Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам управления мостовыми кранами, и может быть использовано при перемещении небольших штучных грузов.
Известно устройство управления мостовым краном, содержапдее подвесной пульт управления 1.
Известно также устройство управления MOCTOBbiM краном, содержащее подвесной пульт управления, связанный с приводом механизма подъема крановой тележки, и командоаппарат, смонтированный на раме и связанный с контакторами направления приводов механизмов передвижения крана и крановой тележки 2.
Недостатком известных устройств является неудобство в эксплуатации при перемещении небольших штучных грузов.
Цель изобретения - повышение удобства эксплуатации при перемещении небольших штучных грузов.
Для этого в предлагаемом устройстве .рама укреплена на крановой тележке, а командоаппарат снабжен двумя парами, датчиков, планками с рычагами, пружинами и двумя парами расположенных взаимно параллельно в горизонтальной плоскости роликов, датчики каждой пары установлены в зоне перемещения соответствующей планки, связанной с рь1чагом посредством пружины, ролики каждой пары укреплены на соответствуюц ей планке и рычаге, которые шарнирно соединены с рамой, при этом ролики одной пары ориентированы параллельно продольной оси крановой тележки, а ролики другой пары - перпендикулярно к
этой оси.
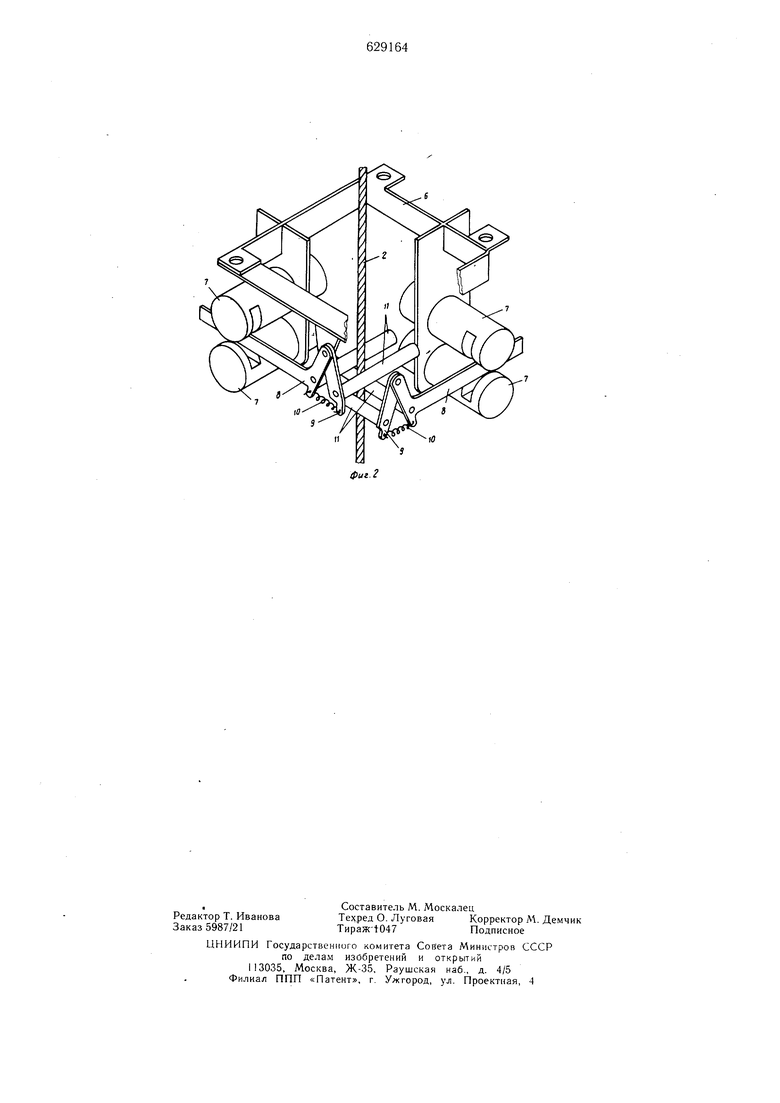
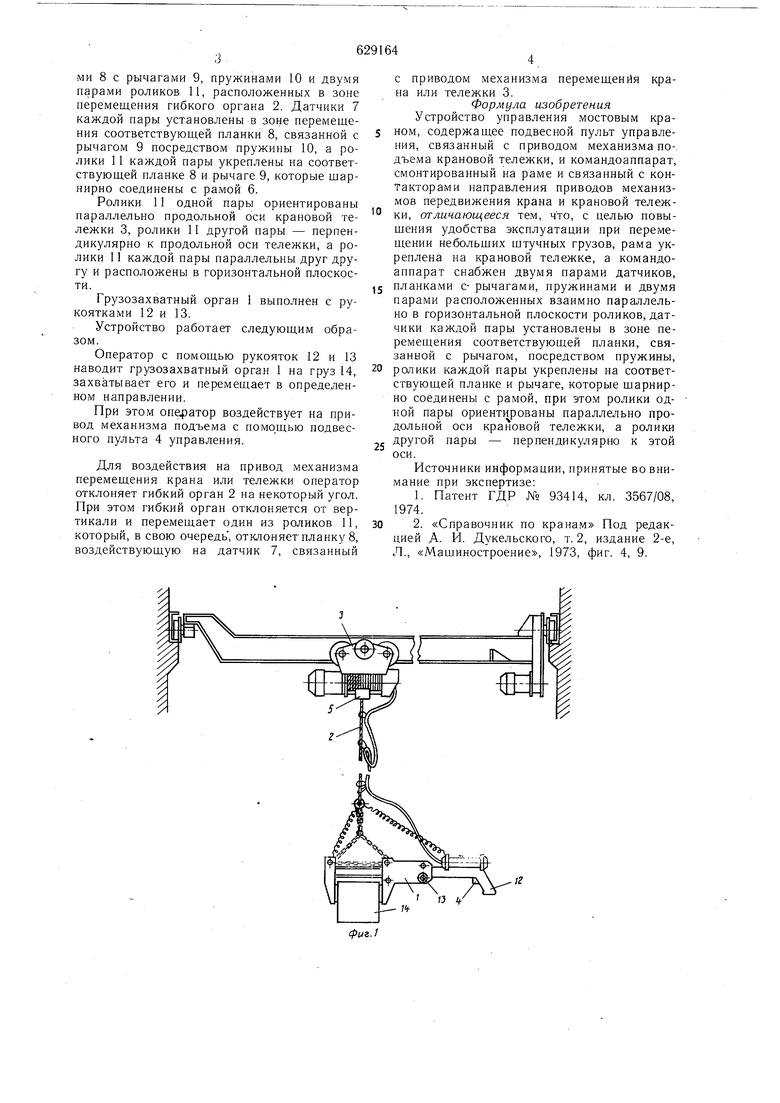
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - командоаппарат устройства, общий вид.
Устройство управления мостовым краном содержит горизонтальный грузозахватный орган 1, соединенный гибким органом 2 с крановой тележкой 3, подвесной пульт 4 управления, связанный с приводом механиз.ма подъема крановой тележки (на чертеже не показан).
0 Командоаппарат 5 смонтирован на раме 6, укрепленной на тележке 3, и сБяза.н с контактора.ми направления приводов механизмов передвижения крана и тележки (на чертеже не показаны). Командоаппарат
25 снабжен двумя парами датчиков 7, планками 8 с рычагами 9, пружинами 10 и двумя парами роликов 11, расположенных в зоне перемещения гибкого органа 2. Датчики 7 каждой пары установлены в зоне перемещения соответствующей планки 8, связанной с рычагом 9 посредством пружины 10, а ролики 11 каждой пары укреплены на соответствующей планке 8 и рычаге 9, которые щарнирно соединены с рамой 6.
Ролики 11 одной пары ориентированы параллельно продольной оси крановой тележки 3, ролики 11 другой пары - перпендикулярно к продольной оси тележки, а ролики 11 каждой пары параллельны друг другу и расположены в горизонтальной плоскости.
Грузозахватный орган 1 выполнен с рукоятками 12 и 13.
Устройство работает следующим образом.
Оператор с помощью рукояток 12 и 13 наводит грузозахватный орган 1 на груз 14, захватывает его и перемещает в определенном направлении.
При этом опе,ратор воздействует на привод механизма подъема с подвесного пульта 4 управления.
Для воздействия на привод механизма перемещения крана или тележки оператор отклоняет гибкий орган 2 на некоторый угол. При этом гибкий орган отклоняется от вертикали и перемещает один из роликов 11, который, в свою очередь , отклоняетпланку 8, воздействующую на датчик 7, связанный
с приводом механизма перемещения крана или тележки 3.
Формула изобретения Устройство управления мостовым краном, содержащее подвесной пульт управления, связанный с приводом механизма по-, дъема крановой тележки, и командоаппарат, смонтированный на раме и связанный с контакторами направления приводов механизмов передвижения крана и крановой тележки, отличающееся тем, что, с целью повыщения удобства эксплуатации при перемещении небольщих щтучных грузов, рама укреплена на крановой тележке, а командоаппарат снабжен двумя парами датчиков,
планками с- рычагами, пружинами и двумя парами расположенных взаимно параллельно в горизонтальной плоскости роликов, датчики каждой пары установлены в зоне перемещения соответствующей планки, связанной с рычагом, посредством пружины,
ролики каждой пары укреплены на соответствующей планке и рычаге, которые шарнирно соединены с рамой, при этом ролики одной пары ориентированы параллельно продольной оси крановой тележки, а ролики другой пары - перпендикулярно к этой оси.
Источники информации, принятые во внимание при экспертизе:
1. Патент ГДР № 93414, кл. 3567/08, 1974.
0 2. «Справочник по кранам Под редакцией А. И. Дукельского, т. 2, издание 2-е, Л., «Машиностроение, 1973, фиг. 4, 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОСТОВОЙ КРАН-ШТАБЕЛЕР | 1997 |
|
RU2191150C2 |
| Подвесная люлька | 1980 |
|
SU887430A1 |
| МОСТОВОЙ КРАН | 2010 |
|
RU2492134C1 |
| Тренажер мостового крана | 1980 |
|
SU1037322A1 |
| Подвесной многоопорный мостовой кран | 1948 |
|
SU83105A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| МОСТОВОЙ РОЛИКООПОРНЫЙ КРАН МАМЫРИНА ДЛЯ КОНТЕЙНЕРНЫХ ПЛОЩАДОК И СЕЛЬСКОХОЗЯЙСТВЕННЫХ АГРОПЛАНТАЦИЙ | 1992 |
|
RU2020122C1 |
| Мостовой кран | 2023 |
|
RU2820482C1 |
| КРАНОВАЯ ТЕЛЕЖКА | 2015 |
|
RU2672309C1 |
| Способ определения координат мостового крана | 2021 |
|
RU2767796C1 |