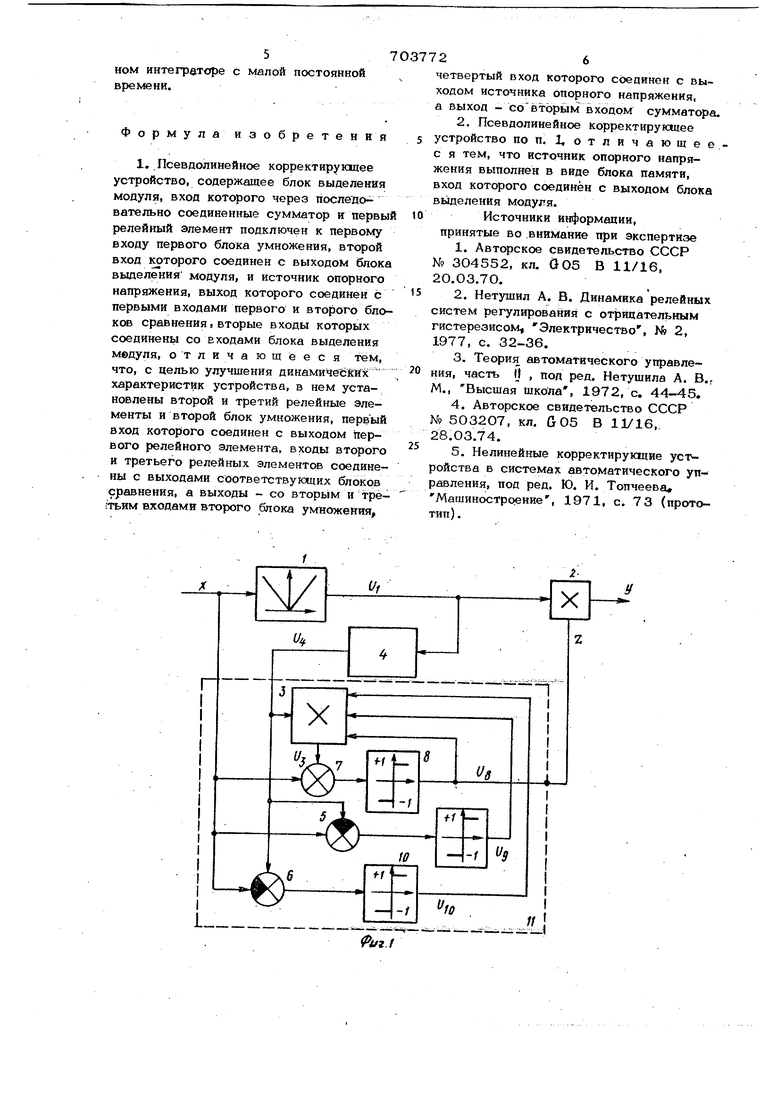
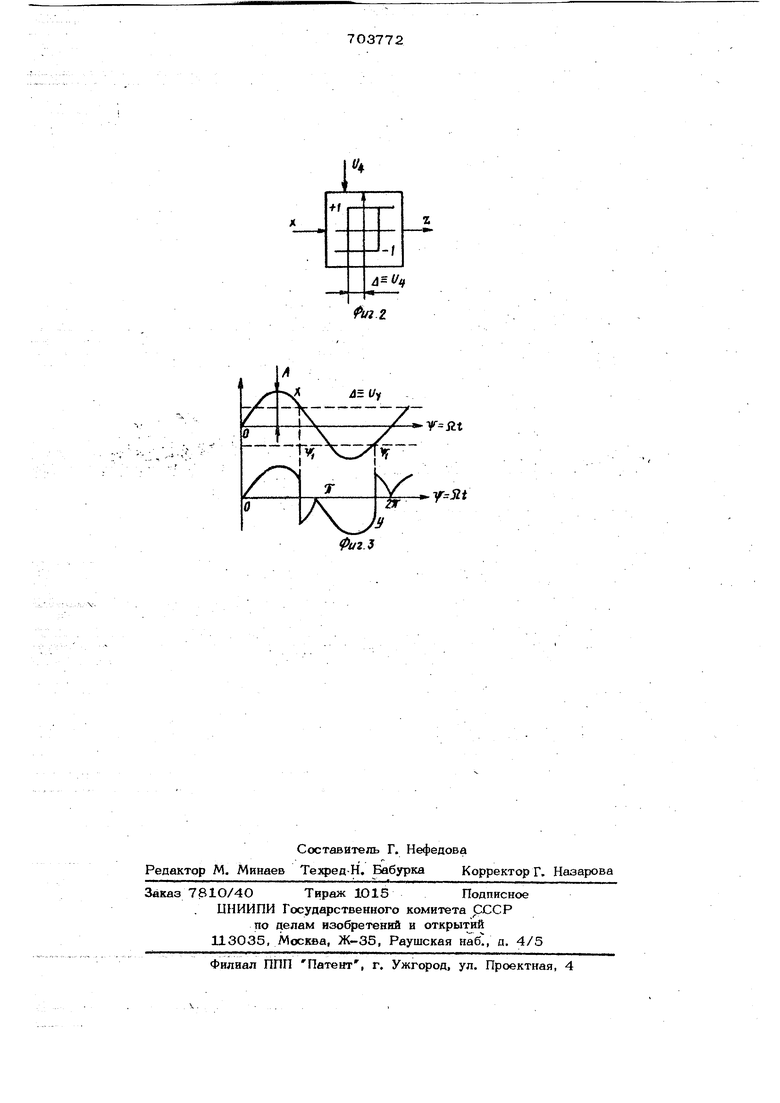
блока памяти, вход которого соединен с выходом блока выделения модуля. Блок-схема устройства представлена на фиг. 1; Э{свивалентная характеристика фазового канала устройства представлена на фиг. 2; эпкры входного и выходного сигналов устройства представлены на фиг. 3, где обозначены блок 1 выделения модуля, первый и второй блоки 2, умножения, источник 4 опорного напряжения, первый и второй блоки 5, 6 срав нения, сумматор 7, первый, второй и тре тий релейные элементы - 8,9, 10, фазовый канал 11 устройства; СС -входной сигнал устройства, у - выходной сигнал устройства, I -выходной сигнал фазового канала 11 устройства, Uf,- выход ной сигнал 1-го функционального бло устройства. Входной сигнал устройства ж поступает на вход блока 1 выделения модуля, выходной сигнал U которого умножаетс в блоке 2 умножения на выходной Сигна фазового канала 11. Функциональные бло ки 3, 5, 6,. 7, 8, 9,, 10, входящие в состав фазового канала, фушшионально образуют относительно входного сигнала К устройства реле с опережающей гистерезисной характеристикой, которая представлена на фиг. 2, где ширина зоны неоднозначности Д пропорциональна величине опорного напряжения U4- Такая результирующая характеристика получена йа счет того, чго знак оп6|рнЬгЬ напряжения U| на выходе блока 3 умножения зависящий от произведения знаков выходных сигналов Ug, Uj, релейных элементов 8, 9, 10 соответственно, положителен при и - 1 ЗЕ д и отрицателен при я: д U-Д Суммирование сформировщного по вышеописанному закону U с сигналом эс на входе релеиного элемента 8 приводит к тому, что зависимость выходного сигнала Z фазового канала 11 от входного сигнала устройства х приобретает вид опережакмцей пет- л гистерезиса. Моменты смены зйака И на первом входе блока 2 умножения определяются шириной зоны неоднозначности результирующей опережающей гистерезисной характеристики фазового канала, 11, т.е. величиной опорного напряжения U, Угол фазового опережения ff (см фиг. 3) будет равен &/А и не зависит от частбТИ входного гармонического сигнала ОС . 7 4 Независимость частотных характерисТИК корректирующего устройства от амплитуды входного сигнала X. достигается за счет того, что опорное напряжение и формируется с помощью источника опорного напряжения в зависимости от сигнала U , поступающего с выхода блока 1 выделения модуля. В результате этого фазовая характеристика устройства имеет вид t «А/А аГ(6/Л/С (где К - коэффициент передачи блока: памяти, который используется в качестве источника опорного напряжения) и не зависит от амплитуды входного сигнала X . Так как обновление информации на выходе источника 4 опорного напряжения происходит каждые полпериода колебаний входного сигнала X. , т.е. каждые тюлпериода меняется ширина зоны неоднозначности Д , то при коррекции систем автоматического управления с помощью предлагаемого корректирующего устройства существенно улучшаются динамические показатели переходных процессов в системе. Использование предлагаемого корректируюгдего устройства в системах автоматического управления помимо улучшения их динамических характеристик позволяет также существенно упростить процедуру синтеза корректирующих устройств и сводит ее лишь к определению необходимого в системе фазового опережения, которое полностью обеспечивается выбором коэффициента передачи R источника 4 опорного напряжения. Поскольку полоса пропускания предлагаемого корректирующего устройства теоретически неограничена, то его применение дает особенно заметный положительный эффект в сисг темах с переменными параметрами/ где использование традиционных корректирукщих устройств подчас неэффективно из-за конечной ширины их полосы пропускания. Техническая реализация устройства не вызывает затруднений, так как релейные элементы 8, 9, 10 и блоки 5, 6, 7 могут быть выполнены, например, на операционных усилителях серии К 140, К153, КИ9 с пассивными суммирующими цепями на их входах, Четырехвходовой блок 3 умножения может быть реализован, например, с помощью логических схем серии К133 сочетании с аналоговым ключом. Источник 4 опорного напряжения может быть выполнен на обнуляемом операционном интеграторе с малой постоянной времени.
Формула изобретения
1. Псевдолинейное корректируквдее устройство, содержащее блок выделения модуля, вход которого через последовательно соединенные сумматор « первый релейный элемент подключен к первому входу первого блока умножения, второй вход которого соединен с выходом блока выделения модуля, и источник опорного напряжения, выход которого соединен с первыми входами первого и второго блоков сравнения, вторые входы которых соединены со входами блока выделения медуля, отличающееся тем, что, с целью улучшения динамических характеристик устройства, в нем установлены второй и третий релейные элементы и второй блок умножения, первый вход которого соединен с выходом первого релейного элемента, входы второго и третьего релейных элементов соединены с выходами соответствукхцих блоков сравнения, а выходы - со вторым и тре;тьим входами второго блока умножения.
четвертый вход которого соединен с выходом источника опорного напряжения, а выход - со вторым входом сумматора.
2. Псевдолинейное корректирующее устройство по п. 1, отличающее, с я тем, что источник опорного напряжения выполнен в виде блока памяти, вход которого соединён с выходом блока вьаделения модуля.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 304552, кл. U05 В 11/16, 20.03.70.
2.Нетушил А. В. Динамика релейных систем регулирования с отрицательным гистерезисом Электричество, № 2, 1977, с. 32-36.
3.Теория автоматического управления, часть tj , под ред. Нетушила А, В.г М., Высщая школа , 1972, с. 44-45,
4.Авторское свидетельство СССР N9 503207, кл. G05 В 11/16,, 28.03.74.
5.Нелинейные корректирующие устройства в системах автоматического управления, под ред. Ю. И. Топчеева Машиностроение, 1971, с. 73 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Псевдолинейное корректирующее устройство | 1979 |
|
SU851332A1 |
| Псевдолинейное корректирующее устройство | 1976 |
|
SU640248A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Бесконтактный следящий привод постоянного тока | 1975 |
|
SU930241A1 |
| Псевдолинейное корректирующее устройство | 1977 |
|
SU628457A1 |
| Псевдолинейное корректирующее устройство | 1984 |
|
SU1193632A1 |
| Следящая система | 1981 |
|
SU968783A2 |
| Самонастраивающаяся следящая система | 1988 |
|
SU1644089A1 |
| Нелинейное корректирующее устройство с фазовым опережением | 1988 |
|
SU1718182A1 |
| Псевдолинейное корректирующее устройство | 1978 |
|
SU750422A1 |
к «ч .™ лТ
Л(/у
г:
-
