Изобретение относится к электротехнике, в частности к реверсивным шаговым электродвигателям, и может быть использовано в качестве исполнительного двигателя в устройствах, имеющих рабочий орган с дискретным поступательным перемещением.
Известны линейные щаговые электродвигатели, содержащие статор с двумя зубчатыми магнитопровода.ми, постоянными магнитами, обмоткой управления и якорь, выполненный в виде пластины с чередующимися по его длине магнитными и немагнитными участками и перемещающийся между пакетами 1.
Однако известный двигатель имеет сравнительно низкое тяговое усилие.
TI„ „„
Известен также линейный щаговыи электродвигатель, тяговое усилие которого увеличено за счет того, что якорь выполнен в виде нескольких параллельных между собою пластин 2.
Однако этот двигатель сложен по конструкции, так как в нем дополнительно установлен внутренний статорный пакет, и имеет пониженные энергетические показатели вследствие увеличения общего воздущного
зазора между подвижными и неподвижными элементами конструкции.
Целью изобретения является упрощение конструкции и повышение энергетических показателей линейного шагового электродвигателя.
Это достигается тем, что в линейном шаговом двигателе зубцы различных магнитопроводов выполнены удлиненными и сдвинуты друг относительно друга в направлении, движения якоря, образуя переменно-полюсную магнитную систему, и имеют в поперечном сечении форму гребенки, в пазах которой размещены пластины якоря.
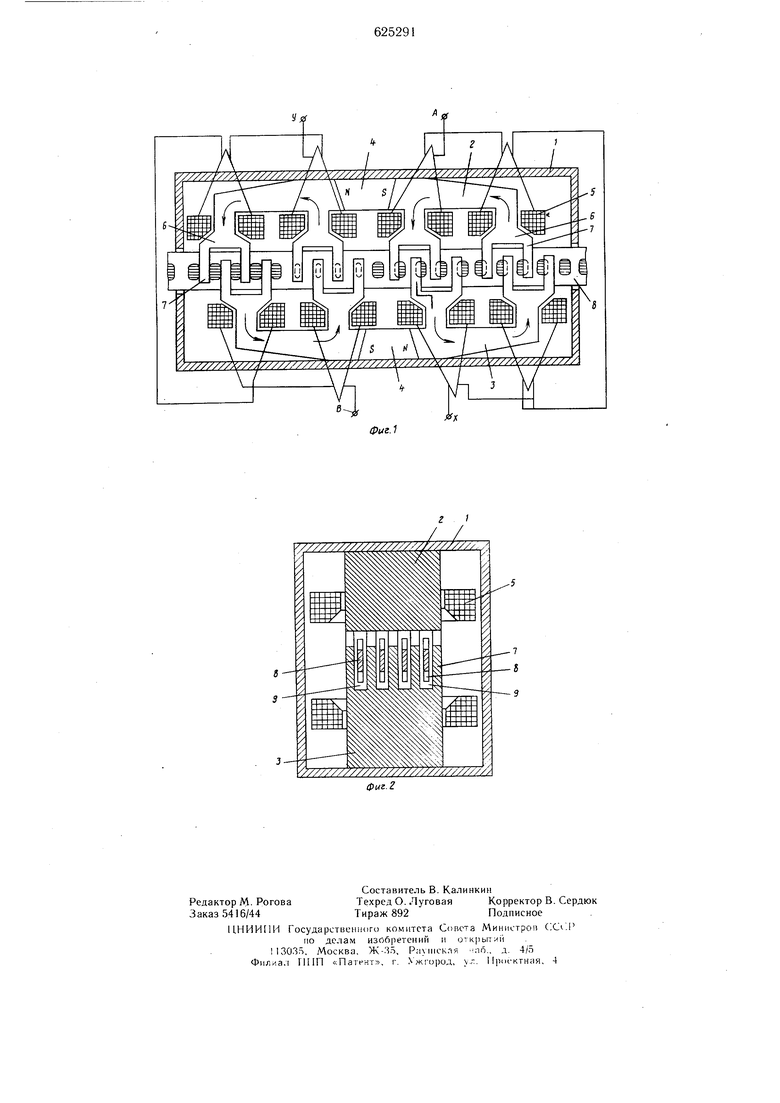
На фиг. I изображен предлагаемый двигатель, продольный разрез; на фиг. 2 - то же, поперечный разрез.
Двигатель содержит корпус 1, в котором установлены два зубчатых магнитопровода 2 и 3 с постоянными .магнитами 4 и обмоткой 5 управления, напрм.мер двухфазной А-х и В-у. Магнитопрозоды 2 и 3 имеют выступы 6 с зубцами 7, высота которых соизмерима с шириной пластин 8 якоря. Зубцы 7 магнитопровода 3 смещены относительно зубцов магнитопровода 2 так, что
зубцы обоих магнитопроводов образуют переменно-полюсную магнитную систему в направлении движения якоря, состоящего из параллельных друг другу пластин .на фиг. 2 их четыре). Пластины якоря с зазорами расположены Б пазах 9 зубцов 7.
Двигатель работает следующим образом.
Если положение якоря, изображенное на фиг. 1, принять за исходное, а заштрихованные части пластин 8 считать магнитными участками, то при нодаче и.мпульса тока в фазу А-х обмотки 5 управления в правой части магнитной цепи статора, на которой размещена фаза А-х, возникает магнитный поток, направление которого будет, например, против часовой стрелки. В этом случае в крайних зубцах правой части магнитной цепи ноток будет больше, чем в зубцах, расположенных ближе к постоянным магнигам 4, благодаря чему возникает усилие, которое перемещает якорь на 1/4 шага чередования магнитных и немагнитных участков на якоре (шага зубцов якоря) в направлении слева направо. При отсутствии тока в об.мотке якорь будет фиксироваться силями магнитного потока постоянных .магнитов.
При нодаче следующего импульса в фазу В-у с полярностью,обеспечивающей направление магнитного потока в левой части магнитной цепи статора тоже против часовой стрелки, якорь перемещается еще на 1/4 шага зубцов якоря в том же направлении Изменение полярности импульсов при соблюдении очередности их подачи в фазы обмотки приводит к двухкратному перемещению якоря в том же направлении по 1/4 щага якоря при каждом импульсе. Таким образом, после четырех импульсов, поочередно подаваемых в фазы обмотки со сменой полярности, якорь двигателя перемещается на полный щаг зубцов, после чего процесс повторяется.
Изменением числа полюсных выступов у двигателя можно увеличить число фаз
двигателя, что обеспечит у.меньшение шага якоря.
При расщеплении фаз обмотки управления возможно применение других способов управления, напри.мер, по четырехтактной схеме с однополярными импульсами или по Е-сьмитактной.
Благодаря рассмотренному расположению зубцов и их гребенчатой форме в предлагаемом двигателе отпала необходи.мость во внутреннем статоре, который имеется у известного двигателя, и уменьшен общий воздущный зазор в магнитной цепи двигателя, что привело соответственно к упрощению конструкции двигателя и повыщению
его энергетических показателей.
Формула изобретения
Линейный шаговый электродвигатель, содержащий статор с двумя зубчаты.ми магнитопроводами, постоянными магнитами и обмоткой управления и якорь, выполненный в виде параллельных пластин с чередующимися по длине магнитными и немагнитными участками, отличающийся тем, что, с целью упрощения конструкции и повышения энергетических показателей, зубцы различных магнитопроводов выполнены удлиненными и сдвинуты друг относительно друга в
направлении движения якоря, образуя переменно-полюсную магнитную систему, и и.меют в поперечном сечении фор.му гребенки, в пазах которой раз.мещены пластины якоря.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 192895, кл. Н 02 К 33/10, 1967.
2.Авторское свидетельство СССР № 379025, кл. Н 02 К 41/06, 1969.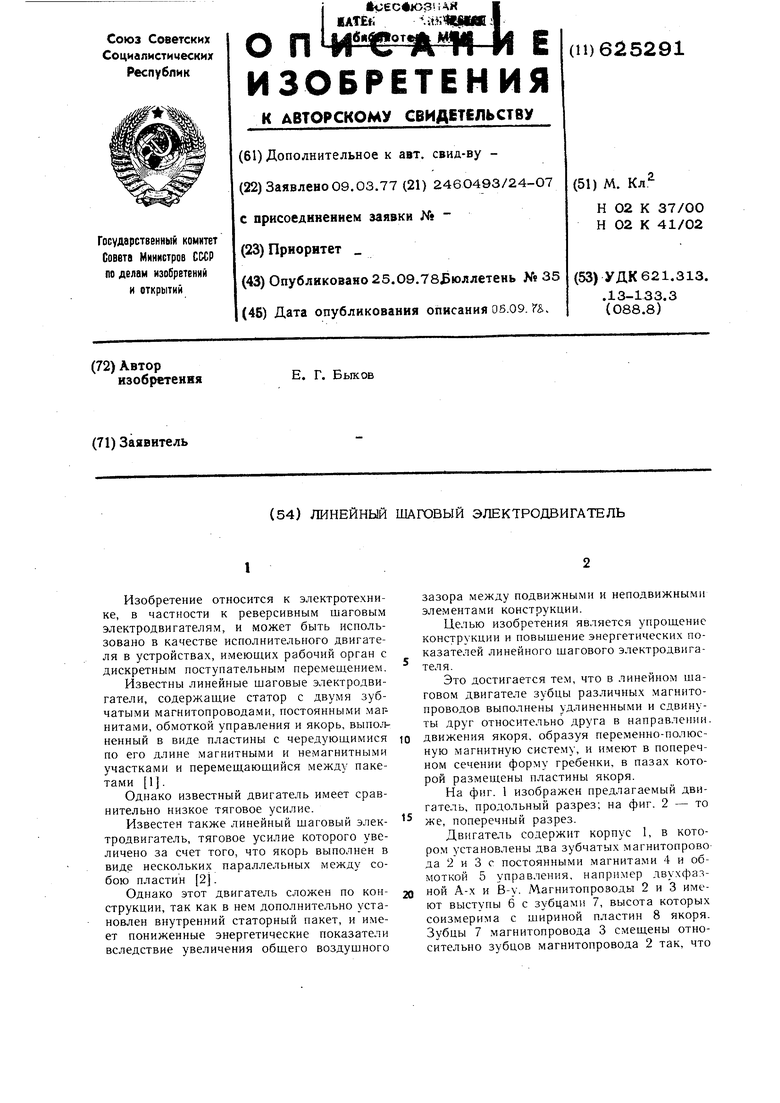
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2366066C1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| Шаговый электродвигатель | 1986 |
|
SU1387128A1 |
| Способ построения линейного электропривода | 2020 |
|
RU2762288C1 |
| ЙНБЛИОТьНА8 | 1973 |
|
SU379025A1 |
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
| Шаговый электродвигатель | 1987 |
|
SU1826109A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| Шаговый электродвигатель ГНОМ | 1987 |
|
SU1732415A1 |