Изобретение относится к области :автоматического управления электроприводом и может быть использовйн з, например, на линии нанесения металлических покрытий, при необходимости перемещения деталей по позициям и получения точных конечных положений объекта.. Известно устройство для управления реверсивными электроприводами, содержащее первый и второй датчики конечного положения объекта управле ния., прямые выходы которых соединен с первыми входами соответственно пе вого и второго элементов И, вторые входы которых соединены с щиной запуска, третий и четвертый элементы. первый и второй элементы ИЛИ, первы и второй блоки задержки, первый и второй инверторы и первый и второй усилители 1 . X . Недостаток известного устройства состоит в том, что в случае сбоя он не имеет возможности рб.еспечить Сс1м стоятельного возвращения объекта в одно из крайних положений без вмеша тельства оператора. Наиболее близким.по технической сущности к предлагаемому является устройство для управления реверсивным электроприводом, содержащее первый и второй датчики конечного положения объекта управления, прямые входы которых соединены с первыми входами соответственно первого и второго элементов И, вторые входы ко торых соединены сшиной запуска, третий и четвертыЯ элементы И, первый и второй элементы ИЛИ, первый и второй блоки задержки, первый и второй инверторы и первый и второй усилители. В этом устройстве инверсные выходы датчиков конечного положения объекта управления соединены с соответствующими входами третьего и четвертого элементов И, входы первого элемента ИЛИ - с выходами первого и третьего элементов И, а выход через первый блок задержки - с входами первого усилителя и второго инвертора, выход которого связан с третьим входом четвертого элемента И, выход которого подключен к одному из входов второго элемента ИЛИ, другой вход которого соединен с выходом второго элемента И, а выход через второй блок згщержки - со вторым усилителем и первым инвертором, выход которого соединен с третьим входом третьего элемента И 2 .
Недостатком описываемого устрой 1 а йВЛяё1йя- снижение надежности при работе . бойёшОгО.количества датчиков положения объекта.
Цель изобретения - расширение фуйкциональных возможностей устройства. Цель достигается тем, что в устройствб для управления реверсивным эле1 трс приводом, содержащее датчики положения объекта, два элемента И, первый элемент задержки, блок запуска, блок питания, первый, второй и третий инЕ|ерторы , причем третий инвертор связан- выходом со входами втОрого и четвертого элементов И, четвертый, пятый и шестой инверторы, щестой йнйертор связан выходом с ШрвьШвхОдом второго элемента задержки, и седьсой инвертор, введен релейный элемент, обмотка, которого Одним концом подключена к выходу датчиков положения объекта, входами соединенных с блоком запуска, а. другим концом - к- выходу блока питания, контакт релейного элемента подключен к перйому входу первого элемента И и к первому входу первого инвертора, выход которого через последовательно соединенные второй инвертор, первый элемент задержки, первый элемент И, третий инвертор, второй элемент И, Четвертый инвертор и пятый .инвертор подсоединен ко второму входу второго э.леменуа И и второму вхОду. вторОго элМИнта Задержки, выхОдОм соединейногО 6 йёрвым входом третьего элемента И, второй вход которого связан с вы ходом первого инвертора, вторым вхо- Йой тТОдключенного к выходу второго инвертора. Выход третьего инвертора соединен с первым входом чётвёртбгО элемента И, вйходоМ подключённого чёрёз последовательно, соединенные шестой и. седьмой инверторысо вторым ШЪдВмвто р6гО элемента; задержки и вторым входом четвертого элемента И, вторые входы четвертого и седьмого инверторов подключены к выходам блока запуска.
На чертеже представлена блок-схема
устройства. , . . ... . . .
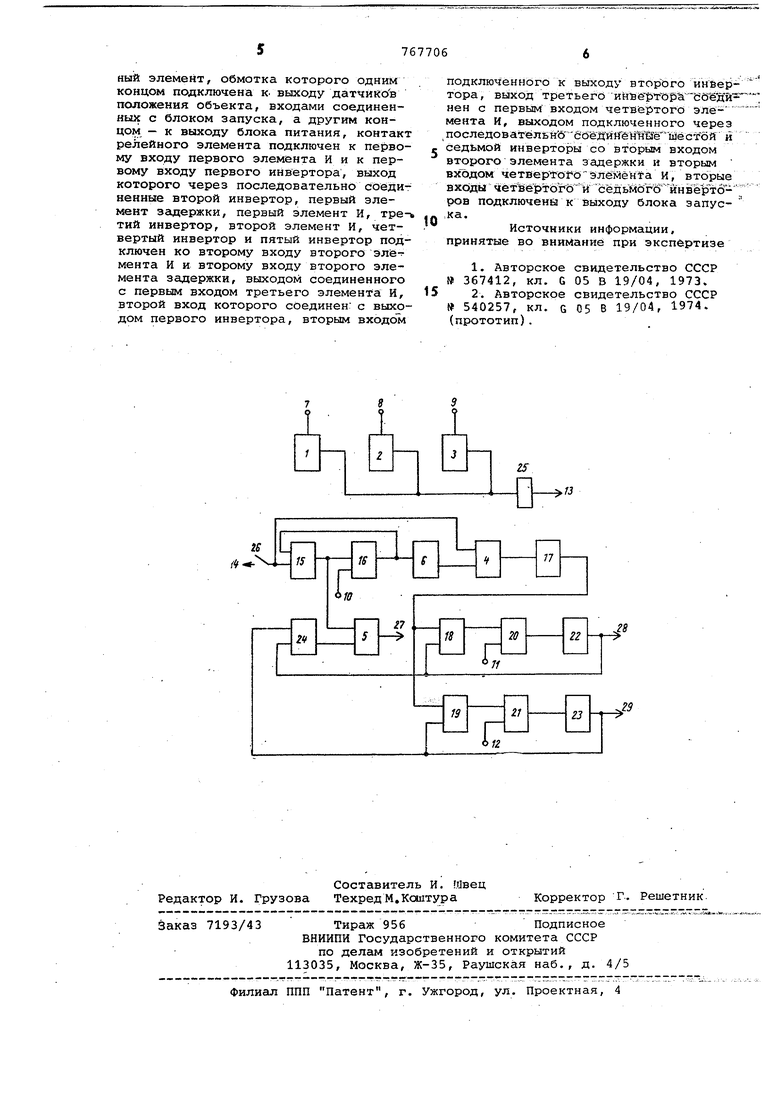
Она содержит датчики 1, 2, 3, положения объекта, первый 4 и третий 5 элементы И, первый элемент б задержки, выход 7-12 блока запуска, выходы 13, 14 блока питания, первый 15 и второй 16. инверторы, третий инвертор 17 соединенный со входами второго 18 и четвертого 19 элементов И, четвертый 20 и седьмой 21 инверторы, пятый 22 и шестой 23 инверторы, второй элемент 24 задержки,релейный элемент 25, контакт 26.
ПёрекЭтючеНие скоЕзО(ЙтЙ э:гШгФ| 6при-. вода осуществляется сигналом 27, выбор направления движения-сйгналами 28, 29. Возврат устройства для управления реверсивным электроприв
дом в исходное положение осуществляется, сигналом с блока запуска.
Работа устройства начинается с поступления сигналов запуска, причем Эти еигнальа определяют конечное положение - детали на линии (сигналы на вькодах 7, 8 или 9, действующие до достижения деталью нового положения) и направление движения к этому положению .(сигналы на выходах 11 или 12, действующие кратковременно). От этих йиГНалов включается позиции датчика 1 или датчика 3, появляются сигналы 28 или 29 перемещения детали в нужную сторону. Сигналы 28 или 29 действуют на протяжении всего времени перемещения детали, причем движение объекта начинается на низкой скоросТи. Через врёмя, определяемое элементом 24, с выхода элемента И 5 снимается сигнал 27, переключающий электропривод на высокую скорость. При этом превышение ускорений над доfiyefHMbiMK и снижение прочности узлов системы не наблюдается. При подъезде к задаваемой позиции срабатывает первый раз один из датчиков 1, 2, 3, подключенный к блоку запуска. Включается релейный элемент 25, подавая постоянное на пряжение своим контактом 26 на инвертор 15. Одновременно ин версный сигнал с выхода первого инвертора 15 поступает на вход третьего элемента И 5, сигнал на выходе котОрого пропадает, переключая таким образом электропривод на низкую скорость. При вторичном срабатывании одного из датчиков 1, 2,3 задаваемой позиции контактом 26 реле вторично подается постоянное напряжение на элемент И 4, с выхода которого снимается сйгйай, останавливающий деталь на заданной пЬзйции, так как на втором входе элемента И 4 присутствует первый сигнал, а на выходе инверторов 22, 23 пропадает сигнал 28 или 29.
Описываемое устройство позво;1яет
расширить функциональные возможности устройства.
Формула изобретения
Устройство для управления реверсивным электроприводом,- содержащее датчики положения объекта, два элемента И, первый элемент задержки, блок запуска, блок питания, первый, второй и третий инверторы, третий инвертор связан выходом со входами второго и четвертого элементов И, четвертый, пятый и шестой инверторы шестой инвертор связан выходом с первым входом второго элемента задерж;КИ, и седьмой инвертор, о т л и ji а ю щ е е с я тем, что, с целью расширения функциональных возможностей устройства, в него введен релейHbiiR элемент, обмотка которого одним концом подключена к. выходу датчиков положения объекта, входами соединенных с блоком запуска, а другим концом - к выходу блока питания, контакт релейного элемента подключен к первому входу первого элемента и и к первому входу первого инвертора, выход которого через последовательно соединенные второй инвертор, первый элемент задержки, первый элемент И, третий инвертор, второй элемент И, четвертый инвертор и пятый инвертор подключен ко второму входу второго элёмента И и второму входу второго элемента задержки, выходом соединенного с первым входом третьего элемента И, второй вход которого соединен: с выходом первого инвертора, вторым входбм
подключенного к выходу второго инвертора, выход третьего )Гара свЩйнен с первым входом четйёртого элемента И, выходом подключенного через , послеДоватёлйНб -сбёдйяГён1 № шёс-гой и J седьмой инверторы со вторым входом второго элемента задержки и вторым входом четвертого Элёйёнта и, вторые входы чётвёртог г сёдьмс):гб инвёрт6- ров подключена к выходу блока запус,ка.
10
Источники информации, принятые во внимание при экспертизе
1. Авторскоесвидетельство СССР
367412, кл. G05 В 19/04, 1973.
5 2. Авторскоесвидетельство СССР
540257, кл. G05 В 19/04, 1974. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реверсивным электроприводом | 1981 |
|
SU993209A1 |
| Устройство для управления реверсивным электроприводом | 1976 |
|
SU675401A1 |
| Электропривод переменного тока | 1981 |
|
SU1001417A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНЗИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ С РЕВЕРСИВНОЙ НУЛЕВОЙ СХЕМОЙ ВЫПРЯМЛЕНИЯ | 2001 |
|
RU2195758C1 |
| Устройство управления электродвигателями | 1981 |
|
SU1081621A1 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1422351A1 |
| Система терминального управления упругим объектом | 1987 |
|
SU1434403A1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2007 |
|
RU2344924C1 |
| ЭЛЕКТРОПРИВОД ТИРИСТОРНЫЙ АСИНХРОННЫЙ | 1995 |
|
RU2101847C1 |
| ЭЛЕКТРОПРИВОД С АВТОМАТИЧЕСКОЙ ПОДСТРОЙКОЙ ЧАСТОТЫ ВХОДНОГО ГАРМОНИЧЕСКОГО СИГНАЛА | 2008 |
|
RU2399079C2 |
111
S 3
СЬ
