(54) УСТРОЙСТВО ДЛЯ ЗАПИСИ ПРОГРАММЫ КОНТУРНОГО УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ
t
Изобретение относитя к робототехнике и может быть использовано при записи программы управления перемещением рабочего органа npoMbiuineHHoro робота но :заданной траектории.
Извествы устройства для записи программы контурного управления промышлен- ным роботом, содержащее рукоятку обучения, связанную с выходным звеном робота через датчики положения и сна&женную копирующим рбликом с датчиком перекрещения, подключенным к приводу программоносителя, по каждой регулируемой координате робота привод, выход которого через датчик положения привода соединен с первым входом сумматора, а вход через выключатель - с каналом считывания, а также переключатель, в одном положении которого выход датчи ка связан с вторым входом сумматора, выход которого подключен к каналу записи, а в другом - с входом привода робота-fl.
Однако это устройство является сяожш 1М и требует синхронизации сжорости перемещещш программоносителя и выходного звена робота.
близка по-Ттехнической сутцвости к изобретению является устррйство, содержащее программоноситель, привод программоносителя и по каждой регулщ уемой координате последовательно
to соединенные датчик перемещения органа управления, подвижный контакт которого связан с выходным звеном исполнительно-, го органа робота, элемент памяти и генератор импульсов, выход; которого
15 подключен непосредственно к соответ ствующему входу программоносителя и через первый ключ к входу соотвётствукушего привода исполнительного органа робота 2.
К
Недостатком известного устройства является его сложность, связанная, гла&ным образом, с наличием интерполятора, что снижает надежность устройства.
Цель изобретения - удрощение устройства.
Цель достигается тем, что устройство содержит элемент ИЛИ и по каждой регулируемой координате второй ключ, механически связанный с выходом соответ ствующего датчика перемешешга органа управления, выход каждого второго ключа-соединен с вторым входом соответствующего элемента памяти, входы эле.мента ИЛИ подключены к выходам первых ключей, а выход - к входу привода программоно сителя.
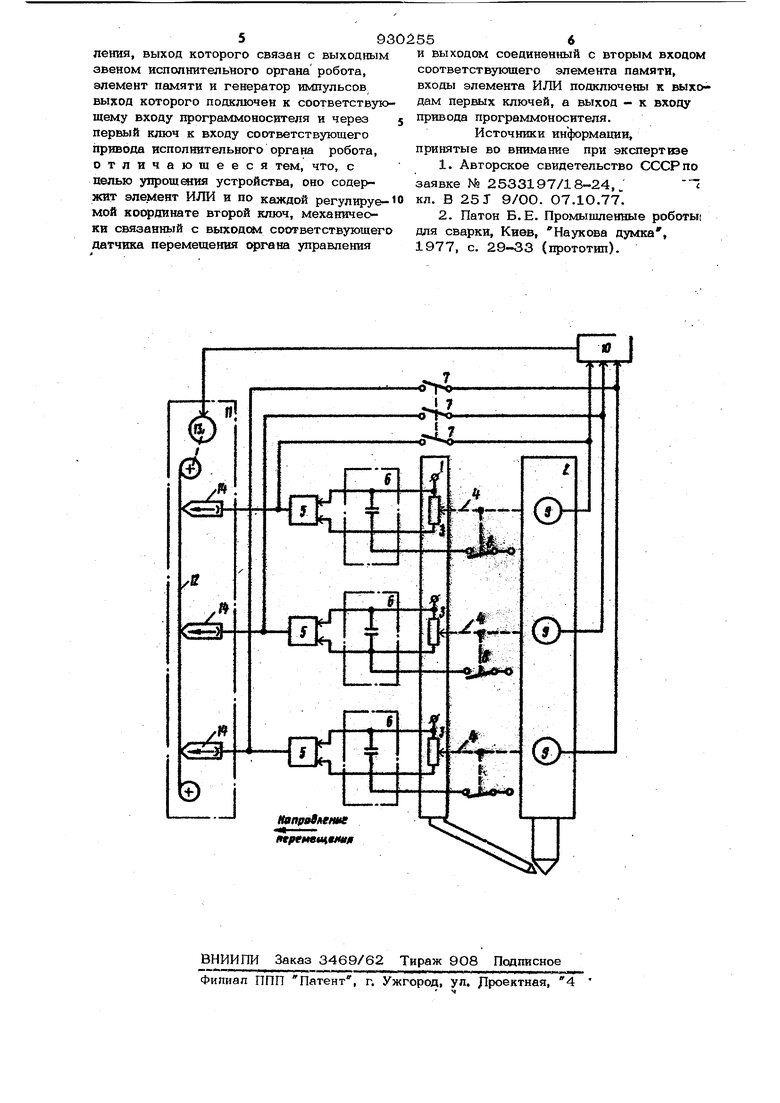
На чертеже представлена функциональная схема устройства.
Устройство содержит орган 1 управления, выходное звено 2 робота, дат чик 3 переметаения органа управления, выход 4 датчика перемещения органа управления, генераторы 5, .элементы 6 памяти, первые ключи 7, вторые ключи 8 приводы 9 исполнительного органа робота, элемент ИЛИ 10, блок 11 памяти, программоноситель 12, привод 13 программоносителя, каналы 14 записи.
Устройство работает следующим образом.
В исходном положении первые ключи 7 разомкнуты, орган 1 управления находится относительно выходного jaaeHa 2 робота в нулевом (зафиксированном) положении, вторые ключи (конечныеВыключатели) 8 замкнуты, через последние на элементы б памяти постуйает сигнал Сброс, и ш выходах генераторов 5 импульсов сигналы отсутствуют. Привод 13 программоносителя 12 также отключен.
Для записи программы оператор перемещает орган 1 управления в очередную опорную точку программируемой траектории. Величина интервала между опорными точкамив случае криволинейной траекторий выбирается в зависимости от тре буемой точности ее аппроксимации от-. резками прямых линий. Орган 1 управления перемещают на каждом интервале между опорными точками при неподвижном выходном звене 2 робота. С началом перемещения органа 1 управления относительно выходного звена 2 робота сигнал с выхода 4 датчика перемещения органа управления 1 размыкает вторые ключи 8. На выходе элементов 6 памяти появляется сигнал, пропорциональный величине перемещения органа 1 управления по данной оси- координат. На выходе генераторов 5 также появляются импульсы, частота которых пропорциональна величине перемещения органа управления 1. После установки органа управления 1 в очередную точку траектории оператор замыкает первые ключи 7, подавая тем самым команду на запись величин приращений по координатам на данном интервале в на перемещение выходного звена 2 робота в положение, зашв аемое органами упраЕшения 1. При этом .оператор удерживает орган управления 1 в очередной точке до окончания записи программы на данном интервале. При замыкании первых ключей 7 импульсы с выхода генераторов 5 импульсов поступают на.выходь соответствующих приводов 9 робота и на входы элемента ИЛИ 10. С выхода последнего поступает сигнал на включени привода 13 программоносителя. Поскольку с выходов генераторов 5 импульсов в каналы 14 записи поступают последовательности импульсов, частота которых по каждой оси координат пропорциональна величине перемещения органа 1 управления, то на cooi ветствующие дорожки программоносителя 12 записывается уже проинтерполированная программа многокоординатного управления. Запись сигналов генераторов 5 импульсов на программоноситель 12 продолжается до момента, когда выходное звено 2 робота займет по всем осям положение, занимаемое органом 1 управления. -Этот момент регистрируется по каждой оси координат выходом подвижного контакта в первоначальное (нулевое) положение и замыканием второго ключа 8, сбрасывающего элемент 6 памяти в нулевое положение. Отсутствие сигнала на выходе элемента ИЛИ 10 и останов при этом привода 13 программоносителя свидетельствует о том что выходное звено 2 достигло нового положения, занимаемого органом 1 управления по всем осям координат робота. Перемещение йыходного звена 2 происходит по прямолинейной траектории.
Применение изобретешш позволит значительно упростить устройство для записи программы контурного управления промышленным роботом. .
Формула изобретения
Устройство для записи программы контурного управления промышленным роботом, содержащее программоноситель, привод программоносителя и по каждой регулируемой координате последовательно соединенные датчик перемещения органа управлеиия, выход которого связан с выходным звеном исполнительного органа робота, элемент памяти и генератор импульсов выход которого подключен к соответствующему входу программоносителя и через первый ключ к входу соответствующего привода исполнительного органа робота, отличающееся тем, что, с целью упрощения устройства, оно содержит элемент ИЛИ и по каждой регулируемой косфдинате второй ключ, механически связанный с вь1ходом соответствующего датчика перемещения сфгана управления
и выходом соединенный с вторым входом соответствующего элемента памяти, входы элемента ИЛИ подключены к выходам первых ключей, а выход - к входу привода программоносителя.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР по заявке № 2533197/18-24, кл. В 25J 9/ОО. 07.10.77.
2.Патон Б.Е. Промыщленные роботы: для сварки, Киев, Наукова думка , 1977, с. 29-33 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для записи программы управления промышленным роботом | 1977 |
|
SU726494A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
| Контурная система программного управления многокоординатным манипулятором | 1977 |
|
SU740491A1 |
| Устройство для управления многозвенным манипулятором | 1985 |
|
SU1257613A1 |
| Устройство для контурного управления промышленным роботом | 1976 |
|
SU609615A1 |
| Устройство для записи программыупРАВлЕНия пРОМышлЕННыМ РОбОТОМ | 1978 |
|
SU811203A1 |
| Устройство для управления промышленным роботом | 1981 |
|
SU970320A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
