1, . . .,, Изобретение относится к элементам систем автоматического управления (САУ) , а именно к корректирующим устройствам, применяемым для повышения их точности, и может быть использовано также для увеличения устойчивости корректируемых систем. Известно иэодромное устройство, содержащее интегратор, вход -которого соединен со входом устройства, и сумматор, первый вход которого под ключен ко входу устройства, на второй вход подключен выход интегра тора, а выход сумматора является вы ходом устройства 1. Однако эти линейные устройства о ладают отрицательными фазочастотным характеристиками и потому ухудшают динамические показатели систем, в которых установлены. Наиболее близким техническим решением к изобретению является изодромное нелинейное корректирующее устройство содержащее последователь но соединенные первый блок определе ния модуля, первый сумматор и первы блок умножения, вход первого блока определения модуля через последовательно соединенные интегратор, второй блок определения модуля и блок умножения соединен со вторым входом первого сумматора, через последовательно соединенные фазоопережающее звено и первое реле со вторым входом первого блока умножения, через последовательно соединенные апериодическое звейо, второй сумматор, второе реле, Ьервый элемент НЕРАВНОЗНАЧНОСТЬ и элемент И - со вторым входом второго блока умножения, а выход интегратора связан со вторым входом второго сумматора 2. , , Основной недостаток данного устройства в том, что оно обладает плохими фазочастотными характеристиками, т.е. характеристики лежат р ртотрицательной области (из-за отрицательного фазовйго сдвига на угол выходной координаты интегратора),что уменьшает точность его коррекции. Цель изобретения - устранение отмеченного недостатка, т.е. получение у устройства фазовых характеристик, лежащи-х в положительной области, что увеличивает точность коррекции. Цель изобретения достигается тем, что нелинейное йзодромное корректирующее устройство содержит последовательно соединенные третье реле, второй элемент НЕРАВНОЗНАЧНОСТЬ, выход
которого соединен со вторым входом элемента И, второй вход - с выходом первого реле, а первый вход второго сумматора - со входом третьего реле.
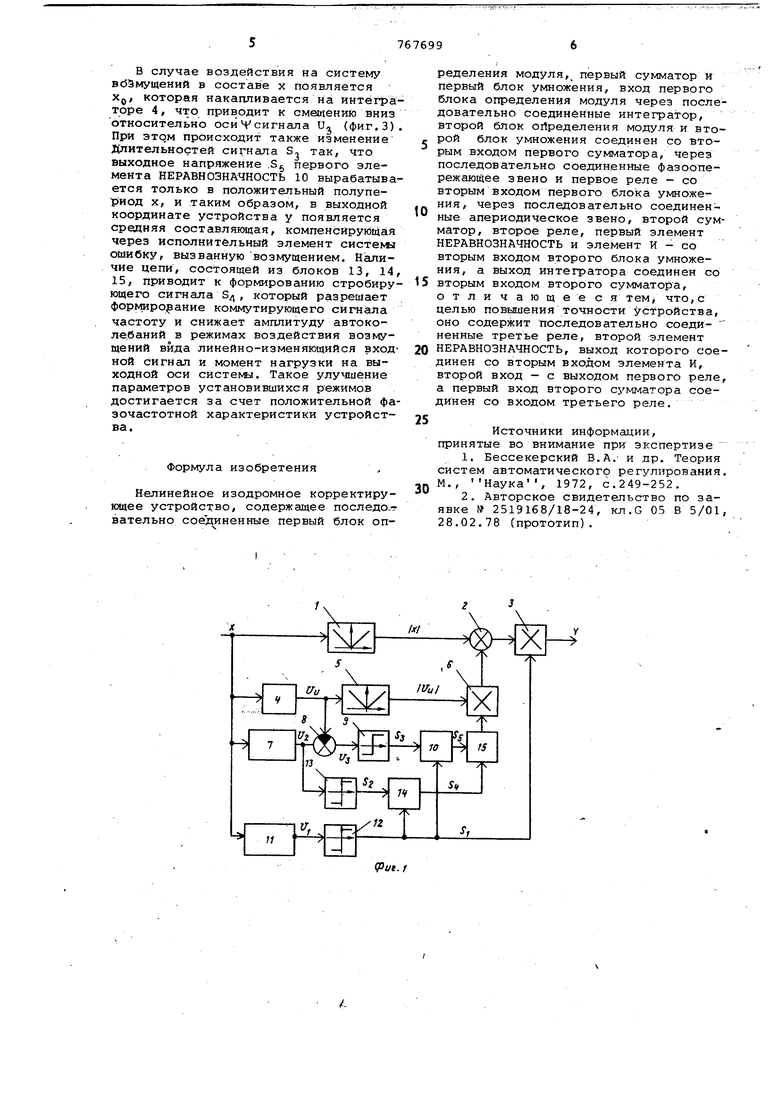
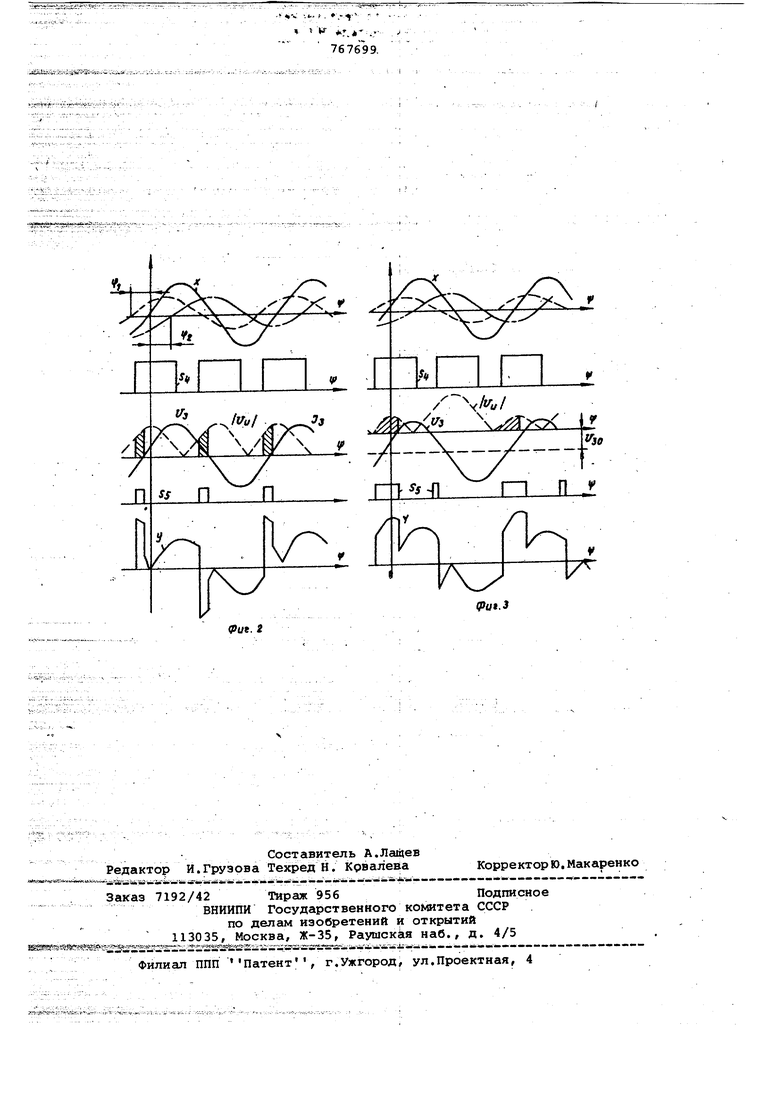
Схема устройства изображена на фиг.1, а на фиг,2, фиг.З приведены временные диаграмг и сигналов в устjpoflCTBe при отсутствии (фиг,2) и на личия возмущающих воздействий (фиг.З) в корректируемой системе.
Йелинейное изодромное корректирующее устройство состоит из трех каналов: амплитудного, фазового и канала Нелинейной фазоопережающей деформации выходного напряжения интеграто-ра, К входу устройства подключены следующие последовательные соединения блоков: первый блок 1 определения модуля, первый сумматор 2 и первый блок 3 умножения, интегратор 4, второй блок 5 определения модуля и второй блок6 умножения, апериодическое звено 7, второй сумматор 8, второе реле 9, выход которого подключен к одному входу первого элемента НЕРАВНОЗНАЧНОСТЬ 10, выход которого соединен со вторым входом второго блока 6 умножения, выход которого подключен ко второму входу сумматора 2; фазоопережающее звено 11, первое реле 12, выход которого подключен ко вторым входам первого элемента НЕРАВНОЗНАЧНОСТЬ 10 и первого блока 3 умножег ия. Выход интегратора 4 соединен с вычитающим входом второго сумматора, а выходом устройства является выход первого блока 3 умножения 3, К выходу апериодического звена 7 подключены последовательно соединенные третье реле 13, второй элемент НЕРАВНОЗНАЧНОСТЬ 14 и элемент И 15, выход которого соединен с вторым входом второго блока 6 умножения. На второйо вход второго.элемента 14 подключен выход первого реле 12.
Устройство работает следующим образом,
При подаче на его вход гармонического сигнала х без средней составляющей XQ выходная координата U фазоопе режающего звена 11 опережает х на уголЧ , выходные координаты интегратора 4 и апериодического звена 7 отстают от Xна углы7Г/2и% соответственно.
Напряжение ,на выходе .второго сумматора из симметрично относительно оси Н и сдвинуто относительно х на положительный угол (фиг.2). Выходная координата интегратора также поступает на вход второго блока Ь оТпрёД ёлёйй я мО дул я, вкход а котОро го поступает через второй блок 6 умножения, выполняющий функции ключевого элемента, на второй вход первог6 суйматора 2, на первый вход котоого поступает /х/ с выхода первого блока 1 определения модуля. Выходные коордйнаты второго сумматора « и фазоопережающего звена 11 через реле 9,
12 поступают на первый элемент 10, вырабатывающий сигнал S, в те промежутки времени, когда не совпадают знаки и , Сигнал S и Sj первого реле 12 и третьего реле 13, подключенного к выходу апериодического звена 7, поступают на второй элемент НЕРАВНОЗНАЧНОСТЬ 14, который вырабатывает выходной сигнал S в промежутки времени, когда полярности его входных сигналов различны. Сигнал вырабатывается в- нечетные четверти Колебаний х и поступают на первый 5 только в нечетные четверти колебаний X, исключая включени-- сигнала интегратора в сумматор 2 в конце полупериода х импульсами Sc (фиг.З), В системе устанавливается такой автоколебательный режим работы,когда продолжительность подключения выходного сигнала интегратора 4 в амплитуДный канал (в сумматор 2) уравновешивает действие возмущения. Средняя составляющая ошибка х„ становится равной О (фиг.2).
Таким образом, применение нелинейного изодромного устройства не только обеспечивает устойчивость свободных Движений корректируемой системы и улучшает динамическое показатели ее переходных процессов, но и повышает вход элемента И 15, на второй вход которого поступает сигнал У5 выхода первого элемента НЕРАВНОЗНАЧНОСТЬ 10, Выходной сигнал S элемента И 15 вырабатывается лишь тогда, когда совпадают его входные сигналы S, Sc, и поступает на второй вход второго блока 6 умножения, управляя включением /Uj, / в первый сумматор 2, а сигнал S выхода первого реле поступает на второй вход первого блока умножения 3, на первый вход которого подключен сигнал с выхода сумматора 2.
Итак, при отсутствии возмущений в корректируемой системе, т.е. при 5 , сигнал S вырабатывазтся в первые четверти колебаний х, /и„/ подключается в амплитудный канал в промежутки существования S и несмотря на отрицательный фазовый сдвиг U относительно X оказывает фазоопережающее действие на выходную координату у устройства. Поэтому несмотря на то, что в корректирующем устройстве уста,нр;влен интегратор,, обеспечивающий точность работы корректируемой системы в режимах вынужденных движений, предлагаемое техническое решение одновременно улучшает динамические пока атели переходного процесса, улучшает устойчивость корректируемой системы..Поскольку сигнал S формируется в данном случае в нечетные четверти колебаний х, то наличие второго элемента НЕРАВНОЗНАЧНОСТЬ никак не сказывается на работе корректирующего устройства.
В случае воздействия на систему вбЭмущений в составе х появляется Xjj, которая накапливается на интётратрре 4, что приводит к смешению вниз относительно осиУсигнала Uj (фиг.З). При этдм происходит также изменение Длительностей сигнала S так, что выходное напряжение .3 первого элемента НЕРАВНОЗНАЧНОСТЬ 10 вырабатывается только в положительный полупериод X, и таким образом, в выходной координате устройства у появляется средняя составляющая, компенсйру1б14ая через исполнительный элемент системл ошибку, вызванную возмущением. Наличие цепи, состоящей из блоков 13, 14, 15, приводит к формированию стробирующего сигнала S , который разрешает формирование коммутирующего сигнала частоту и снижает амплитуду автоколебаний в режимах воздействия возмущений вида линейно-изменяющийся входной сигнал и момент нагрузки на выходной оси систег и. Такое улучшение параметров установившихся режимов достигается за счет положительной фазочастотной характеристики устройства.
Формула изобретения
Нелинейное изодромное корректирующее устройство, содержащее последо.-г вательно соединенные первый блок определения модуля, первый сумматор и первый блок умножения, вход первого блока определения модуля через последовательно соединенные интегратор, второй блок ойределения модуля и второй блок умножения соединен со вторым входом первого сумматора, через последовательно соединенные фазоопережаюгДее звено и первое реле - со вторым входом первого блока умножения, через последовательно соединенные апериодическое звено, второй сумматор, второе реле, первый элемент НЕРАВНОЗНАЧНОСТЬ и элемент И - со вторым входом второго блока умножения, а выход интегратора соединен со
5 вторым входом второго сумматора, отли чающее с я тем что,с целью повышения точности устройства, оно содержит последовательно соеди- ненные третье реле, второй элемент
0 НЕРАВНОЗНАЧНОСТЬ, выход которого Соединен со вторым входом элемента И, второй вход - с выходом первого реле, а первый вход второго сумматора соединен со входом третьего реле.
25
Источники информации, принятые во внимание при экспертизе
1,Вессекерский В.А.- и др. Теория систем автоматического регулирования. М., Наука, 1972, с.249-252.
30
2.Авторское свидетельство по заявке № 2519168/18-24, кл.С 05 В 5/01, 28.02.78 (прототип).
х . 1. . -., ... .
v .:.-.....
:iiЙite siS йd;й« 55 г-. 767699.
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1978 |
|
SU750421A1 |
| Нелинейное корректирующее устройство | 1977 |
|
SU708299A1 |
| Псевдолинейное корректирующее устройство | 1978 |
|
SU748340A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| Псевдолинейное корректирующее устройство | 1979 |
|
SU851332A1 |
| Псевдолинейное корректирующее устройство | 1977 |
|
SU628457A1 |
| Устройство для коррекции электрогидравлических систем нагружения | 1982 |
|
SU1059540A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1977 |
|
SU742872A1 |
| ГИРОКОМПАСНАЯ СИСТЕМА ОРИЕНТАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2012 |
|
RU2498216C1 |
.-/
