Изобретение огносигся к измерительной технике и может быть использовано при выборе этапонной попатки.
В основном авт. св. № 56О149 описано устройство дпя сортировки эталонных лопаток по центру их тяжести с использованием имитатора содержащее коромысло в виде горизонтальной рамы, узеп крепления эталонной лопатки с держателем, подвеску, установленный на ней груз н отсчеч ные приспособления, закрепленные на коромысле. В горизонтальной раме в одной с ней плоскости расположена внутренняя рама, установленная с возможностью перемещения в этой плоскости в направлении осн X, а держатель узпа крепления этапонной попатки закреплен неподвижно на внутренней раме и выполнен с возможностью перемещения узла в двух взаимно перпенднкуп$фных направлениях ( по осям У н Z ) и поворота вокруг Оси X,
Однако известное устройство решает узкую задачу - выбор эталонной лопатки путем сравнения ее геометрических napa-i метров с параметрами имитатора, что не
обеспечивает возможности имитации любой расчетной лопагли с расчетными положениями центра тяжести в трех плоскостях и ограничивает область действия эта-
лонной попатки как имитатора лопаток с различными массами и положениями ценгра тяжести.
Цель изобретения - возможность имитации любой расчетное лопатки.
Дчя этого предлагаемое устройство снабжено регуляторами координат центра тяжести имитатора и сменными хвостовиками, закрепленными на последнем.
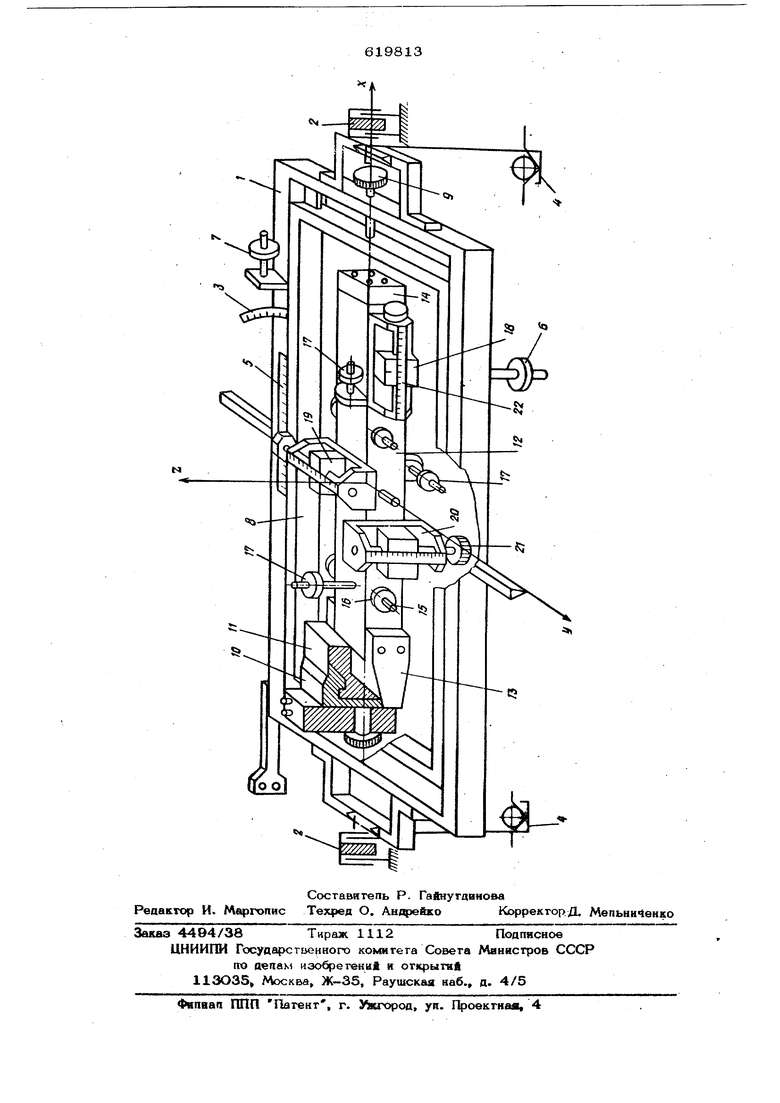
На чертеже изображено устройство для
сортировки эталонных попаток, содержащее коромысло 1, снабженное компенсаторами 2 и шкалой 3, подвесками 4, отсчетной лнней1сой 5, регуляторами 6 и 7 коромыспа. Внутр | коромысла расположена рама
В, перемещаемая микрометрической подачей 9. На раме 8 имеется держатель 1О с сменными вставками 11. Имитатор расчетной- попатки содержит стержень 12, выполненный составным. Спе
ва к нему крепится сменный хвостовик
13, а справа - удпинигепь 14, который можег быть выполнен также и раздвижным На стержне 12 имеется ряд цилиндрических папьцев 15 для насаживаемых на них дисков 16, имитирующих расчетную массу попатки. Имитатор сна&кен гайка- ми 17 по всех трех взаимноперпендикул я1шых плоскостах и регуляторами коорд -центра тяжести имитатора по осям X, У HZ .
Эти регуляторы выполнены в виде поп аунов 18, 19 и 2О известной массы, перемещаемых вдоль соотвегствукнцих осей. Каждый ползун снабжён микрометрическим винтом с сщи ванным лимбом 21 и отсчетноД пйнейкой 22.
Юстировка HivffiTaTopa производится спедующим образом. Хвосговик 13 крепят к стержню 12. Затем (при необходимости) yiepenngaoT соответствующую ( регулирующую) насадку удлинителя 14. Подгоняют имятатор пов. требуемую массу, для чего его помешают на весы и добавляют диски 16 на папьцы 15 до достижения заданной массы;.
Затем устанавливают ползуны коордиват X, У, 7 & среднее положение к закрепляют нкштатор 0 замок сменной вставки 11 и устанавливают на коромысле, перед вигая раму 8 в рабочее положение по ли нейке 5..
Ура овешиваюг коромысло 1 по коор« дина X с помощью гирь на подвесках 4, затем постепенно заменяют их путем перемещения ползуна 18 и гаек 17. Подгонку У и 2 производят соответственно с помощью ползунов 19 и 2О и гаек 17 при двух, развернутых относительно друг (фуга на угол 11/2, положениях имитато }а относительно продольной оси X
Зафиксировав найденные полшкенин
ползунов, риняв их за исходные и зная массу ползунов, их последовательно перемешают по ходовым вингам на расчетные величины в требуемых направлениях. Величины перемещений определяются из уравнения: дР .Р
и ч
где Е - требуемое и кьнтролируемое по пимбу 21 и линейке 22 смещение ползуна;
дЕ --расчетное смещение центра тяжесги лопатки от базовых плоскостей;
Р - масса расчетной лопатки ( т.е. ранее подогнанная на весах масса имита тора);
( - масса ползуна регулятора данно координаты ( ранее измерена на весах).
Устройство для сортировки эталонных; лопаток позволяет создать имитаторы лопаток с заданными координатами положения центра тяжести, которые необходимь для юстировки и проверки приборов, измеряющих координаты центра тяжести лопаток.
Устройство с имитатором позволяет реально имитировать рассчитанную конструктором лопатку ( дпя последующего подбора эталонной лопатки) с совершенно однозначно установленными координатами ее центра тяжести относительно базовых плоскостей во всех трех взаимно-..перпендикулярных направлениях,
Формула изобретения
Устройство для сортировки эталонных лопаток по центру их тяжести с использованием имитатора по авт.св.№ 56О149, отличающееся тем, что, с целью обеспечения возможности имитации любой расчетной лопатки, оно снабжено регуляторами координат цен фа тяжести имитатора и сменными хвостовиками, зак. реппенныкш на поспеднем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки эталонных лопаток | 1974 |
|
SU560149A1 |
| Устройство для измерения изделий сложной формы | 1990 |
|
SU1758405A1 |
| Устройство для определения моментного веса лопаток турбин | 1983 |
|
SU1143985A1 |
| Устройство для определения координат центра тяжести лопаток | 1980 |
|
SU912653A1 |
| Устройство для определения статического момента изделий | 1979 |
|
SU894377A1 |
| Устройство для измерения статического момента массы лопаток турбомашин | 1988 |
|
SU1608445A1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОСИГНАЛА, ОТРАЖЕННОГО ОТ ВОЗДУШНОЙ ЦЕЛИ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ, В УСЛОВИЯХ ПАССИВНЫХ И АКТИВНЫХ ПОМЕХ | 2023 |
|
RU2826626C1 |
| Устройство для определения координат центра масс изделия | 1982 |
|
SU1021962A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ СТАТИЧЕСКОГО МОМЕНТА ЛОПАТКИ ТУРБОМАШИНЫ | 1973 |
|
SU384034A1 |
| Устройство для уравновешивания лопаток роторных изделий | 1975 |
|
SU584216A1 |