1
Предлагаемое устройство относится к корректирующим устройствам систем автоматического управления (САУ), которые используются для повышения точности и помехоустойчивости САУ.
Известны двухконтурные нелинейные корректирующие устройства, содержащие динамические звенья, блоки выделения модули, реле, блоки умножения и сумматоры 1, 2. и 3.
Из известных корректирующих устройств наиболее близким по технической сущности к данному изобретению является нелинейное корректирующее устройство, содержащее первое реле, первый блок выделения модуля, вход которого соединен со входом апериодического звена, через последовательно соединенные фазоопережающее звено и второе реле - с первым входом первого блока умножения и через последовательно соединенные интегратор, второй блок выделения модуля и второй блок умножения - с первым входом первого сумматора, второй вход которого соединен с выходом первого блока выделения модуля, а выход - со вторым входом первого блока умножения 4.
Недостатком известного устройства является то, что оно обладает плохой помехозащищенностью.
Цель изобретения - повышение помехозащищенности устройства.
Поставленная цель достигается тем, что в устройстве установлены элемент разнозначность и второй сумматор, входы которого подключены соответственно к выходам интегратора и апериодического звена, а выход - ко входу первого реле, выход которого через элемент разнозначность подключен ко второму входу второго блока умножения.
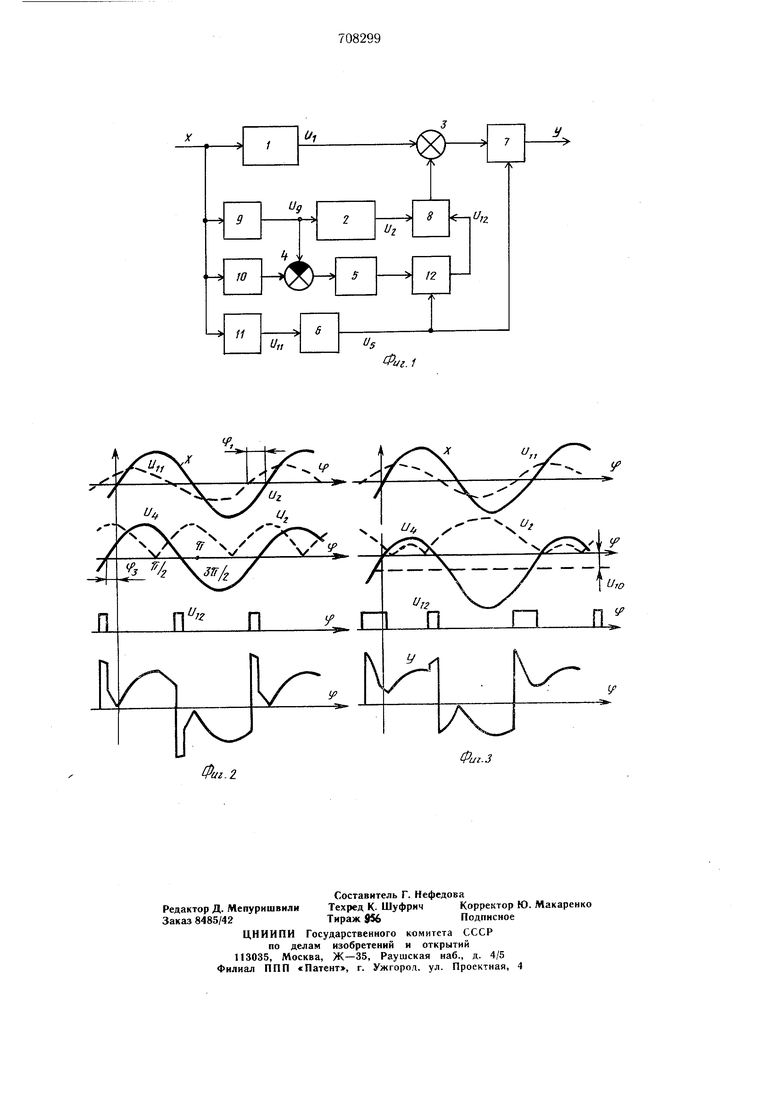
На фиг. 1 представлена блок-схема устройства; на фиг. 2, 3 - эпюры напряжений.
На фигурах приняты следующие обозначения: первый и второй блоки выделения модуля - 1, 2; первый и второй сумматоры -т3, 4; первое и второе реле - 5, 6; первый и второй блоки умножения - 7, 8; интегратор - 9; апериодическое звено - 10; фазоопережающее звено - 11; элемент разнозначность - 12; X - входной сигнал; у - выходной сигнал; U - выходной сигнал i-oro блока. Усгройстзо работает следующим образом. При подаче на вход устройства гармонического сигнала х без средней составляющей хо выходное напряжение U,, фазоопережающего звена 11 опережает сигнал х на угол Р| . Выходные напряжения интегратора 9 и апериодического звена 10 отстают от сигнала X на углы л/2 и f соответственно. Напряжение Uj на выходе сумматора 3 симметрично относительно оси f и сдвинуто относительно сигнала х на положительный угол фз (фиг. 2). Выходное напряжение интегратора UQ также поступает на вход второго блока выделения модуля 2, с выхода которого напряжение Da поступает через второй блок умножения 8, выполняющий функции ключевого элемента, на первый вход сумматора 3, на второй вход которого поступает напряжение Uj с выхода первого блока выделения модуля 1. Выходные напряжения сумматора 4 и фазоопережающего звена 11 через реле 5 и 6 поступают на элемент равнозначность 12, вырабатывающий напряжение Uia в те промежутки времени, когда не совпадают знаки Ui и и. Напряжение с выхода элемента 12 поступает на второй вход второго блока умножения 8, управляя подачей напряжения Ut на сумматор 3, а сигнал Ue с выхода второго реле 6 поступает на первый вход первого блока умножения 7, на второй вход которого поступает напряжение с выхода сумматора 3. Итак, при отсутствии возмущений в системе, т. е. при хо О, напряжение Uta вырабатывается в первую четверть периода колебаний х сигнала. При этом Uj. подключается в амплитудный канал в промежутки существования Uti и, несмотря на отрицательный фазовый сдвиг Us относительно X, оказывает фазоопережающее влияние на выходной сигнал у устройства. Поэтому использование интегратора не ухудшает, а улучшает устойчивость системы, в составе которой используется данное коррек. тирующее устройство. В случае воздействия на систему автоматического уд1равления возмущений в составе X появляется постоянная составляющая Хо, которая накапливается на интеграторе 9, что приводит к смещению относительно оси Ф напряжения J (фиг. 3). При этом происходит также изменение длительности импульсов напряжения Uia так, что выходное выпрямленное напряжение интегратора 9 поступает в амплитудный канал (на вход сумматора 3) только в.гюлижительный полупериод сигнала х. Таким образом, в выходном сигнале устройства Y появляется средняя составляющая компенсирующая вызванную возмущением ошибку системы управления. В устройстве устанавливается такой режим работы, когда продолжительность подключения интегратора 9 в амплитудный канал (на вход сумматора 3) уравновешивает действие возмущения. Применение предлагаемого нелинейного корректирующего устройства обеспечивает устойчивость свободных движений корректируемой системы, улучшая в 2-3 раза ее динамические показатели. При действии на систему возмущений типа линейно изменяющегося входного сигнала и изменяющегося момента нагрузки в системе происходит компенсация ошибок внавтоколебательном высокочастотном режиме. Формула изобретения Нелинейное корректирующее устройство, содержащее первое реле, первый блок выделения модуля, вход которого соединен со входом апериодического звена, через последовательно соединенные фазоопережающее звено и второе реле - с первым входом первого блока умножения и через последовательно соединенные интегратор, второй блок выделения модуля и второй блок умножения - с первым входом первого сумматора, второй вход которого соединен с выходом первого блока выделения модуля, а выход - со вторым входом первого блока умножения, отличающееся тем, что, с целью повыщения помехоустойчивости устройства, в нем установлены элемент разнозначность и второй сумматор, входы которого подключены соответственно к выходам интегратора и апериодического звена, а выход - ко входу первого реле, выход которого через элемент разнозначность подключен ко второму входу второго блока умножения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 310226, кл. G 05 В 5/01, 1969. 2.Заявка № 2484698, кл. G 05 В 5/01, 16.05.77, по которой принято решение о выдаче авторского свидетельства. 3.Авторское свидетельство СССР № 387332, кл. G 02 В 5/01, 1971. 4.Нелинейные корректирующие устройства в системах автоматического управления. Под ред. Ю. И. Топчеева, «Машиностроение, М., 1971, с. 15, 21 (прототип).
Фиг.1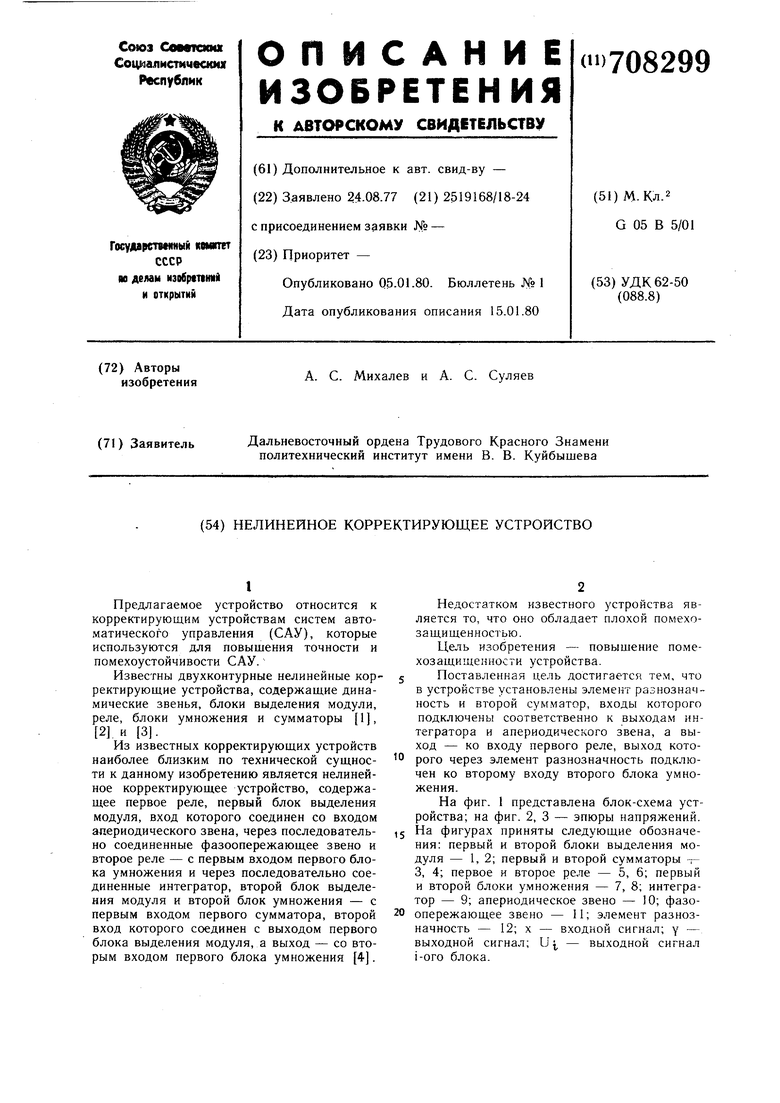
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1978 |
|
SU750421A1 |
| Нелинейное изодромное корректирующее устройство | 1978 |
|
SU767699A1 |
| Псевдолинейное корректирующее устройство | 1979 |
|
SU851332A1 |
| Псевдолинейное корректирующее устройство | 1978 |
|
SU748340A1 |
| Следящая система | 1979 |
|
SU900255A1 |
| Псевдолинейное корректирующее устройство | 1977 |
|
SU628457A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| Следящая система | 1979 |
|
SU862114A1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399017C1 |