Изобретение относится к области псев- долинейных корректирующих устройств и может быть использовано для повьпиения точности автоматических систем.
Известны псевдолинейные корректируюнше устройства систем автоматического . управления, содержащие фильтры, блоки взятия модуля, реле, блоки умножения
МИ
Недостатком этих устройств является ;ТО, что юии не- обеспечивают необходимую точность систем автоматического управления при воздействии на последние возмущений.
Наиболее близким по технической сущности к изобретению является псевдолинейное корректирукмцее устройство, содержащее последовательно соединенные блок выделения модуля, первый сумматор и первый блок умножения, фильтр, вход которог соединен с входом блока вьзделения модуля, а выход через первое реле - со вторы входом первого блока умножения и с первым входом второго сумматора, второй вход которого соединен с выходом второ-
го реле, а выход через третье реле и первый интегратор соединен с соответствующими входами второго блока умножения, выход которого соединен со вторым вхоцом первого сумматора з . Основной недостаток известного устройства заключается в том, что псевдолинейное корректирующее устройство, повышая точность корректируемых систем, одновременно, из-оа формы подключаемого к сумматору сигнала, ухудшает фазовую характеристику системы и, таким образом, ухудшает ycTOthiHBocTb систем.
Целью изобретения является улучшение фазовой характеристики псевдолинейчого корректирующего устройства.
Это достигается тем, что в предлагаемом устройстве установлен второй интегратор, вход когорого соединен с входом фильтра, а выход - с входом второго реле.
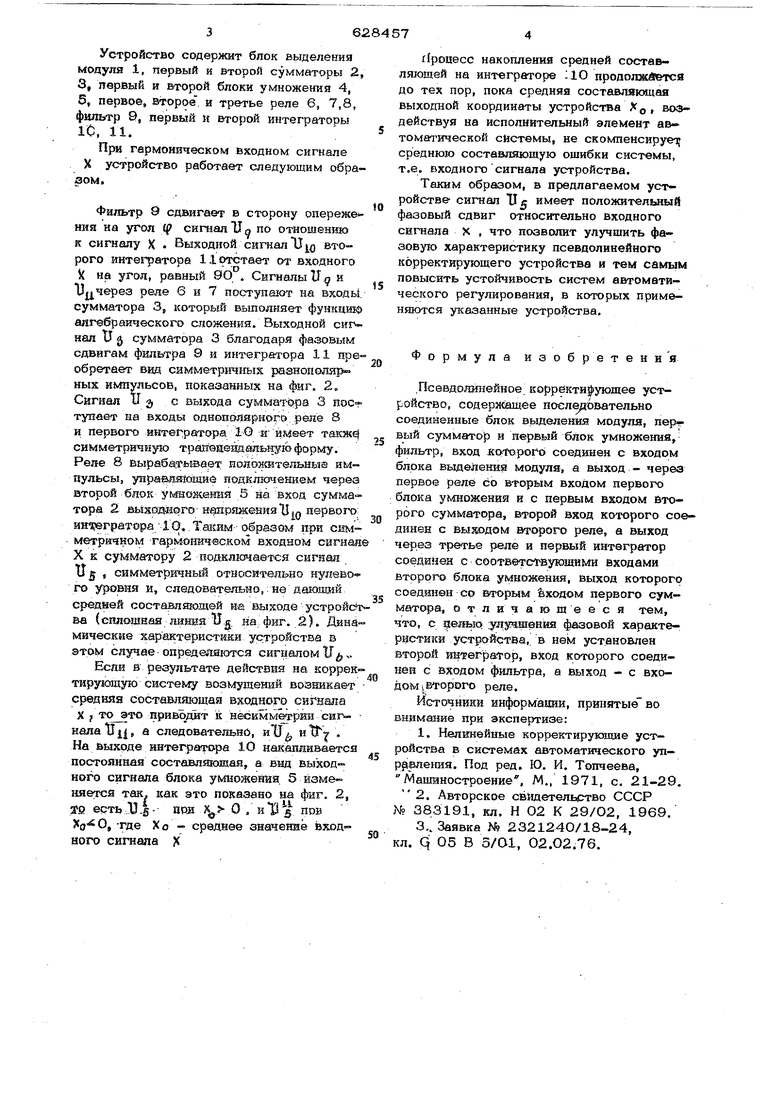
На фпг. 1 показана блок-схема описываемого устройства; на фиг. 2 -эпюры напряжений, где ф -сдвиг фаз, 11- -выходное напр51женне-го функционального блока, х- входной сигнал. Устройство содержит блок выделения модуля 1, первый к второй сумматоры 2, 3, первый и второй блоки умножения 4, 5, первое, второе, и третье реле 6, 7,8, фильтр 9, первый и второй интеграторы Ю, 11. При гармоническом входном сигнале X устройство работает следующим образом. Фильтр 9 сдвигает в сторону опереже ния на угол ф сигналив по отношению к сигналу X . Выходной сигнал и второго HHTej-pa-ropa li отстает от входного k на угол, равный 9О . Сигналы П и и через p&ite 607 поступшот на вкодУ. сумматора 3, который вьшолняет функцшф алгебраического сложения. Выходной сигнал tJ g сумматора 3 благодаря фазовым сдвигам фильтра 9 и интегратора 11 преобретает ваа симметричггых разнополя - ных импульсов, показанных на фиг, 2. Сигнал tl g с выхода сумматора 3 пост тупает на входы однопсзлярного реяё 8 и яервого интегратора 10 И имеет такж симметричную трб 1Ла@да.ш«1ук) форму. Реле 8 вырабаяг-ьюа.ет иойонштельны® импульсы, унравдааощнй подключением через второй блок умиожеиия S на вход сумма- тора 2 выяодаого наряжения U первого; HJiijerpa opa 10,. Таким оёразом при симметричном тарм-огшч-еском входном сигнане X к сумматору 2 йодклю шетея сигная 115 « симметричньй отысюйтельво нуиевсн. го уровня и, следоватета но, не дающий средней составляюа1ей ий выходе устройс г ва (сияошнаа линияUg. на фиг. 2). Динамические характеристики устройства в этом случае определяются сигналом U ч. Если S резу 1ьтате действия на корректирующую систему возмущений возникает средняя составлшошая входного сигнала X J приводит к нёсиммётргш сигнала tJ ц, а следовательнй, иЦ На выходе интегратора Ю накйпяиваетса постоянная составляющая, а вид выходного сигнала блока умножения 5 изменяется так. как это показано на фиг. 2, 3fe ecTb.H-g- ири О . 5 0 О, -где X о - среднее значение 1входного сигнала rfpouecc накопления средней составлшощей на интеграторе НО продолжйвтся до тех пор, пока средняя составляющая выходной координаты устройства Хд , воздействуя на исполнительный элемент автоматической системы, не скомпенсирует среднюю составляющую ошибки системы, т.е. входного сигнала устройства. Таким образом, в предлагаемом устройстве сигнал Us имеет положительный фазовый сдвиг относительно входного сигнала X , что позволит улучшить фазовую характеристику псевдолинейного корректирующего устройства и тем самым повысить устойчивость систем автоматического регулирования, в которых применяются указанные устройства. Формула изобретения .Псеадолииейное корректирующее устройство, содержащее последовательно соединенные блок вьзделения модуля, первый сумматор и первый блок умножения,фильтр, вход jKafoporo соединен с входом блока выделения модуля, а выход - через первое реле со вторым входом первого блока ушюженйя и с первым входом второго сумматора, втсфой вход которого соединен с выходом второго реле, а выход через третье реле и первый интегратор соединен с соответствующими входами Второго блока умножения, выход которого соединен со вторым ёходом первого сумматора, отличающееся тем, что, с feabjQ улучшения фазовой характеристики устройства, в нем установлен второй интегратор, вход которого соединен с входом фильтра, а - с входом j второго реле. Источники информадаи, принятые во внимание при экспертизе: 1. Нелинейные корректирующие устройства в системах автоматического упр 1ше1гая. Под ред. Ю. И. Топчеева, Машиностроение , М., 1971, с. 21-29. 2. Авторское свидетельство СССР № 383191, кл. Н 02 К 29/О2, 1969. 3.. Заявка № 232124О/18-24, кл. Q 05 В 5/01, 02.02.76.
г/.
uz.i
| название | год | авторы | номер документа |
|---|---|---|---|
| Псевдолинейное корректирующее устройство | 1979 |
|
SU851332A1 |
| Псевдолинейное корректирующее устройство | 1978 |
|
SU748340A1 |
| Псевдолинейное корректирующее устройство | 1977 |
|
SU703772A1 |
| Нелинейное корректирующее устройство | 1978 |
|
SU750421A1 |
| Псевдолинейное корректирующее устройство | 1976 |
|
SU640248A1 |
| Нелинейное корректирующее устройство с фазовым опережением | 1988 |
|
SU1718182A1 |
| Нелинейное корректирующее устройство | 1977 |
|
SU708299A1 |
| Псевдолинейное корректирующее устройство для систем управления | 1982 |
|
SU1076870A1 |
| Нелинейное изодромное корректирующее устройство | 1978 |
|
SU767699A1 |
| Псевдолинейное корректирующее устройство | 1978 |
|
SU750422A1 |
.
4
У
Д.,, г-
S Хх ,
.
3
wi
т
х
йТ
X.
.NN ....
w
