рому также подключен выход блока 12 дифференцирования.
Устройство работает следующим образом.
Питание обмоткн 5 осуществляется от уснлителя тока 9.
При этом подвижная катушка 4 вибратора подвергается действию электромагнитной силы, пропорциональной току на выходе усилителя 9.
Перемещение иодвил- ной катушки 4 происходит при этом по закону, определяемому уравнением вида:
R+x(mp +hp+c)F,(1)
где R - сила реакции, действующая между испытываемым объектом и подвижной катушкой 4; т-масса подвижной части вибратора
(подвижной катущки); X - положение иодвижной системы; с - коэффициент жесткости подвижной
части вибратора;
/г - коэффициент демпфирующих сил;
F - электромагнитная сила, действую,,
щая на подвижную катушку ви&ратора;Р - оператордифференцирования
(Р). di
Обратная связь, состоящая из датчика 10 и блока 11 обратной связи, служит для создания электромагннтной подвески с коэффициентом жесткости.
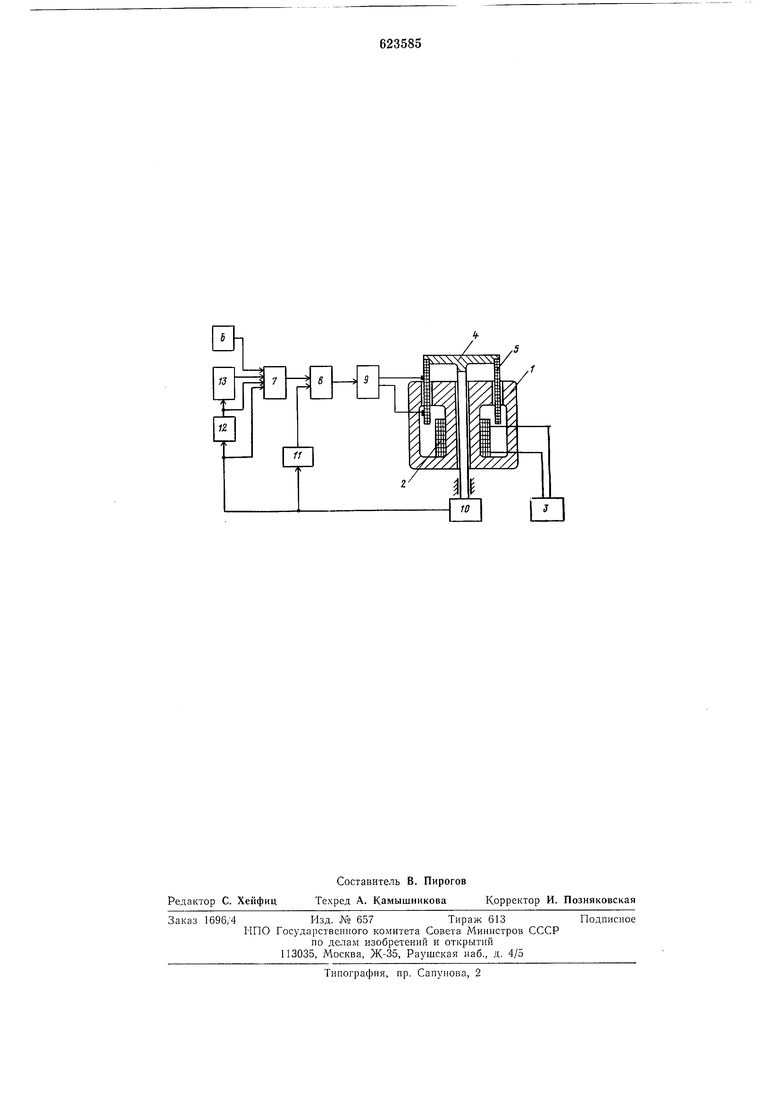
Па выходе задающего гсиератора б формируется сигнал нронорциональный снле fa, которую нужно Передавать испытываемому объекту. Сигнал с выхода генератора и ностуиает на вход сумматора 7 и через сумматор 8 на усилитель тока 9, который создает ток в оОмотке 5, обеспечивающи возникновение силы, действующей на подвижную катушку, равную Кроме того, сигнал, нронорциональный положению катушки 4 X, поступает через коэффпциент с на вход сумматора 7, а также в Олок днфференцирования l2, с выхода которого через коэффициент, равный /г, поступает в сумматор 7, на другой вход которого поступает тот же сигнал с выхода Ьлока 12 через блок дифференцирования и коэффициент, равный т.
Таким образом, на выходе сумматора 7 образуется напряжение, пропо.рциопальное велпчине, которое создает в обмотке 5 катушкп 4 ток, развивающий силу, равпую
cx- ix-i-mx x(mp2+
+ hp+c)+Fa(2)
Из уравнений (I) и (2) следует, что при правильно выбранных коэффициентах суммирования сумматора 7
(3)
т. с. сила, действующая на испытываемый объект, равна силе, задаваемой задающим генератором как по фазе, так и по амплитуде.
Равенство (3) не изменяется при любой сложности испытываемого объекта и не зависит от него, а коэффициенты т, с и h являются только коэффициентами самого электродинамического вибратора.
Для более высокой точности получения равенства (3) по выщеописаппому принцину в системе могут быть включены корректирующие цепи, компенсирующие влияния пелинейностей нараметров т, 1г, с вибратора, а также различных явлений в электрической цепи.
Подключение к входу первого блока дифференцнровання выхода датчика иоложения иодвижной катушки, который также подключей к входу первого сумматора, позволяет передавать па испытываемый объект усилия, совпадающие но форме и фазе с снгналом задающего генератора, в том числе сил разных тестовых форм н случайные
е заданными характеристиками. При этом структура испытываемого объекта не нмеет значения. Это нозволяет также расширить область иримеиения электродинамических вибраторов и во многих случаях уменьшить
сложность проведення экспернментов и получить новые характеристики.
Формула изобретения
Электродинамический вибратор, содержащий магнитонровод с обмоткой нодмагничивания, установлеиной в воздушном зазоре магнитонровода, нодвижную цилиндрнческую катушку, длнна которой больше
длины воздушного зазора, задающий генератор, подключенный к нодвижной катушке через иоследовательно соединенные первый и второй сумматоры, и усилитель тока, два носледовательио соединенных блока дифферепцировапия, выходы каждого из которых подключены к входам первого су.мматора, а также цепь обратной связи, состоящую из последовательно соединенных датчика положения нодвижной катушки и блока обратной связи, выход которого подключен к второму входу второго сумматора, отличающийся тем, что, с целью иолучения заданного снлового воздействия на объект, выход датчика положепия подвижной катушки нодключен к входу нервого блока дифференцирования и к входу нервого сумматора.
Источники информации, принятые во внимание ири экспертизе
1. Авторское свидетельство СССР JMa 532402, кл. В 06В 1/04, 1975.
2. Заявка N° 2300182/10, кл. В 06В 1/04, 19/6, по которой принято решение о выдаче авторского свидетельства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический вибратор | 1975 |
|
SU546386A1 |
| Электродинамический вибратор | 1977 |
|
SU659199A1 |
| Электродинамический вибратор | 1980 |
|
SU977047A1 |
| Электродинамический вибратор | 1980 |
|
SU902861A1 |
| Электродинамический вибратор | 1980 |
|
SU869842A1 |
| Электродинамический вибратор | 1979 |
|
SU835528A1 |
| Устройство для полунатурного моделирования колебательных систем | 1980 |
|
SU922800A1 |
| Электродинамический вибратор | 1981 |
|
SU986509A1 |
| Электродинамический вибратор | 1975 |
|
SU568467A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1991 |
|
RU2016667C1 |