично через каждые 9О расположены четыре электромагнита 18 и 18. Между держателем 17 и исследуемым объектом 20 помещены два датчика 19j И и 19 параметров. Положение датчиков 19, и 192 соответствует положению электромагнитов 18,. Датчики 19j и 192 подсоединеньа ко. входам блока 3 моделирования блока 2 оптимизации. Блоки 3 и 2 связаны между собой. Выходы блока 3 через пос ледовательно соединенные блоки 4 вычисления амплитуды и блок 5 вычисления обратной передаточной функции, а также через последовательно соединенные блок б вычисления угла, блок 7 ди ференцирования и блок 8 вычисления си нус-косинуса угла соединены .соответст венно с первыми и вторыми входами бло ков 9 и 10 умножения. Вьщод блока 10 через ограничитель 11 отрицательного сигнала подключен к обмотке электромагнита 18 и через ограничитель 13 по ложительного сигнала - к обмотке элек ромагнита IBj. Выход блока 9 через ог раничитель 12 отрицательного сигнала подключен к обмотке электромагнита 18 а через ограничитель 14 положительног сигнала - к обмотке электромагнита 18 Устройство работает следующим образом. Исследуемый объект 20 совершает ко лебания в плоскости, характеризуемой координатами X, У.Характер этих колебаний зависит и от известной части динамической системы, которую необходимо оптимизировать с целью улучшения работы исследуемого объекта и которая описывается математически. Взаимодействие исследуемого объекта с известной частью систег-м фиксируют датчики 19 и 19 параметров. Это взаимодействие осуществляется через возбудитель 1 колебаний, который имитирует влияние известной части системы на исследуелмй объект 20. При этом оптимизируемая часть динамической сисTeNiH описывается математически и моделируется с помощью элементов аналоговых вычислительных машин в блоке 3 моделирования. Например, если взаимодействие объекта 20 с известной частью систе 4Ы про-исходит в плоскости ХУ, поведение известной части систе 1Ы в частном случае описывается уравненияNiH; (x- JCj4x.-,Sh r,, (I) )CH( 2) где Х,У,Х У - моментные значения положения и скорости объекта 20 по координатам X и У соответственно состаляюшде коэффициентов жесткости по координатам X и У соотвественно; - составляющие коэффициентов вязкого трения по .координатам X и У соответственноР.,Ру- состаЕЛЯющие реакций взаимодействия между известной частью системы и объе;с;сс 20 по координатам X и У соответствекко; мом,гные значения кинематических возбу кдений в известной части системы по коор.цннатам X и У, Блок 3,- связанный с блоком 2 оптимизаций, позволяет известными методами опткьадэировать параметры или сруктуру лзаестной части системы и определяет моментные координаты X и У положения ;;- :ccлeдye 4Oгo объекта 20.Для этого в блор: 3 поступают сигналы с датчиков 19j и 19,2 пропорциональные составляющим реакции Р. и Ру соответственно, и блок 3, например, по уравнениям (1) и (2) вычисляет моментные значения положения по X и У. Чтобы осуществить целостность всей динамической системы, . объекта 20 и моделируемой час-гн системы блоком 3, положение держателя 17 исследуемого объекта должно соответствовать значениям сигналов X, У с блока 3. Чтобы это обеспечить,сигналы с выхода блока 3 поступают в блок 6 вычисления угла по уравнению (p a ctgкоторый выдает сигнал, прспорЦиональьий значению угла действия суммарной .реакции со стороны известной части динамической системы. На выходе блока дифференцирования 7 получают производные ф и (р упомянутого угла. По этим производным в блоке 8 вычисляются известными мeтoдa /iи gin i исоэц. Сигнал, пропорциональный б m Ф , пос тупает в блок 9 умножения, а сигнал, пропорциональный со5 фу - в блок 10 умножения. На вторые входы блоков 9 и 10 умножения поступают выходные сиг налы с блока 3 через блок 4 вычислени амплитуды, на выходе которого получают сигнал, пропорциональный модулю ам плитуды перемещения держателя 17,т.е. и через блок 5 вычисления У-. Обратной передаточной функцииW/p пропорциональный величине z. W(p) . Таким образом, на выходе блока 9 умножения получают сигнал, пропорциональный 2; W/P) 6irt V , и на выходе блока 10 - сигнал, пропорциональ ный 5: W,pj соб V . Выходной сигнал поступает с блока 9 в обмотку электро магнита 182 через ограничитель 12 отрицательного сигнала и в обмотку элек ромагнита 18 - через ограничитель 14 положительного сигнала. Выходной сигнал блока 10 через ограничитель 11 от рицательного сигнала поступает в обмотку электромагнита 1Вj а через ограничитель 13 положительного сигналав обмотку электромагнита 18. При этом с выхода блока 10 положительный -сигнал, пропорциональный поступает в обмотку Срб СР .; электромагнита 18 и отрицательный в обмотку 18д, ас выхода блока 9 положительный сигнал, пропорциональный u-W{) 1 поступает в обмотку электромагнита 18 и отрицательный- в обмотку электромагнита 18 . Так, например, при изменении ф от О до сигналы, пропорциональные ZW, С06 Ф и Z W(p) am р, положительны . Они поступают в электр магниты 18 и 182 соответственно, и электромагниты 18 и 18 развивают силу X притяжения по направлению X (фиг.1) и силу У по направлению У. Если на эти электромагниты подаются токи, пропорциональные выходным сигна лам блоков 9 и 10, то развиваемые ими силы будут пропорциональны поступающим на них сигналам, т.е. X.z;-Wfp,-CO& py СЭ) У«2,- А/ -й|Пф. (4) Модуль результирующей силы, учитывая (3) , (4) , и направление tp afct -| qfotg Цфгф. (ь) Если кольцевые упругие элементы 16 обеспечивают одинаковую жесткость С по всем радиальным направлениям, а масса держателя 17 равна m , то пере мещение держателя по радиальному на.правлению Z происходит при действии с лы Zj (уравнение 5)по закону,определяе мому уравнением .j Z. (Т) Если сила 1 входной сигнал, а оордината Zj выходной, то передаточая ФУНКЦИЯ 2, 1 Z. С При этом учитывая (8) и вычисляя локом 5 обратную передаточную функию , т.е. , з уравнения (5) находят )7 ткуда Таким образом, уз уравнений (6) и (11) следует, что перемещение держателя 172. по (11) (6) соответствует по модулю и направлению .значениям сигналов с выхода блока 3. Аналогично процесс происходит при изменении ф от 90 до 180 также от 180 до 270и от 270 до 360 но при этом работают соответственно электромагниты iBj и 18, 18 и 18, 18 и 18. Перемещение держателя 17 при этом также пропорционально выходным сигналам блока 3. Таким образом, оптимизируя блоком 2 параметры или структуру известной части динамической системы, моделируемой в блоке 3, изменяют состояния системы, которые характеризуются выходными сигналами блока 3 и .которые осуществляются сигналами заданными с помощью описанной .схемы. Формула изобретения Устройство для моделирования нелинейных колебательных систем, содержащее возбудитель колебаний, выполненный в виде электрической машины, к статору которого посредством кольцевых упругих элементов присоединен держатель, на котором на взаимно перпендикулярных осях размещены два датчика параметров, на внутренней поверхности статору н-а тех.же взаимно пер,пендикулярных осях установлены четыре электромагнита, выходы датчиков параметров соединены со входами блока оптимизации и блока моделирования дифференциальных уравнений, которые соединены двусторонней, линией связи, отличающееся тем, что, с целью расширения области применения за счет моделирования взаимодействия частей динамической системы в плоскости,оно содержит блок вычисления амп- литуды, блок вычисления обратной передаточной функции, блок вычисления угла, блок дифференцирования, блок вывычисления синуса-косинуса угла, блоки умножения и две пары ограничителей отрицательного и положительного