при скачкообразном изменении давления питания.
Эта цель достигается тем, что силовой регулятор снабжен толкателем и упругим демпфером, установленным последовательно между диафрагмой одной из диафрагменных камер и исполнительным элементом регулятора.
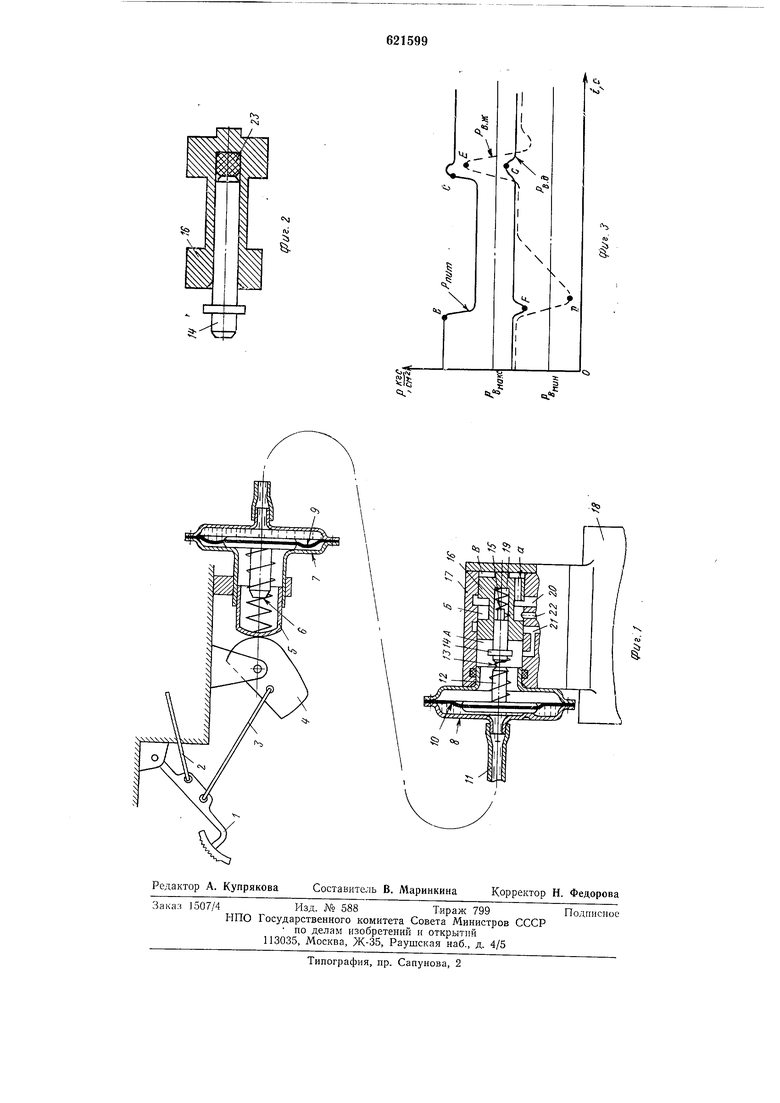
На фиг. 1 схематично изображен предлагаемый силовой регулятор с дистанционным приводом; на фиг. 2 - демпфер, выполненный в виде фигурной вставки; на фиг. 3 - график изменения выходного давления регулятора при скачкообразном изменении давления питапия.
Педаль 1 подачи топлива соединена тягой 2 с двигателем транспортного средства (не показан), а тягой 3 - с органом управления регулятора, выполпепным в виде кулачка 4, связанного через стакан 5 с задающей выходное давление регулятора пружиной 6.
Камеры 7 и 8, заполненные жидкостью и снабженные соответственно подвижными диафрагмами 9 и 10, соединены меладу собой трубопроводом 11. Диафрагма 9 связана с задающей выходное давление пружиной 6, а диафрагма 10 через шток 12, пружину 13, толкатель 14 и упругий демпфер, выполненный в виде пружины 15, - с исполнительным элементом регулятора, выполненным в виде золотника 16, установленного в цилиндрической полости корпуса 17 автоматической трансмиссии 18. Установочное усилие пружины 13 больще наименьшего рабочего усилия 6. Толкатель 14 и пружина 15 помещены в цилиндрической полости 19 золотника 16. Пружина 15 имеет осевую жесткость, большую максимального осевого усилия на золотнике 16, деленного на максимально допустимый рабочий ход диафрагм 9 и 10 и штока 12. Золотник 16 имеет два рабочих пояска, разделяющих цилиндрическую полость корпуса 17 на полости А, Б. В, которые соединены с гидросистемой трансмиссии 18 каналами: нагнетательным 20, сливным 21 и выходным 22. Полости Б и В сообщаются между собой посредством дроссельного отверстия а в правом пояске золотника 16.
Демпфер может быть выполнен и в виде фигурной вставки 23 из упругого материала, например резины (см. фиг. 2).
При неработающем двигателе и отпущенной педали 1 под действием пружины 13 диафрагмы 9 и 10 занимают крайнее левое полол ение, а золотник 16 вместе с толкателем 14 и пружиной 15 - крайнее правое (см. фиг. 1). В этом положении щток 12 не касается толкателя 14, т. е. привод отключен.
Работа на холостом ходу и при малой нагрузке двигателя осуществляется следующим образом.
Из гидросистемы трансмиссии жидкость под давлением поступает через канал 20 в полость Б и через отверстие а - в полость В. Золотник 16, сжимая пружины 13 и 15, переместится в рабочее положение (влево). При этом приоткроются каналы 21 и 20. В полостях Б и В установится минимальное выходное давление, уравновешивающее усилие пружины 13, которое по каналу 22 подается к механизму автоматического управления (не показан). На данном режиме выходное давление задается только пружиной 13. Пружина 15 сжимается до усилия, равного усилию пружины 13.
При большой нагрузке двигатель работает следующим образом.
Нал атием на педаль 1 через тягу 3 поворачивают кулачок 4. Выходное давление при этом остается постоянным до тех пор,
пока под действием кулачка 4 усилие пружины 6 не превысит усилие пружины 13. После этого под действием пружины 6 диафрагма 9, перемещаясь, вытеснит часть жидкости из камеры 7 в камеру 8 и переместит диафрагму 10 и щток 12 до упора в толкатель 14. 13 отключенной, и выходное давление будет задаваться только 6. При дальнейшем увеличении усилия пружины 6 шток 12 через толкатель 14 и пружину 15 переместит золотник 16 вправо, и выходное давление в полостях Б и В возрастет до величины, уравновешивающей усилие 6. При отпускании педали 1 детали привода и золотник перемещаются в обратном порядке, и выходное давление уменьшается.
Работа при поврежденном приводе осуществляется следующим образом.
В случае вытекания жидкости из камер 7
и 8 вследствие повреждения 6 и 13 переместят диафрагмы 9 и 10 до упора в крыщки камер и отключат привод. Однако 13 обеспечит работу регулятора на режиме минимального выходного
давления.
Для сохранения постоянного выходного давления при изменении давления питания в канале 20 золотник 16 переместится и займет равновесное нолол ение, соответствующее новому значению давления питания. Вместе с золотником переместятся все детали привода, расположенные между ним и задающей 6. Если же при больщой нагрузке двигателя изменение давления питания произойдет скачком (например, за 0,01 с.), то силы инерции затормозят движение деталей привода и жидкости в трубопроводе 11. Шток 12, двигаясь во много раз медленнее золотника, во время
изменения давления останется практически неподвижным, играя роль жесткого упора. В этом случае перемещение золотника 16 нроизойдет только за счет сжатия или распря.мления пружины 15. Пружина 15 па
данном режиме служит демпфером, уменьшающим колебание выходного давления. При ее отсутствии золотник, упираясь в шток 12, остался бы неподвижным, вследствие чего выходное давление изменилось бы скачком, новторяющим скачок давления в канале 20. Демпфирующий эффект пружины 15 поясняется графиком на фиг. 3. Скачкообразное изменение давления питания /пит соответствует типичному процессу переключения ступеней в гидромеханической трансмиссии. Точки В и С обозначают начало и конец переключения. Пунктирная кривая РВ.Ж показывает изменение выходного данления при жестком дистанционном приводе 15 (без демпфера), а сплошная кривая РВ.Д- при наличии демпфера. Как видно из графика, в первом случае при скачкообразном падении давления питания имеет место провал выходного давления почти до нуля 20 (точка )), при скачкообразном повышении - заброс почти до РПИТ (точка Е). Величина выходного давления может превыщать рабочие пределы Рмакс - РМПИ, что недопустимо. При наличии демпфера экстре- 25 мальные значения выходного давления уменьщаются (точки F т G), а сама кривая сглаживается. Сглаживающее действие демпфера тем больше, чем меньше его жесткость . Однако 30 применение демпфера увеличивает рабочий ход привода на величину деформации, также зависящую от жесткости. Поэтому, чтобы увеличением рабочего хода не ухудшить 5 10 быстродействие привода, достигнутое в основном изобретении, жесткость демпфера нужно увеличивать. Минимально допустимая жесткость демпфера должна быть такой, чтобы при сжатии усилием, равным максимальному усилию привода, деформация его была не более максимально допустимого рабочего хода привода. Например, максимальное усилие пружины 6 равно 6 кг, допустимый рабочий ход привода 2,5 мм, а жесткость пружины 15-3 кг/мм. Однако эта жесткость достаточна для демпфирования, так как для гашепия забросов давления золотпику достаточно перемещения, измеряемого долями миллиметра, и соответствующая деформация демпфера не вызовет сушественного приращения выходного давления. Больщая допускаемая жесткость демпфера позволяет выполнить его не только в виде пружины, но, например, в виде вставки 23 из упругого материала (резины, пластмассы и т. д.). Формула изобретения Силовой регулятор с дистанционным приводом для автоматической трансмиссии по авт. св. № 515672, отличающийся тем, что, с целью уменьшения колебаний выходкого давления, он снабжен толкателем и упругим демпфером, установленным последовательно между диафрагмой одной из диафрагмепных камер и исполнительным элементом регулятора.
N
го
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор давления системы автоматического управления трансмиссией транспортного средства | 1978 |
|
SU766915A1 |
| Силовой регулятор с дистанционным приводом для автоматической трансмиссии | 1973 |
|
SU515672A1 |
| Силовой регулятор с дистанционным приводом для автоматических трансмиссий транспортных средств | 1977 |
|
SU695860A1 |
| Золотниковый клапан | 1980 |
|
SU956855A1 |
| Устройство для автоматическогоупРАВлЕНия дВигАТЕлЕМ и бЕССТупЕН-чАТОй ТРАНСМиССиЕй ТРАНСпОРТНОгОСРЕдСТВА | 1976 |
|
SU802098A1 |
| Силовой регулятор с дистанционным приводом для автоматической трансмиссии | 1987 |
|
SU1491748A1 |
| Гидромеханическая трансмиссия транспортного средства | 1976 |
|
SU653148A1 |
| Система автоматического управления трансмиссией транспортного средства | 1966 |
|
SU887286A1 |
| Двигатель внутреннего сгорания | 1981 |
|
SU954591A1 |
| Механизм управления топливоподачей двигателя привода водяного насоса пожарного автомобиля | 1989 |
|
SU1673741A1 |