также закреплены зажимы 19 и ограничители 20.
Устройство работает следующим образом.
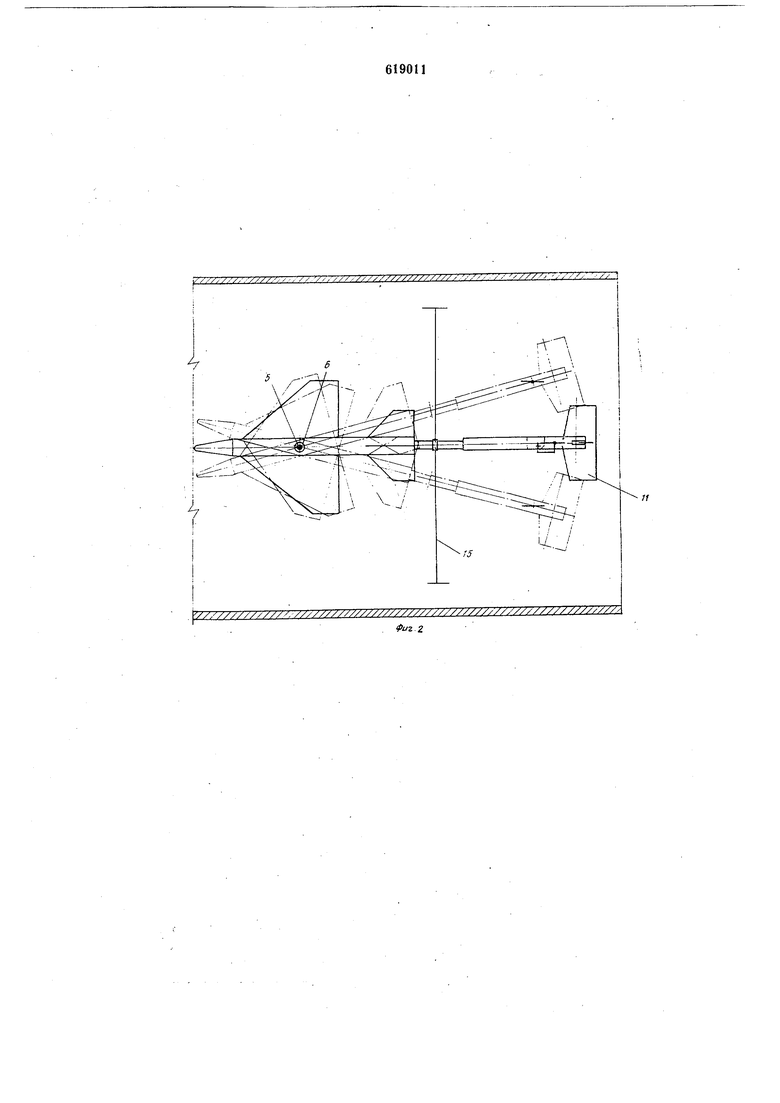
Модель 7 устанавливается на полой стойке 1. Датчики 6 соединены обратной связью с механизмами -12 и 13 управления и с пультом оператора в кабине управления аэродинамической трубой (пульт управления не показан). Оператор задает углы атаки и скольжения модели 7, а датчики 6 включают механизмы управления до достижения заданных (углов.
Отклонение модели 7 осуществляется с помощью аэродинамических сил, возникающих на большом плече при отклонении рулей 10 и М с помощью механизмов .12 и 13 управления до достижения равновесия сил, действующих на исследуемую модель и рули 10 и 11 при заданных углах атакд и скольжения.
Для предотвращения колебаний модели 7 при испытаниях вследствие возможной турбулентности потока в аэродинамической трубе 3 служит приспособление для фиксации положения модели.
При перестановке углов модели 7 зажимы 19 р-азжимают, а после установки на заданные углы зажимают по команде опеpiaTopa, фиксируя модель 7 и предотвращая ее колебания. При перестановке модели 7 на другие углы н расфиксации тросов 15 путем разжатня зажимов 19 из-за отклонения рулевых поверхностей возможно рыскание модели 7.
Для устранения резкого рыскания модели 7 предназначены противовесы 16, при этом ограничители 20 ограничивают величину втягивания тросов 15 внутрь аэродинамической трубы 3 свыше необходимой для максимальных углов модели согласно программе исследований.
Предложенное техническое решение значительно увеличивает производительность аэродинамической трубы путем сокращения времени перестановки модели в процессе эксперимента.
Формула изобретения
Устройство для установки модели в аэродинамической трубе, содержащее стойку с шарнирной державкой для модели и привод для изменения ее положения, о тлишающееся тем, что, с целью упрощения конструкции и сокращения времени испытаний, устройство снабжено насадкой в виде полой трубы, устанговленной в хвостовой части модели с возможностью перемещения вдоль ее горизонтальной оси
и снабженной дистанционно управляемыми вертикальными и горизонтальными рулями управления.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДВЕСКИ ПОЛЫХ УПРУГО-ДИНАМИЧЕСКИ-ПОДОБНЫХ МОДЕЛЕЙ КРЫЛАТЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В АЭРОДИНАМИЧЕСКИХ ТРУБАХ | 1972 |
|
SU1840314A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКИХ И НЕСТАЦИОНАРНЫХ АЭРОДИНАМИЧЕСКИХ ПРОИЗВОДНЫХ МОДЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531097C1 |
| СПОСОБ ПОДАВЛЕНИЯ БОКОВЫХ КОЛЕБАНИЙ МАНЕВРЕННОГО САМОЛЕТА НА БОЛЬШИХ УГЛАХ АТАКИ | 2009 |
|
RU2401220C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| Крупноразмерная аэродинамическая модель | 2015 |
|
RU2607675C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| Комбинированная динамически-подобная аэродинамическая модель для разных видов аэродинамических испытаний | 2023 |
|
RU2808290C1 |
| Устройство для измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе, модель планирующего парашюта для испытаний в аэродинамической трубе, способ измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе | 2017 |
|
RU2655713C1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ ВРАЩАТЕЛЬНЫХ ПРОИЗВОДНЫХ АЭРОДИНАМИЧЕСКИХ СИЛ И МОМЕНТОВ МОДЕЛИ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 2012 |
|
RU2522794C1 |

13
/гтУ,
20,
-17
