ной, а изменяют скорость в фазе опоры. Кроме того, для автоматического поддержания заданных параметров движения конечностей при изменении типа походки измеряют рассогласование текущих значений угловых положений шарниров бедра конечностей и изменяют на текущем шаге скорость каждой конечности в фазе переноса на величину, пропорциональную измеренному рассогласованию меледу текуш,им и заданным положениями.
На фиг. 1 изображены четыре возможные траектории волны возбуждения; на фиг. 2 - диаграммы трех типов походки; на фиг. 3 - диаграмма перехода от походки «галоп к походке «трешками.
Рассмотрим осуществление способа координации движения конечностей на примере шестиногого аппарата, имеющего симметричное относительно продольной оси расположение конечностей: конечности 1-3 левой стороны аппарата и конечности 4-6 правой стороны.
Каждая конечность имеет, например, три степени свободы и состоит из двух шарниров; двустепенного шарнира бедра и одностепенного шарнира голени. Причем, одна степень свободы шарнира бедра обеспечивает движение конечности вперед-назад, а другая степень вместе с шарниром головки обеспечивает движение конечности в плоскости, перпендикулярной к боковой поверхности аппарата.
Управление движением такого аннарата заключается в формировании двух программ: программы управления движениями каждой конечности и программы межконечностной координации. Причем, первая программа обеспечивает независимое движение каждой конечности в фазах опоры и переноса при заданных значениях длины шага и угловых положений шарниров, а вторая - формирование заданных фазовых сдвигов между движениями отдельиых конечностей.
Различные значения фазовых сдвигов определяют различные типы походок, т. е. различное число конечностей аппарата в каждый момент времени в фазе опоры.
Так при «поочередной походке в каждый момент времени на поверхности находятся пять конечностей, а в фазу переноса поочередно переводят по одной конечности. При походке «галоп на оноре находятся четыре конечности, а в фазе нереноса две, а при походке «трешками в фазах опоры и переноса - по три конечности в каждой.
Для обеспечения перестройки походок в процессе движения аппарата формируют волну возбуждения, заключающуюся в поочередном переводе каждой последующей конечности при достижении предыдущей опоры либо заданного значения углового положения в первом шарнире. Возможные траектории I-IV волны, показанные пунктиром-стрелками, приведены на фиг. 1.
Используем траекторию I. На диаграмме (см. фиг. 2) графически изображены три типа походки. Фаза переноса выделена жирной чертой, а фаза опоры - тонкой. Из диаграмм видно, что для перехода от походки «поочередной к походке «трещки необходимо длительность /„ер фазы переноса оставить постоянной, а уменьшить длительность ion фазы опоры. Но так как длина шага
постоянна и одинакова для всех конечностей, то уменьшение времени фазы опоры соответствует возрастанию скорости движения в этой фазе. Следовательно, для изменения тина походки аппарата необходимо
при постоянных значениях длины h шага и скорости /п фазы переноса изменить величину Vo скорости фазы оноры.
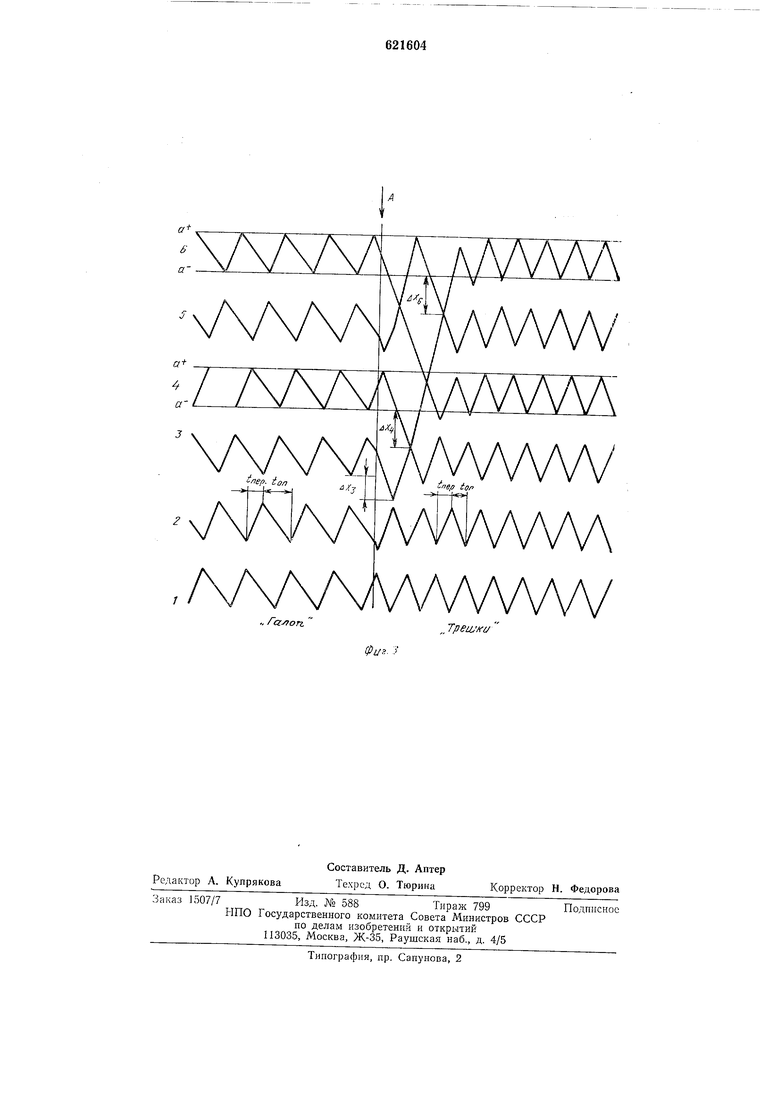
Рассмотрим осуществление способа координации на примере перехода от походки
«галоп к походке «трешки по диаграмме, приведенной на фиг. 3, где а+, а- - задаваемые значения положений шарииров бедра в щнце фазы переноса и фазы опоры соответственно.
Пусть аппарат движется со скоростями УП и Vo, соответствующими походке «галоп. Для перестроения ноходки изменяют величину скорости фазы опоры всех конечностей до значения, соответствующего походке «трешками (момент А на фиг. 3). Рассмотрим движение конечности 3. К моменту А конечность 3 находилась в фазе опоры, в которой и продолжает двигаться дальше, но с другой скоростью. В это время
конечность 2, достигшую значения а, переводят в фазу переноса, и она продолжает движение в этой фазе до достижения значения а+. Все это время третья конечность движется в фазе опоры. В момент перевода
конечности 2 в фазу опоры сигнал возбуждения подают на конечность 3 и производят измерение текущего положения первого шарнира конечности 3. В данном случае шарнир сместится дальше задаваемого полол ения а на величину Ахз (а другие конечности на Ах, Ах2, Axi, Ах, Ах), и движение в фазе нереноса этой конечности начнется из текущего положения. Скорость конечности 3 увеличивают в соответствии с
уравнением:
Т/ - 1/ Л +
где 1/пз -скорректированное значение скорости переноса,
/I а+ + а. Дальнейщее движение при отсутствии рассогласований конечность б)дет совершать с первоначальным значением скорости фазы переноса. Аналогичные
действия производят и для остальных конечностей. После переходного режима конечности буд}т двигаться в режиме походки «трешками. Изобретение обеспечивает перестроение
типа походки в процессе двилсения аппарата только лишь одним параметром - скоростью фазы опоры, и поддержание заданных кинематических параметров на автоматическом уровне. Способ может быть применен для шагающих аппаратов с автономными системами управления, когда роль оператора сводится к заданию обобш,енных параметров движения, что позволяет значительно упростить управление и повысить надежность системы в целом.
Формула изобретения
1. Способ координации движения конечностей шагаюшего аппарата путем независимого регулирования скорости каждой из симметрично расположенных вдоль аппарата конечностей в фазах переноса и опоры
при постоянстве длины шага и значений угловых перемещений шарниров бедра и голени, отличающийся тем, что, с целью изменения типа походки в процессе движения аппарата, скорость конечностей в фазе переноса задают постоянной, а изменяют скорость в фазе опоры.
2. Способ по п. 1, отличающийся тем, что, с целью автоматического поддержания заданных параметров движения конечностей при изменении тина походки, измеряют рассогласование текущих значений угловых положений шарниров бедра конечностей и на текущем шаге изменяют скорость каждой конечности в фазе переноса на величину, пропорциональную измеренному рассогласованию.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления движениями конечностей шагающего аппарата | 1976 |
|
SU644479A1 |
| Устройство управления движением шагающего аппарата | 1977 |
|
SU736975A1 |
| Устройство координации движений конечностей экзоскелетона | 1978 |
|
SU759099A1 |
| СПОСОБ ЛЕЧЕНИЯ ДЕТСКОГО ЦЕРЕБРАЛЬНОГО ПАРАЛИЧА В ФОРМЕ СПАСТИЧЕСКОЙ ДИПЛЕГИИ В ПОЗДНЕЙ РЕЗИДУАЛЬНОЙ СТАДИИ | 2013 |
|
RU2547086C1 |
| СПОСОБ ОЦЕНКИ ВЛИЯНИЯ ВПИТЫВАЮЩЕГО ИЗДЕЛИЯ НА ПОХОДКУ | 2021 |
|
RU2817318C1 |
| НОГА ШАГАЮЩЕГО АППАРАТА | 2014 |
|
RU2594316C2 |
| Способ использования виртуальной цифровой модели ходьбы пациента для дифференцированного построения индивидуальной программы физической реабилитации в раннем восстановительном периоде ишемического инсульта в зависимости от бассейна поражения | 2020 |
|
RU2741860C1 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ ИСКУССТВЕННЫМ КОЛЕННЫМ СУСТАВОМ | 2020 |
|
RU2814943C2 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| СПОСОБ КОРРЕКЦИИ ДВИЖЕНИЙ ПРИ ХОДЬБЕ В РАЗНОМ ТЕМПЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2082452C1 |
С
1л Al
insp t on
ЛА АЛ
Л( И t/C.t t IA
N -Al
ж
Mf
ion
fnep ton
2
..
„ TpeiL/fu
