1
Изобретение относится к области шагающих аппаратов, способных перемещать, в частности, больных, потерявших естественную возможность передвижения. Управление таким аппаратом осуществляется oneратором посредством минимального числа управляющих сигналов.
Известно устройство управления движениями конечностей шагаюпдего аппарата, содержащее пульт управления, блоки независимого управления движ;ением суставов конечностей, блоки синхронизации и коррекции, а также блокп датчиков углового перемещения суставов и рецепции опоры 1.
Однако известное устройство не обеспечивает как одновременное, так и независимое регулирование типа походки и скорости движения аппарата и не поддерживает заданных оператором кинематических параметров движения.
Целью настоящего нзобретения является одновременное и независимое регулирование типа походки и скорости движения аппарата, а также сохранение заданных кинематических параметров движения.
Указанная цель достигается тем, что устройство содержит блоки торможения и возбуждения, последовательно соединенные с блоками формирования последовательностей возбуждения и торможения, выходы
которых соединены со входами блоков независимого управления движениями суставов конечностей, прнчем входы блоков торможения н возбуждения соединены с блоком датчиков рецепции опоры, а блок коррекции дополнительно имеет блок памяти, соединенный с выходом блока датчиков реценции опоры, и блок вычисления скорости двнжения в фазе переноса конечности, связанной с блоками независимого управления двил еннями суставов конечностей и блоком памяти.
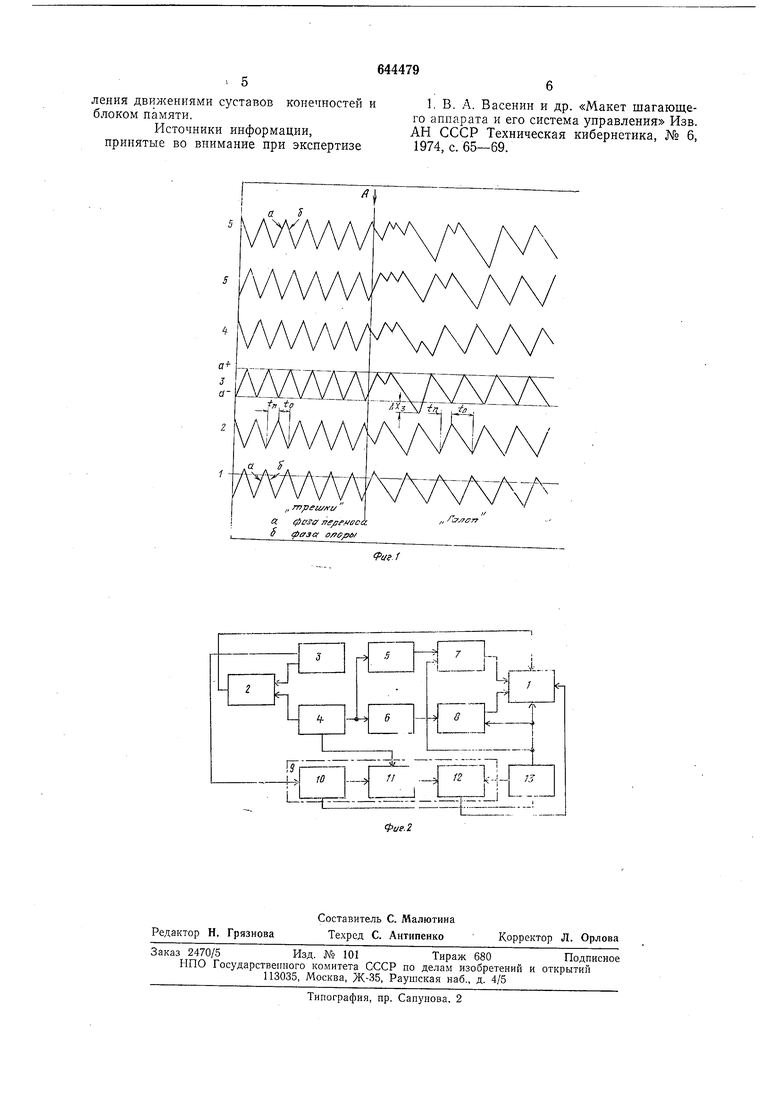
На фиг. I показана возможность перехода от походки «трешками до «галопа, например, для шестиногого аппарата; на фиг. 2 - блок-схема устройства зправления движениями конечностей шагающего аппарата.
Устройство содержит блоки 1 независимого управления суставайи конечностей, на входы которых поступают сигналы с блоков 2 синхронизации, на входы которых поступают, в свою очередь, сигналы с блоков 3, 4 датчиков углового положения суставов и рецепции опоры соответственно; блоки 5, 6 торможения и возбуждения, на входы которых поступают сигналы с блоков 4 датчиков рецепции опоры, а выходы соединены со входами блоков 7, 8 формирования последовательностей возбуждения и торможения, причем выходы блоков 7 и 8 соедпнены со входами блоков 1; блок 9 коррекции, состоящий из последовательно соединенных блоков 10 сравнения, блоков И памяти и блоков 12 вычисления скорости движения в фазе нереноса, выход которого соединен со входом блоков 1, нричем вторые входы блоков 10 и 12 соединены с выходом пульта 13 управления, соединенного также со входами блоков 1, 7 и 8.
Устройство работает следующим образом. По сигналу с пульта 13 управления формируются необходимые последовательности возбзждения и торможения на блоках 5, 6. Причем вид последовательностей зависит как от числа конечностей, так и от заданных типов ноходок. Например, для шестиногого аппарата с симметрично расположенными конечностями и основными походками типа: «поочередная, когда в каждый момент времени переносится одна конечность, а нять остальных движутся в фазе опоры, «галоп, когда переносятся одновременно две симметрично расположенных конечности, а остальные на опоре, и «трешка, когда переносятся три конечности,-можно выбрать последовательность возбуждения вида 1-2-3-4-5-6 и торможения 6-5-4-3-2-1, где 1,..6 - номера конечностей. Причем, номера конечностям могут быть нрисвоены, например, следующим образом: конечностям правой стороны - 1, 2, 3 в направлении движения аппарата и конечностям левой - 4, 5, 6. Далее на пульте 13 унравления выбирают значения точек переднего а+ и заднего а выносов конечностей и скорости фазы нереноса. Определяют необходимый тип походки и соответствующее ему значение скорости фазы опоры - УО.
Пусть в начальный момент времени параметры выбраны таким образом, что конечности движутся в режиме походки «трешками. Изменяют на пульте 13 скорость опоры (Уо) таким образом, чтобы она соответствовала новой скорости движения при походке «галоп (момент А на фиг. 1).
В этом случае конечность 1 продолжает двигаться в фазе переноса и, дойдя до точки а+, по сигналу с блока 3 датчиков углового положения или блока 4 датчиков рецепции опоры (при достижении поверхности) изменит свою фазу на нротивоноложную, т. е. на опору, одновременно нодавая сигнал на блок 6 возбуждения. С выхода данного блока сигнал через блок 7 форми- . рования последовательности возбуждения ноступает на блокн 1 независимого управления (т. е. на конечность 2), переводя ее в фазу переноса. Аналогичное взаимодействие производится и для конечностей 3-6. При этом, в момент временн t конечность 3 сместилась дальше точки а- на величину Алз. При этом текущее значение углового положення с блоков 3 постунает на вход блоков 10 сравнения, где сравнивается с программным значением, поступающим с iiyjifjTa 13. И если разность значений не равна нулю (как в данном случае), то она запоминается в блоках 11 и поступает на вход блоков 12 вычисления скорости движения в фазе переноса, где вычисляется необходимое значение скорости для поддержания заданной длины шага (увеличение крутизны на ветке а, фиг. 1). По окончании
фазы переноса сигнал с блока 4 обнуляет запомненное значение блока 11.
Одновременно сигнал с конечности 5 (с выхода блока 4) постунает на вход блока 5 торможения и через блок 8 поступает на
вход блоков 1 (на конечность 4), переводя ее в режим фазы опоры (ветвь б). Спустя два цикла, движения конечности переводят в режим походки «галоп с программными параметрами.
Проверка работоспособности данного устройства ноказала, что оно позволяет однопараметрически (изменением скорости фазы опоры - УО) осуществлять нлавное изменение тина походки, а путем изменения
скоростей фаз переноса и опоры, при постоянном соотношении между ними, изменять скорость движения аппарата при заданном типе походки. Причем, изменение типа походки производится при поддержаНИН заданных кинематических параметров движения. Указанные, отличия обеспечивают устройству простоту и эффективность управления со стороны онератора и позволяют рекомендовать для включения в систему
унравления шагаюш,им аппаратом.
Формула изобретения
1.Устройство унравления движениями конечностей шагающего аппарата, содержащее пульт унравления, блокн независимого управления движением суставов конечностей, блокн синхронизации и коррекции, а также блоки датчиков углового перемещеПИЯ суставов и рецепции опоры, отличающееся тем, что, с целью одновременного и независимого регулирования типа походки и скорости движения аппарата, оно содержит блоки торможения и возбуждения,
последовательно соединенные с блоками формирования последовательностей возбуждения и торможения, выходы которых соединены с входами блоков независимого унравления движениями суставов конечностей, нричем входы блоков торможения и возбуждения соединены с блоком датчиков реценции опоры.
2.Устройство но п. 1, отличающееся тем, что, с целью сохранения заданных кинематических параметров движения, блок коррекции дополнительно имеет блок памяти, соединенный с выходом блока датчиков рецепции оноры, и блок вычисления скорости движения в фазе нереноса конечности,
связанный с блоками независимого управления двил ениями суставов конечностей и блоком памяти.
Источники информации, принятые во внимание при экспертизе
„ трешли а .oc
S lfff3 X ff/7Ofluf
1. В. А. Васенин и др. «Макет шагающего аппарата и его система управления Изв. АН СССР Техническая кибернетика, № 6, 1974, с. 65-69.
f, 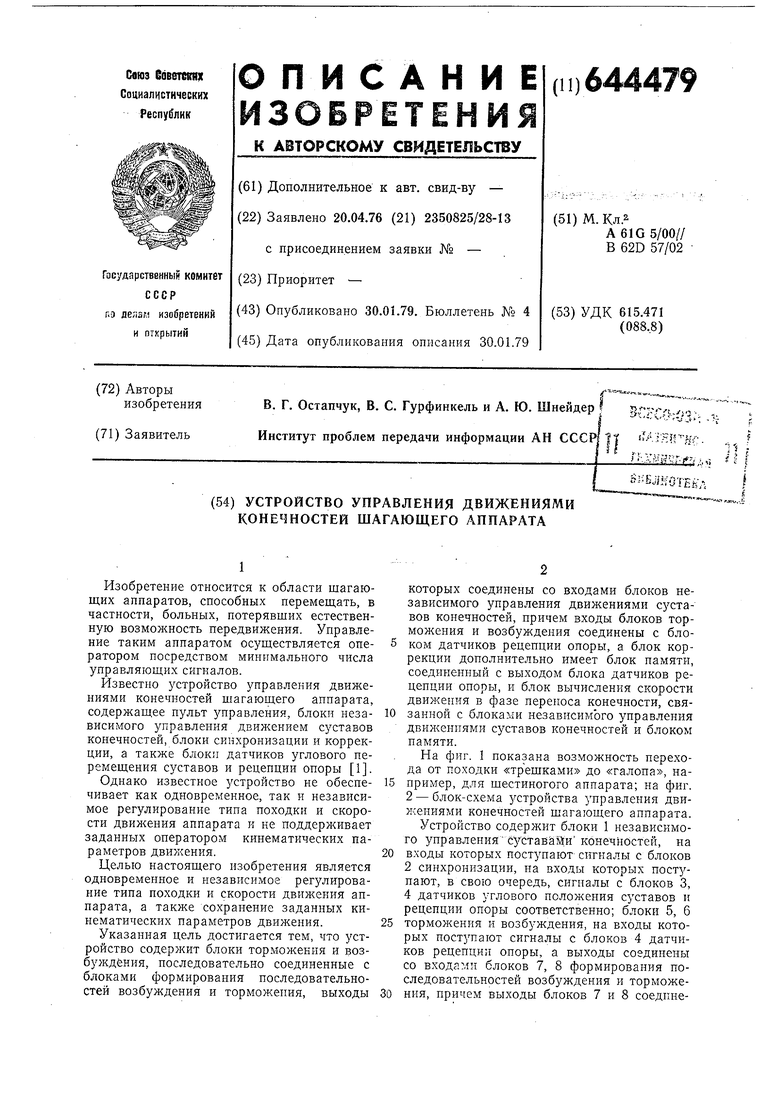

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ координации движений конечностей шагающего аппарата | 1976 |
|
SU621604A1 |
| Устройство управления движением шагающего аппарата | 1977 |
|
SU736975A1 |
| Устройство координации движений конечностей экзоскелетона | 1978 |
|
SU759099A1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2642020C2 |
| МНОГООПОРНАЯ ШАГАЮЩАЯ МАШИНА | 2003 |
|
RU2258624C2 |
| Способ управления движением четырехногого шагающего робота по пересеченной местности | 2023 |
|
RU2832498C1 |
| НОГА ШАГАЮЩЕГО АППАРАТА | 2014 |
|
RU2594316C2 |
| СПОСОБ ЛЕЧЕНИЯ ДЕТСКОГО ЦЕРЕБРАЛЬНОГО ПАРАЛИЧА В ФОРМЕ СПАСТИЧЕСКОЙ ДИПЛЕГИИ В ПОЗДНЕЙ РЕЗИДУАЛЬНОЙ СТАДИИ | 2013 |
|
RU2547086C1 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| Система супервизорного управления шагающего аппарата | 1989 |
|
SU1634488A1 |