ления гиреналожением выполнена в виде блока 30 сравнения, ключей 31-34, масштабного блока, шифратора 37, дешифратора 38 и датчиков 39 положения гирь 14. Блок 30 сравнения в соответствии с выходным сигналом усилителя 25 системы измерения автоматически включает через ключи 31-33
соответствующие электромагниты 18 фикса- тэров 17 гирь 14 механизма 15 гиреналожения i-i электродвигатель 21, обеспечивая тем самым i втоматическое уравновешивание гирями 14 части статического момента массы измеряемой лопатки, полное значение которого с -ядты- зается с цифрового индикатора 27. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения статических моментов лопаток турбомашин | 1987 |
|
SU1420417A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1339406A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1318799A1 |
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
| Автоматическое весовое устройство | 1981 |
|
SU1064150A1 |
| Весоизмерительное устройство | 1980 |
|
SU870960A1 |
| Прецизионные большегрузные стационарные весы | 1978 |
|
SU748139A1 |
| Автоматические весы | 1987 |
|
SU1441204A1 |
| Устройство для определения веса | 1985 |
|
SU1281911A1 |
| Устройство для измерения статических моментов лопаток турбомашин | 1987 |
|
SU1456795A1 |
Изобретение относится к машиностроению и может использоваться для измерения статического момента массы лопаток турбомашин. Цель изобретения - повышение надежности и производительности за счет снабжения устройства системой управления гиреналожением, что автоматизирует процесс измерения и исключает ошибки оператора. Система управления гиреналожением выполнена в виде блока 30 сравнения, ключей 31, 32, 33 и 34, масштабного блока, шифратора 37, дешифратора 38 и датчиков 39 положения гирь 14. Блок 30 сравнения в соответствии с выходным сигналом усилителя 25 системы измерения автоматически включает через ключи 31, 32 и 33 соответствующие электромагниты 18 фиксаторов 17 гирь 14 механизма 15 гиреналожения и электродвигатель 21, обеспечивая тем самым автоматическое уравновешивание гирями 14 части статического момента массы измеряемой лопатки, полное значение которого считывается с цифрового индикатора 27. 1 ил.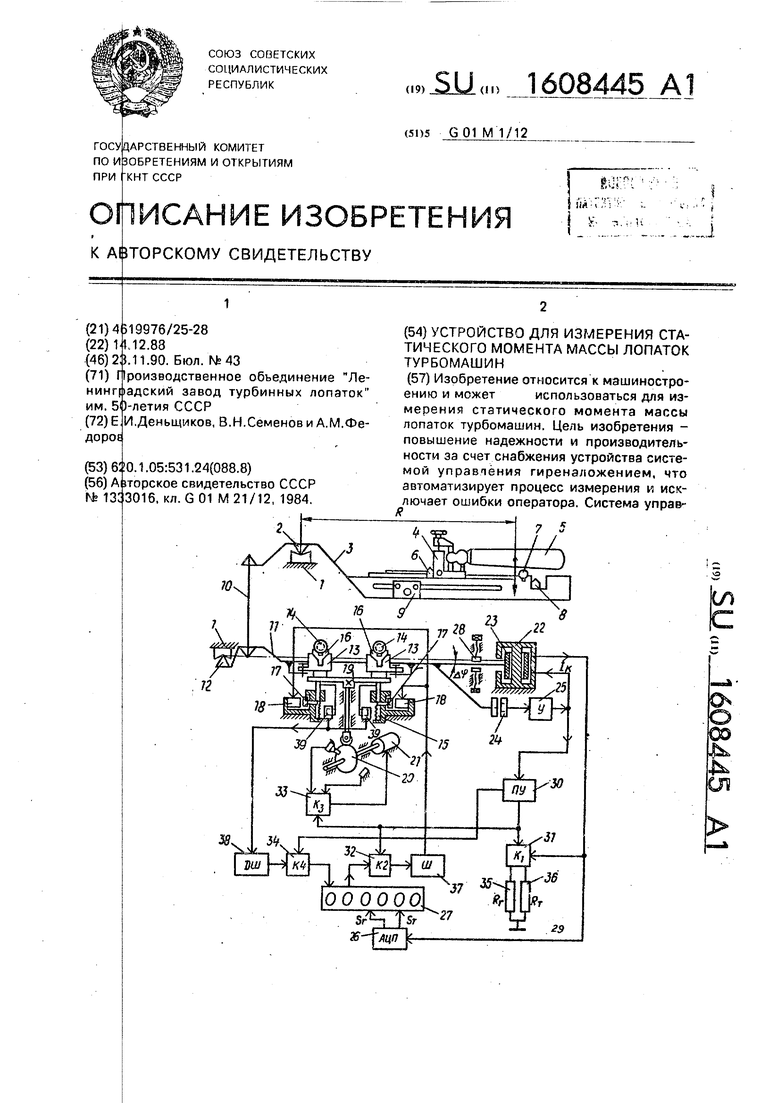
Изобретение относится к машиностроению и может использоваться для измерения статического момента массы лопаток турбомашин.
Цель изобретения - повышение надежности и производительности за счет снабжения устройства системой управления гиреналожением, что автоматизирует процесс измерения и исключает ошибки оператора,
На чертеже изображено устройство для измерения статического момента массы лопаток турбомашин.
Устройство для измерения статического момента массы лопаток турбомашин содержит основание 1, установленное на нем посредством .призматической опоры 2 коромысло 3 с переходником 4 для установки лопатки 5, снабженным призмой 6, на которую при юстировке устанавливается подвеска с контрольной гирей.
На коромысле 3 выполнен призматический паз для установки контрольного валика 7, предназначенного для проверки и настройки цены деления, закреплена призма 8, на которую устанавливается подвеска с контрольными гирями для создания эталонных моментов при поверке устройства, и установлен с возможностью перемещения вдоль коромысла 3 уравновешивающий груз 9,
Коромысло 3 серьгой 10 связано с рычагом 11, установленным посредством второй призматической опоры 12 на основании 1 и снабженным призматическими центрирующими элементами 13, предназначенными для установки уравновешивающих гирь 14 . с помощью механизма 15 гиреналожения.
В нерабочем положении гири 14 установлены на держателях 16, зафиксированных подпружиненными фиксаторами 1 /, с которыми взаимодействуют электромагниты 18,. закрепленные на оснований 1. Держатели 16 опираются на планку 19, ось которой взаимодействует с кулачком 20, закрепленным на оси электродвигателя 21, установленного на основании 1. Устройство содержит также систему измерения в виде электросилового преобразователя, включающего закрепленный на основании t постоянный магнит 22 и закрепленный на рычаге
11 соленоид 23, измерительный преобразователь 24 углового положения коромысла, усилитель 25, вход которого связан с выходом измерительного преобразователя 24, а
выход - с входом соленоида 23, и последовательно присоединенных к выходу усилителя 25 аналого-цифрового индикатора 27. Угол поворота рычага 11 ограничивается регулируемыми ограничителями 28,
0Для автоматизации процесса измерения устройство содержит также систему 29 управления гиреналожением в виде блока 30 сравнения, вход которого связан с выходом усилителя 25, ключей 31-34, масштаб5 ного блока, состоящего из резистора 35 грубого уравновешивания и резистора 36 точного уравновешивания коромысла 3, шифратора 37, выход которого связан с выходами электромагнитов 18 фиксации гирь,
0 дешифратора 38 и датчиков 39 положения гирь 14, Входы ключа 31 связаны с выхода- ми соленоида 23 и блока 30 сравнения, а его выход - с входом масштабного блока, входы ключа 32 связаны с выходами блока 30 срав5 нения и старших разрядов цифрового индикатора 27, а выход - с входом дешифратора 38, выходы ключа 33 связаны с входами электроприводов перемещения гирь, а вход - с выходом блока 30 сравнения, входы клю0 ча 34 связаны с. выходами дешифратора 38 и блока 30 сравнения, а выход - с входом старшего разряда цифрового индикатора
Устройство для измерения статического 5 момента массы лопаток турбомашин работает следующим образом,
В исходном положении гири 14 установлены на Держателях 16, коромысло 3 с рычагом 11 находится в равновесии, а на 0 индикаторе 27 - нулевые показания.
Осуществляют юстировку цены деления индикатора 27, для чего на коромысло 3 устанавливают контрольный валик 7 известной массы, и по значению создаваемого им 5 момента устанавливают показания индикатора 27. На коромысло 3 устанавливают переходник 4 с призмой 6 и уравновешивают его грузом 9. Контроль правильности уста- новки переходника 4 осуществляют уста- 50 новкой на призму 6 подвески с контрольной гирей, по величине создаваемого момента
расс1|итывают фактическое плечо установки переходника 4, при котором расчетное плечо лопатки 5 равно действительному плечу, Далее в переходник 4 устанавливают контролируемую лопатку 5, в результате че- го коромысло 3 и рычаг Нотклоняются от положения равновесия на некоторый угол, при г том на выходе измерительного преобразователя 24 появляется сигнал, гропор- циональный углу отклонения рычага 11, поступающий в усилитель 25. Усилитель 25 дыра5атывает компенсационный тек, поступающий в соленоид 23, магнитное поле которого, взаимодействуя с полем постоянного магнита 22, создает усилие, компенсирующее отклонение рычага 11. Анал зго-цифровой преобразователь 26 пре- обраювывает аналоговое значение компен- сац онного тока в цифровое, регистрируемое индикатором 27.
Если измеряемый статический момент мень ие предела точного уравновешивания, выходной сигнал усилителя 25 не превы-
заданного порогового значения и ком- пенс ционный ток проходит через ключ 31 зистор 36 точного уравновешивания. iTOM с аналого-цифрового преобразо- 26 снимается на цифровой индика- сигнал, эквивалентный измеряемому статическому моменту, значение которого регистрируется младшими разрядами цифровою индикатора 27.
измеряемом статическом моменте предела точного уравновешивания л с усилителя 25 превышает заданное овое значение блока 30 сравнения, ко- выдает сигналы на ключи 31-33. При ключ 31 отключает от соленоида 23 резистор 36 точного уравновешивания и подключает резистор 35 грубого уравновешивания. С аналого-цифрового преобразо- 26 поступает сигнал, эквивалентный и оценке измеряемого статического момента на цифровой индикатор 27. Значе- измеряемого статического момента ре- тся старшими разрядами цифр)эвого индикатора 27. Одновременно
32 подключает старшие разряды циф- индикатора 27 к шифратору 37, кото- ,есятичный код старших разрядов переводит в двоичный код и адресует сигна- с оответствующим электромагнитам 18,
торы 17 гирь 14 которых обеспечива- наложение гирь 14 на центрирующие элементы 13 рычага 11, суммарный уравновешивающий момент которых равен значе- статического момента старших разр5|дов цифрового индикатора 27 при гру- равновешивании, ключ 33 включает
то
шает
пенс;
и ре.
При
вате/1я
тор 217
Г ри болыЬе сигнг поро этом
вателя грубс
нйе
ключ
pOBOflO
рый
лы к
фикс
ют
нию pa3f бом
электродвигатель 21 механизма 15 гирена- ложения, который поворачивает кулачок 20.
При перемещении планки 19 вниз гире- держатели 16, фиксаторы 17 которых смещены соответствующими электромагнитами 18, перемещаются вниз и соответствующие гири 14, масса которых уравновешивает значение измеряемого момента, равного значениям старших разрядов цифрового индикатора 27, накладываются на центрирующие элементы 13 рычага 11: так как часть измеряемого статического момента уравновешивается гирями 14 (количество которых определяется диапазоном измерений статических моментов на данном устройстве), сигнал усилителя 25 становится меньше порогового значения блока 30 сравнения, на первом выходе которого сигнал становится равным нулю. Это вызывает переключение схемы уравновешивания ключом 31 в режим точного уравновешивания, отключение шифратора 37 ключом 32 от старших разрядов индикатора 27 и отключение электродвигателя 21 ключом 33. При этом с второго выхода блока 30 сравнения поступает сигнал на ключ 34, который подключает дешифратор 38, входы которого связаны с датчиками 39 положения гирь 14. к старшим разрядам индикатора 27.
Дешифратор 38 переводит код действительного положения уравновешивающих гирь 14 по сигналам с датчиков 39 положения гирь 14 в десятичный код, передаваемый на старшие разряды индикатора 27, на младшие разряды которого поступает код, являющийся цифровым отображением величины тока, компенсирующего разность стагических моментов измеряемой лопатки 5 и гирь 14.
Значение измеряемого статического момента считывается с цифрового индикатора 27, со старших разрядов - значение статического момента, уравновешенного гирями 14,- наложенными на центрирующие элементы 13 рычага 11, с младших - сигнал с аналого-цифрового преобразователя 26, равный остаточному статическому моменту, неуравновешенному гирями 14. При снятии измеряемой лопатки 5 с переходника 4 сигнал с усилителя 25 превышает значение порогового сигнала, так как гири 14 не сняты с центрирующих элементов 13 рычага 11, и блок 30 сравнения вырабатывает сигнал, выключающий ключи 3-1-33. При этом ключ 33 включает электродвигатель 21 механизма 15 гиреналожения, поднимающий гире- держатели 16 с гирями 14 с центрирующих элементов 13 рычага 11, после чего система коромысла 3 с рычагом 11 приходит в равновесие и сигнал с усилителя 25 становится
меньше порогового значения, при котором ключи 31-33 отключены, а ключ 34 включен, но, поскольку сигналы датчиков 39 положения гирь 14 отсутствуют, так как все гири 14 сняты с рычага 11, на старших разрядах индикатора 27 будут нули, на младших - нули, подключается система точного урав- новешивания и устройство готово к следующему измерению статических моментов.
Формула изобретения
Устройство для измерения статического момента массы лопаток турбомашин, содержащее основание, размещенное на нем посредством призматической опоры коромысло с переходником для измеряемой лопатки, систему измерения в виде электросилового преобразователя , включающего постоянный магнит и соленоид, измерительного преобразователя углового положения коромысла, усилителя, вход которого связан с выходом измерительного преобразователя, а выход - с входом соленоида, и последовательно присоединенных к выходу усилителя аналого-цифрового преобразователя и цифрового индикатора, и механизм гиреналожения, включающий электропривод перемещения гирь и электромагниты их фиксации, отличающееся тем, что, с
целью повышения надежности и производительности, оно снабжено системой управ- ления гиреналожением в виде блока сравнения, вход которого связан с выходом усилителя , шифратора , выход которого связан с входами электромагнитов фиксации гирь, дешифратора масштабного блока и датчиков положения гирь, выходы которых связаны с входом дешифратора, первого ключа, входы которого связаны с выходами
соленоида и блока сравнения, а выход - с входом масштабного блока, второго ключа, входы которого связаны с выходами блока сравнения и старших разрядов цифрового индикатора, а выход - с входом дешифратора, третьего ключа, выходы которого связаны с входами электроприводов перемещения гирь, а вход-с выходом блока сравнения, и четвертого ключа, входы которого связаны с выходами дешифратора и
блока сравнения, а выход - с входом старшего разряда цифрового индикатора.
| AisTopcKoe свидетельство СССР Г 1333016 | |||
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ю от 000000 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
