(54) УСТРОЙСТВО ДЛЯ ЗАПИСИ ПРОГРАММЫ УПРАВЛЕНИЯ
lПPO ьшлЁнным РОБОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ввода программы упра-ВлЕНия пРОМышлЕННыМ РОбОТОМ | 1979 |
|
SU830315A1 |
| Система программного управления для робота-манипулятора | 1978 |
|
SU744456A1 |
| Устройство для записи программы управления промышленным роботом | 1977 |
|
SU726494A1 |
| Устройство для записи программы контурного управления промышленным роботом | 1978 |
|
SU930255A1 |
| Устройство для записи программыупРАВлЕНия пРОМышлЕННыМ РОбОТОМ | 1978 |
|
SU807216A1 |
| Устройство для управления промышленным роботом | 1981 |
|
SU970320A1 |
| Устройство для записи программы управления промышленным роботом | 1976 |
|
SU699492A1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1495114A1 |
| Устройство для программирования промышленного робота | 1985 |
|
SU1277068A1 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
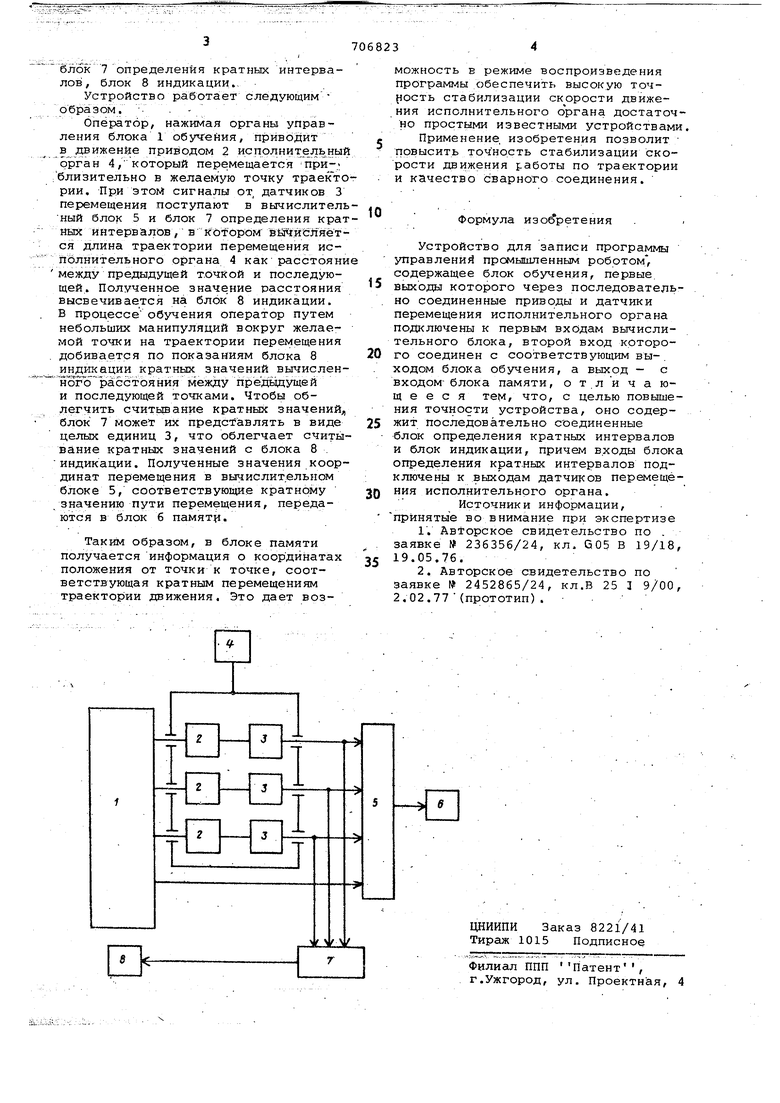
Изобретение относится к области программного управления многокоординатными устройствами и может быть использовано при записи программы управления .положением исполнительн органа прс 1ышленного робота, например, при.дуговой сварке. Известны устройства для записи программы управления.промышленным роботом. Устройство l , содержащее блок памяти, исполнительный орган, датчики перемещения, исполнительные приводы и сумматоры, не обеспечивает стабилизации скорости перемещени по траектории. Наиболее близким техническим решением к изобретению является устро ство 2 , содержащее блок обучения Первые выходы которого через последовательно соединенные приводы и датчики перемещения исполнительного органа подключены к первымвходам вычислительного блока, второй вход которого соединен с соответствующим выходом блока обучения, а выход - с входом блока памяти. В известном устройстве запись осуществляется с произвольно выбранным интервалом между точками. когда используется распространенный метод записи nporpaiviMH обучения от точки к точке. При этом произ-; вольно выбранные интервалы записываемой траектории в дальнейшем при воспроизведении программы должны интерполироваться .В большинстве случаев в режиме интерполяции должна быть выдержана заданная скорость дви жения. Если же робот выполнен не в прямоугольной системе координат, а всферической, цилиндрической, то обеспечить стабильность скорости при произвольных отрезках интерполяции крайне сложно. Цель изобретения - повышение точности устройства. Для этого оно содержит последовательно соединенные блок определения кратных интервалов и блок индикации, причем входы блока определения кратных интервалов подключены к выходам датчиков перемещения исполнительного Ьргана. На чертеже представлена функциональная схема устройства. Она содержит блок 1 обучения,приводы 2 исполнительного органа,датчики 3 перемодения исполнительного органа, исполнительный орган 4,вычислительный блок 5, блок б памяти
блок 7 определения кратных интервалов, блок 8 индикации..
Устройство работает следующимобразом. . Оператор, нажимая органы управления блока 1 обучейия, приводит в движение приводом 2 исполнительный орган 4, который перемещается .лизительно в желаемую точку траектории. При этом сигналы от датчиков 3 перемещения поступают в вычислительный блок 5 и блок 7 определения кратных интервалов, в Котором йдаисляётся длина траектории перемещения испблнительного органа 4 какрасстояние
между предыдущей точкой и последующей. Полученное значение расстояния высвечивается на блок 8 индикации. В процессе обучения оператор путем небольших манипуляций вокруг желаемой точки на траектории перемещения добивается по показаниям блока 8 индикации кратных значений вычисленного расстояния между предадувдей и последующей точками. Чтобы облегчить считьшание кратных значений;, блок 7 может их представлять в виде целых единиц 3, что облегчает считывание кратных значений с блока 8
индикации. Полученные значения координат перемещения в вычислительном блоке 5, соответствующие кратному значению пути перемещения, передаются в блок б памяг.
Таким образом, в блоке памяти получается информация о коордйнатах положения от точки к точке, соответствующая кратным перемещениям траектории движения. Это дает возможность в режиме воспроизведения программы /обеспечить высокую точfiocTb стабилизации ск орости движения исполнительного органа достаточно простыми известными устройствами.
Применение, изобретения позволит повысить точность стабилизации скорости движения работы по траектории и качество сварного соединения.
Формула изой ретения
Устройство для записи программы управлений промышленным роботом, содержащее блок обучения, первые выходы которого через последовательно соединенные приводы и датчики перемещения исполнительного органа подключены к первым входам вычислительного блока, второй вход которого соединен с соответствующим вы-, ходом блока обучения, а выход - с входом-блока памяти, отличающееся тем, что, с целью повышения точности устройства, оно содержит последовательно соединенные блок определения кратных интервалов и блок индикации, причем входы блока определения крат.ных интервалов подключены к выходам датчиков перемещения исполнительного органа.
Источники информации, принятые во внимание при экспертизе
