Изобретение относится к области робототехники и может быть использовано для управления роботом со сложной кинематической схемой.
Известно устройство для управления промышленным роботом [1], которое содержит последовательно соединенные блок памяти и блок считывания программы и по каждой регулируемой координате после соединения сумматор, привод, исполнительный механизм и датчик положения исполнительного механизма, выход которого подключен к первому входу сумматора.
Наиболее близким по технической сущности к заявляемому объекту является устройство для управления промышленным роботом [2], содержащее последовательно соединенные микроприводы, редукторы, физическую модель исполнительного механизма робота и датчики положения физической модели, выходы которого подключены по входам соответствующих сумматоров, а входы микроприводов соединены с соответствующими выходами блока считывания программы. Также устройство для управления промышленным роботом содержит блок памяти, блок считывания программы, блок управления приводами, приводы, исполнительный механизм промышленного робота и датчики положения.
Недостатком данного устройства являются естественные ограничения приводов физической модели по массогабаритным показателям, что сужает область динамических возможностей устройства управления.
Изобретение направлено на улучшение динамических показателей робота, в частности приемистости по скорости.
Это достигается тем, что оно снабжено блоком проверки окончания цикла, блоком вычисления производных, блоком вычисления шага и решающим блоком, при этом выходы блока считывания программы и датчиков положения соединены с блоком вычисления производных, выход блока вычисления производных соединен с блоком вычисления шага, выход блока вычисления шага соединен с решающим блоком, а решающий блок соединен с блоком проверки окончания цикла, имеющим выходы "да" и "нет", причем выход “да” соединен с блоками управления приводами, а выход “нет” соединен с блоком вычисления производных - коэффициентов разложения ряда Тейлора, ограничиваясь линейными членами.
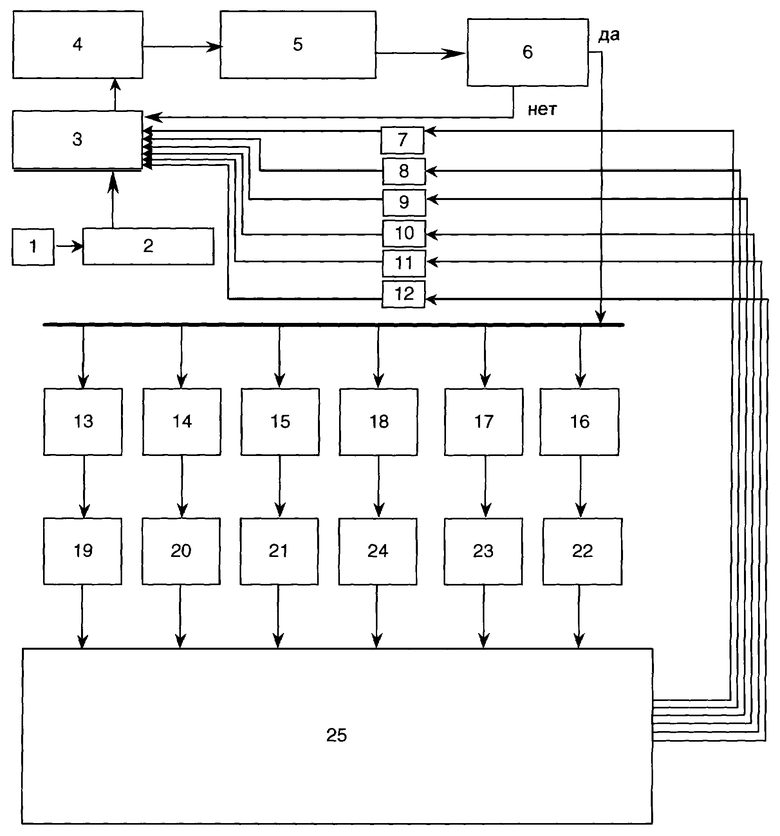
На чертеже фиг.1 представлена блок-схема устройства управления промышленным роботом. Устройство состоит из следующих блоков: блок памяти 1, блок считывания программы 2, блок вычисления производных 3, блок вычисления шага 4, решающий блок 5, блок проверки 6, датчики положения 7-12, блоки управления двигателями 13-18, двигателями 19-24, промышленный робот 25.
Устройство работает следующим образом.
Блок памяти 1 содержит информацию о траекториях схвата робота. Координаты перемещения из блока памяти считываются блоком считывания программы 2. Сигнал с блока считывания программы поступает на блок вычисления производных 3. Блок вычисления производных 3 вычисляет  - коэффициенты разложения ряда Тейлора согласно формуле (1), где α - обобщенная координата. Далее сигнал с блока вычисления производной 3 поступает на блок вычисления шага 4. Блок вычисления шага 4 выбирает шаг уi-уi-1, в 10 раз меньший, чем
- коэффициенты разложения ряда Тейлора согласно формуле (1), где α - обобщенная координата. Далее сигнал с блока вычисления производной 3 поступает на блок вычисления шага 4. Блок вычисления шага 4 выбирает шаг уi-уi-1, в 10 раз меньший, чем  (i-номер итерации). Вычисление шага и производной - коэффициенты разложения ряда Тейлора - осуществляется для каждой степени подвижности манипулятора.
(i-номер итерации). Вычисление шага и производной - коэффициенты разложения ряда Тейлора - осуществляется для каждой степени подвижности манипулятора.

Сигнал с блока вычисления шага 4 подается на решающий блок 5, который решает систему линейных уравнений, состоящую из N уравнений с N неизвестными относительно (α(i)-α(i-1))j (где N - число степеней подвижности промышленного робота, j - номер степени промышленного робота), каждое из которых соответствует одной степени подвижности промышленного робота. Решение системы уравнений поступает на блок проверки 6, который принимает решения о дальнейшем продолжении проведения итераций. По окончании цикла итерации сигнал с блока проверки 6 поступает на шесть блоков управления двигателями 13-18. Блоки управления двигателями 13-18 представляют собой ШИМ - контроллеры двигателей 19-24 промышленного робота 25 и силовые транзисторные ключи. Датчики положения 7-12 считывают информацию о текущем положении звеньев промышленного робота и выдают ее в блок вычисления производной 3. Таким образом, промышленный робот отрабатывает заданную траекторию.
Применение изобретения позволяет упростить устройство управления при сохранении точности воспроизведения заданных траекторий.
Особенностью устройства управления промышленным роботом является его способность управлять роботом практически с любой кинематической схемой.
Источники информации
1. Акцептованная заявка Франции №2236620, кл. В 25 J 9/00.
2. А.с. СССР №619331/ О.Т. Сахаров, С.М. Гуревич, А.И. Вантух и др. - заявка №2416965/25-24 от 14.10.76, опубликована 15.08.78. Бюл. №30, МКИ4 В 25 J 9/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ | 2005 |
|
RU2279971C1 |
| Устройство для управления промышленным роботом | 1976 |
|
SU619331A1 |
| ПОЗИЦИОННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2079732C1 |
| Устройство программного управления роботами гальванической линии | 1983 |
|
SU1124250A1 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ДЛЯ ОБОРУДОВАНИЯ, УСТАНОВЛЕННОГО ПРЕИМУЩЕСТВЕННО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1997 |
|
RU2117976C1 |
| Система позиционного управления промышленным роботом | 1979 |
|
SU877473A1 |
| Устройство для управления автоматизированным прессовым оборудованием | 1983 |
|
SU1131678A1 |
| Процессор матричной вычислительной структуры для решения дифференциальных уравнений в частных производных | 1985 |
|
SU1280385A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| УНИВЕРСАЛЬНО-РАСПРЕДЕЛЕННАЯ ГИБРИДНАЯ СИСТЕМА УПРАВЛЕНИЯ КОЛЛАБОРАТИВНЫМ МНОГОЦЕЛЕВЫМ РОБОТОМ С МАШИННЫМ ЗРЕНИЕМ | 2018 |
|
RU2710709C1 |
Изобретение относится к области робототехники и может быть использовано для управления роботом со сложной кинематической схемой. Технический результат - улучшение динамических показателей робота, в частности приемистости по скорости. Сущность изобретения состоит в том, что оно снабжено блоком проверки окончания цикла, блоком вычисления производных, блоком вычисления шага и решающим блоком, при этом выходы блока считывания программы и датчиков положения соединены с блоком вычисления производных, выход блока вычисления производных соединен с блоком вычисления шага, выход блока вычисления шага соединен с решающим блоком, а решающий блок соединен с блоком проверки окончания цикла, имеющий выходы "да" и "нет", причем выход "да" соединен с блоком управления приводами, а выход "нет" соединен с блоком вычисления производных. Применение изобретения позволяет упростить устройство управления при сохранении точности воспроизведения заданных траекторий. Особенностью устройства управления промышленным роботом является его способность управлять роботом практически с любой кинематической схемой. 1 ил.
Устройство для управления промышленным роботом, содержащее блок памяти, блок считывания программы, блок управления приводами, приводы, исполнительный механизм промышленного робота и датчики положения, причем блок памяти соединен с блоком считывания программы, отличающееся тем, что оно снабжено блоком проверки окончания цикла, блоком вычисления производных, блоком вычисления шага и решающим блоком, при этом выходы блока считывания программы и датчиков положения соединены с блоком вычисления производных, выход блока вычисления производных соединен с блоком вычисления шага, выход блока вычисления шага соединен с решающим блоком, а решающий блок соединен с блоком проверки окончания цикла, имеющий выходы "да" и "нет", причем выход "да" соединен с блоком управления приводами, а выход "нет" соединен с блоком вычисления производных.
| Устройство для управления промышленным роботом | 1976 |
|
SU619331A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1999 |
|
RU2146999C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2054349C1 |
| DE 3723329 А1, 21.01.1988 | |||
| Сырьевая смесь для получения искусственного камня | 2017 |
|
RU2646119C1 |

