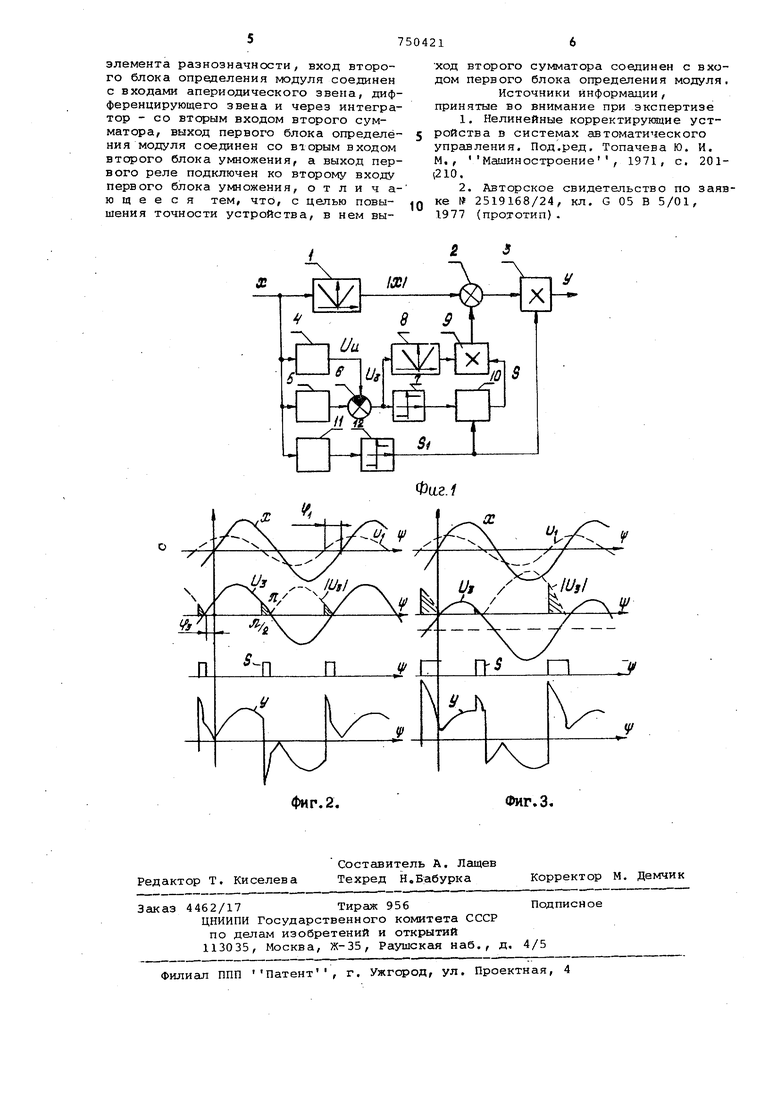
Изобретение относится к нелинейным корректирующим устройствам и может быть использовано для повышения точности систем автоматического управления без ухудшения их устойчивости. Известны псевдолинейные корректирующие устройства, построенные по двухканальной схеме. Вход устройства соединен через блок взятия модуля с первым входом блока умножения и чере последовательно соединенные фаэоопер жающее звено и блок сигнатуры - со вторлм входом блока укиожения,выход которого является выходом устройства 1 , Основным недостатком этих устройств является незначительный коэф фициент передачи по средней составляюмей, Kf как следствие этого, низ кая точность автоматических систем с таким корректирующим устройством при воздействии возмущений, например линейно-изменяющегося сигнала на вхсще система, Наи 5олее близким к предлагаемэму техническим решением является; изодромнов нелинейноеJ корректирующее уст ройство, содержащее интех атоР первый блок определения модуля, последовательное соединейие второго бло- . ка определения модуля, первого сумматора и первого блока умножения, последовательное соединение фазоопережающего звена, первого реле, элемента равнозначности и второго блока умножения, йыход которого соединен с вторым входом первого сумматора, последовательное соединение апериодического звена/ второго сумматора и второго реле, выход которого соединен со вторым входом элемента разнозначности, вход второго блсжа определения модуля соединен с входами апериодического звена, дифференцирующего звена и через интегратор с вторым входом второго сумматора, выходпервого блока определения модуля соединен с вторым входом второго блока умножения, а выход первого реле подключен ко второму входу первого блока умножения 2. Недостатком известного устройства является тшзкая точность, возникающая вследствие включения в амплитудный канал (на первый сумматор) сигнапа интегратора, отстающего по фазе на 90 от входного сигнала. Цель изобретения - повышение точности устройства. Поставленная цель достигается тем что в нелинейном корректирующем устройстве выход второго сумматора соединен с входом первого блока определения модуля. На фиг, 1 изображена схема устройства; на фиг.2 и 3 приведены временные диаграммы сигналов в устройст ве при отсутствии и наличии возмущаю тих воздействий в корректируемой сис теме . Нелинейное корректирующее устройство состоит из второго блока 1 опре деления модуля, первого сумматора 2, первого; блока 3, интегратора 4, апериодического звена 5, второго сумматора б, второго реле 7, первого бло,ка 8 определения модуля, второго бло ка 9 умножения, элемента 10 разнозна ности, фазооперёжающего звена 11, первого реле 12. Устройство работает следующим образом. При- подаче на его вход гармонического сигнала X без средней состав ляющей XQ выходная координата U фазооперёжающего звена 11 опережает X на угол ф., выходные координаты интегратора 4 и апериодического звена 5 отстают от X на углы и ф соот ветственно. Напряжение Uj, на выходе второго сумматора 6 симметрично относительно оси ср и сдвинуто относительно X на положительный угол Ф (фиг. 2). Выходная координата Пд вто рого сумматора б также поступает на вход первого блока определения модуля 8, с выхода которого поступает че рез второй блок умножения 9, выполняющий функции ключевого элемента, на второй вход первого сумматора 2, на первый вход которого поступает (X) с выхода второго блока 1 определения модуля, исходные координаты второго сумматора б и фазоопережающего звена 11 через первое и второе реле 7 и 12 поступают на элемент раз нозначности, вырабатывшощую сигнал S в те промежутки времени, когда несовпадают знаки U и U . Сигнал пос тупает на второй вход второго блока 9 умножения, управляя включением() к сумматору 2, а сигнал S с выхода первого реле 12 поступает на второй, вход первого блока 3 умножения, на первый вход которого подключен сигНсШ с выхода сумматора 2. Итак, при отсутствии возмущений в корректируемой системе, т.е. при X О сигнал S вырабатывается в первые четверти колебаний Х,(из) подключается к сумматору 2 в промежутки существования S и, так как сам сигнал Uj onepexcaeT по фазе X, то включение его к.сумматору 2 в нечетные четверти колебаНИИ оказывает дифференцирующее действие, улучшающее динамические показатели и устойчивость системы, в которой установлено данное корректирующее устройство-. в случае воздействия на систему возмущений в составе X появляется Хд / которая накапливается на интегра-оре 4, что приводит к смещению вниз относительно оси сигнала U, (.З). При этом происходит также изменение длительностей сигнала S так, что выходное выпрямленное напряжение второго сумматора 6 (jUjl) подключается к сумматору 2 только в положительный полупериод X, таким образом, в выходной координате устройства 9 появляется средняя составляющая, компенсирую щая через исполнительный элемент системы сшибку, вызванную возмущением. В корректируемой системе устанавливается такой автоколебательный режим работы, когда продолжительность подключения выходного сигнала второго сумматора б, содерх ащего составляющую, накопленную на интеграторе 4 в сумматор 2 уравновешивает действие возмущения. Средняя составляющая ошибки Х(з становится равной О (см. эпюры фиг, 2). Таким образом, применение предлагаемого нелинейного корректирующего устройства обеспечивает устойчивость свободных движений системы, в которой оно установлено, улучшая динамические показатели и точность ее переходных процессов. Положительные свойства изобретения, заключающиеся в повышении точности устройства, достигнуты без введения новых блоков за счет изменения функциональных связей. Нелинейное корректирующее устройство позволяет эффективно улучшать динамические показатели переходных процессов в системах автоматического управления, а также повышать их точность путем исключения средней ошибки в режимах воздействия линейно-изменяющегося входного сигнала и моментного внешнего возмущения. Формула, изобретения Нелинейное корректирующее устройство содержащее интегратор, первый блок определения модуля, последовательно соединенные второй блок опре-. деления модуля, первый сумматсф и первый блок у1«шожения, последовательно соединенные фазоопережающее звено, первое реле, элемент разнозначности и второй блок умножения, выход которого соединен со вторым входом первого сумматора, последовательно соединенные апериодическое звено, второй сумматор и второе реле,,выход которого соединен со вторым входом
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1977 |
|
SU708299A1 |
| Нелинейное изодромное корректирующее устройство | 1978 |
|
SU767699A1 |
| Псевдолинейное корректирующее устройство | 1978 |
|
SU748340A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Псевдолинейное корректирующее устройство | 1977 |
|
SU628457A1 |
| Фильтр низших частот для подавления резонанса контура регулирования параметра прокатки | 1983 |
|
SU1135510A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
| Псевдолинейное корректирующее устройство | 1979 |
|
SU851332A1 |
| Нелинейное корректирующееуСТРОйСТВО | 1979 |
|
SU840790A1 |
