(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОМЫШЛЕНЕ1ЫМ РОБОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ | 2003 |
|
RU2238184C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ | 2005 |
|
RU2279971C1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для записи программы контурного управления промышленным роботом | 1978 |
|
SU930255A1 |
| СИСТЕМА УПРАВЛЕНИЯ АНТЕННОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2024907C1 |
| Устройство для записи программы промышленным роботом | 1978 |
|
SU706823A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2028930C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2228834C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2212329C1 |
1
Изобретение относится к области радиотехники и может быть использовано для управления микропрограммными роботами со сложной кинематической схемой.
Известно устройство для управления промьошленным роботом, содержащее пуль программного управления, приводы, программоноситель, датчики положения исполнительного органаJ l . Это устройство требует большого объема памяти и имеет невысокую точность позиционирования.
Наиболее близким техническим решением к данному изобретению является устройство, содержащее последовательно сое.циненные блок памяти и блок считывания программы и по каждой регулируемой координате последовательно соединенные сумматор, привод, исполнительный механизм и датчик положения исполнительного механизма, выход которого подключен к первому входу сумматора 2 .
Недостатком этого устройства является наличие интерполятора, представляющего собой сложное вычислительное устройство.
Целью изобретения является упрощение и повышение помехозащищенности устройства.
Это достигается тем, что устройство содержит последовательно соеди-. ненные микроприводы, редукторы, физическую модель исполнительного механизма робота и датчики положения физической модели, выходы которых подключены ко входам соответствующих сумматоров, а входы микроприводов соединены с соответствующими выходами блока считывания программы.
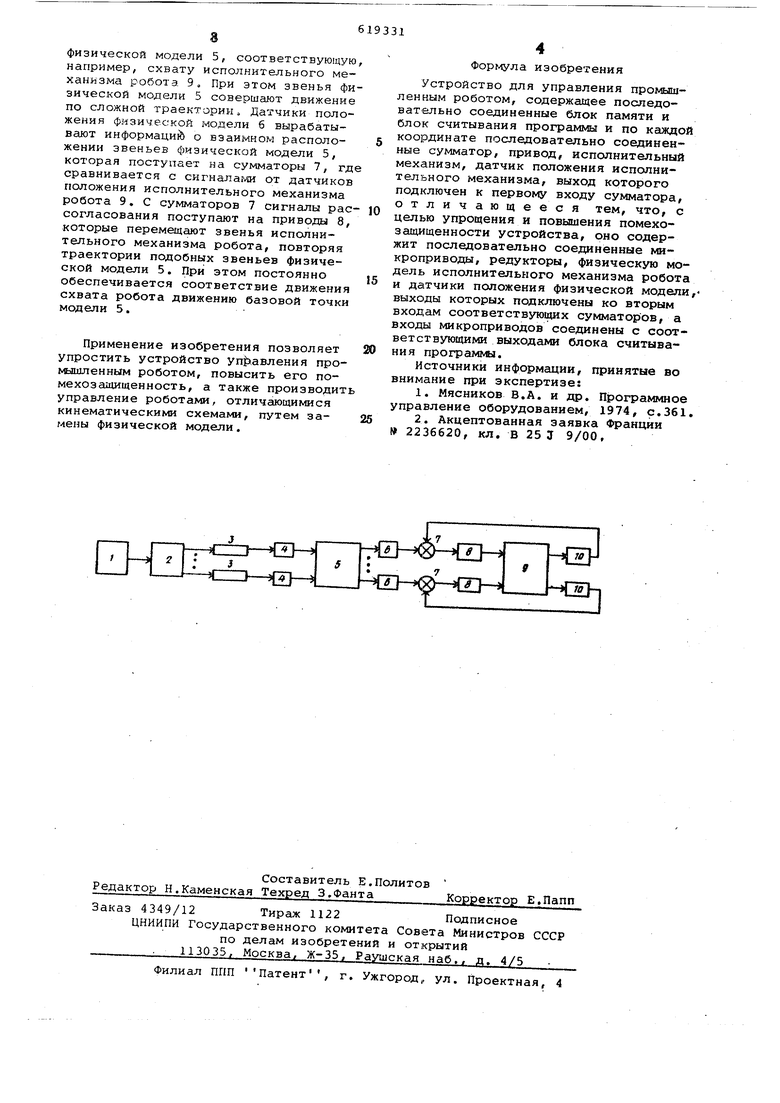
На чертеже представлена блок-схема устройства, на котором показаны блок памяти 1, блок считывания программы 2, микроприводы 3, редукторы 4, физическая модель 5, датчики положения 6 физической модели, сумматоры 7, приводы 8, исполнительный механизм робота 9, датчики положения исполнительного механизма 10.
Устройство работает следующим образом.
Координаты перемещений из блока памяти 1 считываются блоком считывания программы 2, обрабатываются микроприводами 3, которые через редукторы 4 приводят в движение в программируемом направлении базовую точку
физической модели 5, соответствующую, например, охвату исполнительного механизма робота 9. При этом звенья физической модели 5 совершают движение по сложной траектории« Датчики положения физической модели б вырабатывают информации о взаимном расположенин звеньев физической модели 5, которая поступает на сумматоры 7, где сравнивается с сигналагли от датчиков положения исполнительного механизма робота 9. С сумматоров 7 сигналы рассогласования поступают иа приводы 8, которые перемещают звенья исполнительного механизма робота, повторяя траектории подобных звеньев физической модели 5. При этом постоянно обеспечивается соответствие движения схвата робота движению базовой точки модели 5.
Применение изобретения позволяет упростить устройство уп аавления промышленным роботом, повысить его помехозащищенность, а также производить управление роботами, отличающимися кинематическими схемами, путем замены физической модели.
Формула изобретения
Устройство для управления промышленным роботом, содержащее последоватально соединенные блок памяти и блок считывания программы и по каждой координате последовательно соединенные сумматор, привод, исполнительный механизм, датчик положения исполнительного механизма, выход которого подключен к первому входу сумматора, отличающееся тем, что, с целью упрощения и повышения помехозащищенности устройства, оно содержит последовательно соединенные микроприводы, редукторы, физическую модель исполнительного механизма робота и датчики положения физической моделивыходы которых подключены ко вторым входам соответствующих сумматоров, а входы микроприводов соединены с соответствующими выходами блока считывания программы.
Источники информации, принятые во внимание при экспертизе:
