(54) СИСТЕМА УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1981 |
|
SU951234A1 |
| Устройство для автоматического управления | 1980 |
|
SU868699A2 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1994 |
|
RU2113005C1 |
| Устройство для управления электроприводом робота | 1988 |
|
SU1553376A1 |
| Устройство для управления инерционным объектом | 1977 |
|
SU744449A1 |
| Система автоматического управления инерционным объектом | 1977 |
|
SU962849A1 |
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU447683A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Устройство для автоматической раз-гРузКи гидРОКлАССифиКАциОННыХ АппА-PATOB | 1979 |
|
SU812346A1 |
| Устройство для управления нагревом электротермической установки | 1989 |
|
SU1817258A1 |
1
Изобретение относится к технической кибернетике и автоматическому регулированию и может быть использовано в качестве субоптимальной по быстродействию системы управления летательными аппаратами, электродвигателями, энергоблоками, химико-технологическими процессами и т. п.
Известны системы которые обеспечивают субоптимальное, по быстродействию управление 1 .
Наиболее близкой по технической cyuiности к изобретению является система управления, содержащая k линейных преобразователей, k релейных преобразователей и k-1 сумматоров. Вход каждого линейного преобразователя соединен с выходом объекта управления. Выход первого линейного преобразователя подключен ко входу первого релейного преобразователя, выход (i+ 1)-го линейного преобразователя соединен с одним из входов i-ro сумматора. Другой вход i-ro сумматора подключен к выходу i-ro релейного преобразователя. Выход i-ro сумматора соединен с входом (i+)-ro релейного преобразователя 2.
Недостатком этой системы является сравнительно невысокое качество управления, которое обусловлено тем, что при малых отклонениях динамических характеристик объекта от заданных система управления вырабатывает и подает на объект управления максимальные по величине управляющие сигналы, в результате чего она попадает в автоколебательный или вибрационный режим.
Целью изобретения является повышение качества управления.
Эта цель достигается тем, что предложенная, система управления дополнительно содержит задатчик напряжения срабатывания, k выпрямителей и k релейных элементов. Вход -го выпрямителя соединен с вы-ходом i-ro линейного преобразователя, а выход - с первым входом 1-го релейного эле.мента. Второй вход i-ro релейного э.пемента подключен к задатчику напряжения срабатывапия. Размыкающий контакт первого релейного элемента соединен с выходом первого линейного преобразователя. Размыкающий контакт (+ 1)-го релейного элемента подключен к подвижному контакту i-ro релейного эле.мента. Замыкающий контакт i-ro релейного эле.мента соединен с выходом i-го релейного преобразователя, а подвижный контакт k-ro релейного элемента подключен к входу объекта управления.
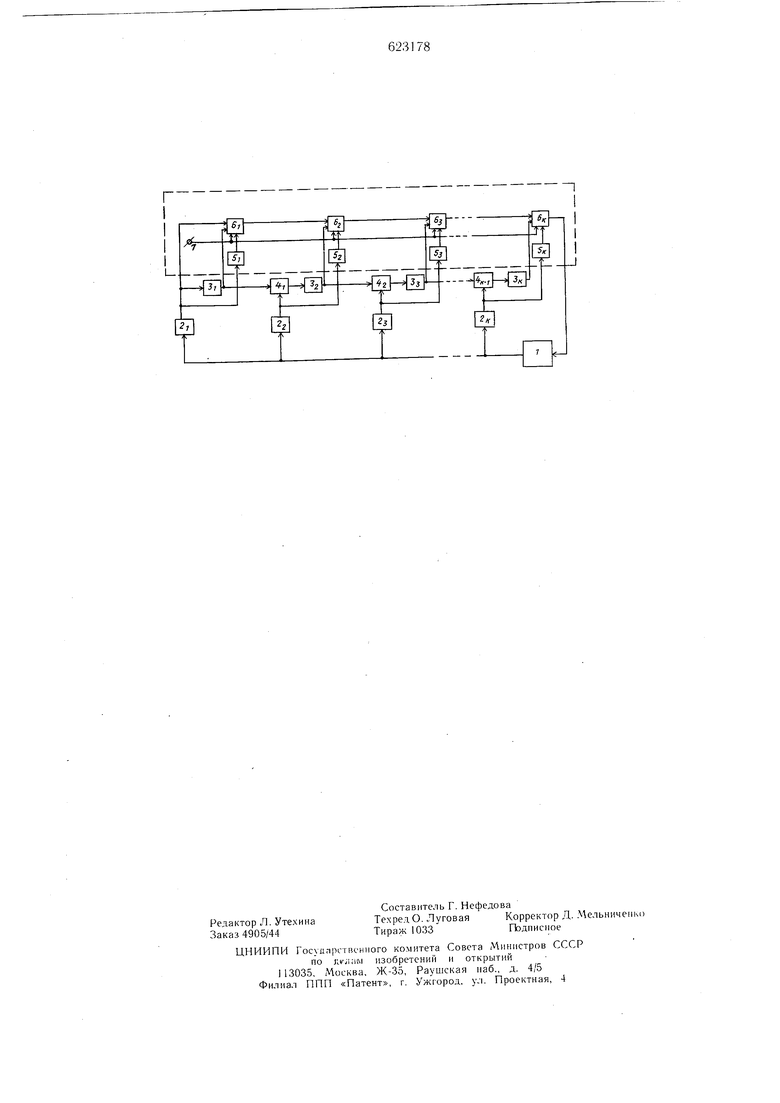
На чертеже дана структурная схема предлагаемой системы управления.
Она содержит объект управления 1, k линейных преобразователей 2i-2 к, k релейных преобразователей 3i-Зк k-1 сумматоров 4|-4k... k выпрямителей 5i-5к k релейных элементов 6;-6k и задатчик напряжения срабатывания 7.
Система работает следующим образом.
При малых величинах сигнала на выходе объекта 1 малы сигналы, поступающие на обмотки элементов 6i-бн поэтому на вход объекта 1 поступает сигнал, проходящий через размыкающие контакты этих элементов. Этот сигнал формируется в первом линейном преобразователе 2 (т. е. при малых отклонениях управление осуществляется по линейному закону). Линейный закон можно выбрать таким образом, чтобы замкнутая система была нечувствительна к внешним возмущениям и вариациям параметров. При достижении сигналов на выходе i-ro преобразователя 2 заданного уровня элемент 6 замыкает другой контакт и разрывает цепь, соединяющую выход преобразователя 2, с в.ходом объекта 1. При этом на его вход поступает сигнал с одного из выходов пре. образователей 3i-3. равным по величине макси.мальному значению управляющего сигнала (при превыщении сигналами на выходах преобразователей 2:-Ij. .заданного уровня управление внфабатывается по ре,лейному закону).
Коэффициенты линейных преобразователей могут быть выбраны таким образом, что релейный закон будс; обеспечивать субоптимальные по быстродействию процессы отработки рассогласований.
Использование системы позволяет повысить качество процессов, расщирить область устойчивости замкнутых систем при ограниченных управляющих сигнал , сохранить быстродействие, исключить вибрационные и автоколебательные режимы, что повысит динамическую точность и надежность.
Кроме того, предлагаемая система конструируется однотипно для объектов различной раз.мерности и различной структуры из унифицир(И5амн1 1Х блоков, содержащих только выпрямители, релейные и линейные элементы.
Точность приближения к оптимальной по быстродействию системе определяется числом таких блоков, что в принципе не увеличивает сложность системы,управления.
Формула изобретения
Система управления, содержащая k линейных преобразователей, k релейных преобразователей и k-1 сумматоров, вход каждого линейного преобразователя соединен с выходом объекта управления, выход первого линейного преобразователя подключен к входу первого релейного преобразователя, выход (i-l-l)-ro линейного преобразователя соединен с одним из входов i-ro сумматора, другой вход i-ro сумматора подключен к выходу i-ro релейного преобразователя, выход i-ro сумматора соединен с входом (i-fl)-ro релейного преобразователя, отличающаяся тем, что, с целью повышения качества управления, система управления содержит задатчик напряжения срабатывания, k выпрямителей и k релейных элементов; вход 1-го выпрямителя соединен с выходом i-ro линейного преобразователя, а выход - с первым входом i-ro релейного элемента; второй вход 1-го релейного элемента подключен к задатчику напряжения срабатывания; размыкающий контакт первого релейного элемента соединен с выходом первого линейного преобразователя, размыкающий контакт (i + l)-ro релейного элемента - с подвижны.м контактом 1-го релейного элемента; замыкающий контакт i-ro релейного эле.мента соединен с выходом i-ro релейного преобразователя, а подвижный контакт k-ro релейного элемента подключен ко входу объекта управления.
Источники информации, принятые во внимание при экспертизе:
г
