Изобретение относится к машиностроению и, в частности к подъемно-транспортному машиностроению.
Изобретение относится также к внутризаводскому транспорту и складам.
Широко известны и повсеместно применяются на складах различного назначения краны-штабелеры, предназначенные для укладки в стеллажи пакетированных или штучных грузов, являющиеся наиболее эффективным оборудованием для механизации складской переработки грузов. Среди различных типов кранов-штабелеров большую группу составляют мостовые краны-штабелеры, представляющие собой мост, по которому перемещается тележка, оборудованная полноповоротной колонной с подъемным грузозахватным механизмом.
Краны-штабелеры наиболее полно описаны в кн.: А.И.Зерцалов, Б.И.Певзнер, И.И.Бененсон. "Краны-штабелеры". Москва, "Машиностроение", 1986 г.
Мостовые краны-штабелеры по способу управления делятся на два типа: управляемые оператором с пола и из подъемной кабины.
Наиболее простыми, надежными и эффективными являются мостовые краны-штабелеры, управляемые с пола. Благодаря отсутствию кабин для их использования на складах требуются узкие проходы между стеллажами, достаточные для перемещения колонны с вилочным захватом. Благодаря этому площадь складов используется на 30-50% лучше, чем при применении мостовых кранов-штабелеров, управляемых из кабины, где межстеллажные проходы выполняются значительно шире из-за необходимости перемещения колонны с кабиной оператора.
Ближайшим аналогом, наиболее близким к настоящему изобретению является мостовой кран-штабелер ОП-1,0, изготавливающийся во ГОСТ 16553-88. Кран-штабелер состоит из моста, по которому перемещается тележка, оборудованная полноповоротной колонной, по которой с помощью привода подъема вертикально перемещается вилочный захват.
Недостатком существующих мостовых кранов-штабелеров, управляемых с пола, является ограниченная высота подъема, которая не превышает 5,2 м. Ограничение высоты подъема вызвано тем обстоятельством, что оператор, находясь в узком проходе, не может увидеть уровень расположения ячеек стеллажей, находящихся на высоте более 5,2 м. Поэтому мостовые краны-штабелеры, управляемые с пола, применяются на складах, высота которых не более 7,2 м. При большой высоте складов применяются мостовые краны-штабелеры, управляемые из кабины.
Техническим результатом заявленного изобретения является повышение удобства эксплуатации мостового крана-штабелера при обслуживании высоких стеллажей.
Указанный технический результат достигается тем, что в мостовом кране-штабелере, управляемом с пола оператором посредством подвесного пульта и содержащим мост, установленную на последнем тележку, к поворотному кругу которой прикреплена колонна, и перемещающийся по колонне с помощью канатного или цепного привода грузоподъемник, представляющий собой каретку с вилами для захвата груза, привод подъема грузоподъемника снабжен датчиком числа оборотов привода подъема, установленным на быстроходном валу редуктора упомянутого привода и измеряющим в каждый момент времени число оборотов, которое электронным преобразователем, включающим в себя микропроцессор и световое цифровое табло, преобразуется в цифровой код, указывающий высоту подъема вил захвата, причем упомянутое табло установлено на подвесном пульте.
Кран-штабелер управляется оператором с помощью подвесного пульта управления. Оператор, держа в руках подвесной пульт, движется за краном-штабелером, включая на пульте необходимые для работы приводы.
В целях устранения недостатка, присущего существующим мостовым кранам-штабелерам, управляемым оператором с пола, а именно малой высоты подъема, ограниченной невозможностью оператора визуально направлять кран-штабелер в ячейки, расположенные выше 5,2 м, предлагаемый в настоящем изобретении кран-штабелер оборудован устройствами, позволяющими оператору направлять груз в ячейки, расположенные практически на любой высоте.
Для этого на приводе подъема, на быстроходном валу редуктора, установлен датчик числа оборотов, с помощью которого в каждый момент времени определено точное положение вил грузоподъемника по высоте, поскольку канатный барабан имеет постоянный диаметр нарезки и каждый оборот электродвигателя (с учетом редукции) определяет высоту перемещения крана-штабелера. Число оборотов электродвигателя, определенное датчиком с помощью электронного преобразователя, включающего микропроцессор и цифровое табло, преобразуется в цифровой код, измеряющий в процессе работы высоту подъема вил грузоподъемника.
Цифровое табло установлено на подвесном пульте управления и в каждый момент времени указывает высоту подъема вилочных захватов относительно уровня пола.
Оператор крана-штабелера, зная высоту расположения верхних ячеек стеллажей склада, производит установку (или взятие) груза, сверяясь с высотой подъема вил, высвечиваемой на пульте.
На фиг.1 приведен мостовой кран-штабелер на складе. Вид спереди.
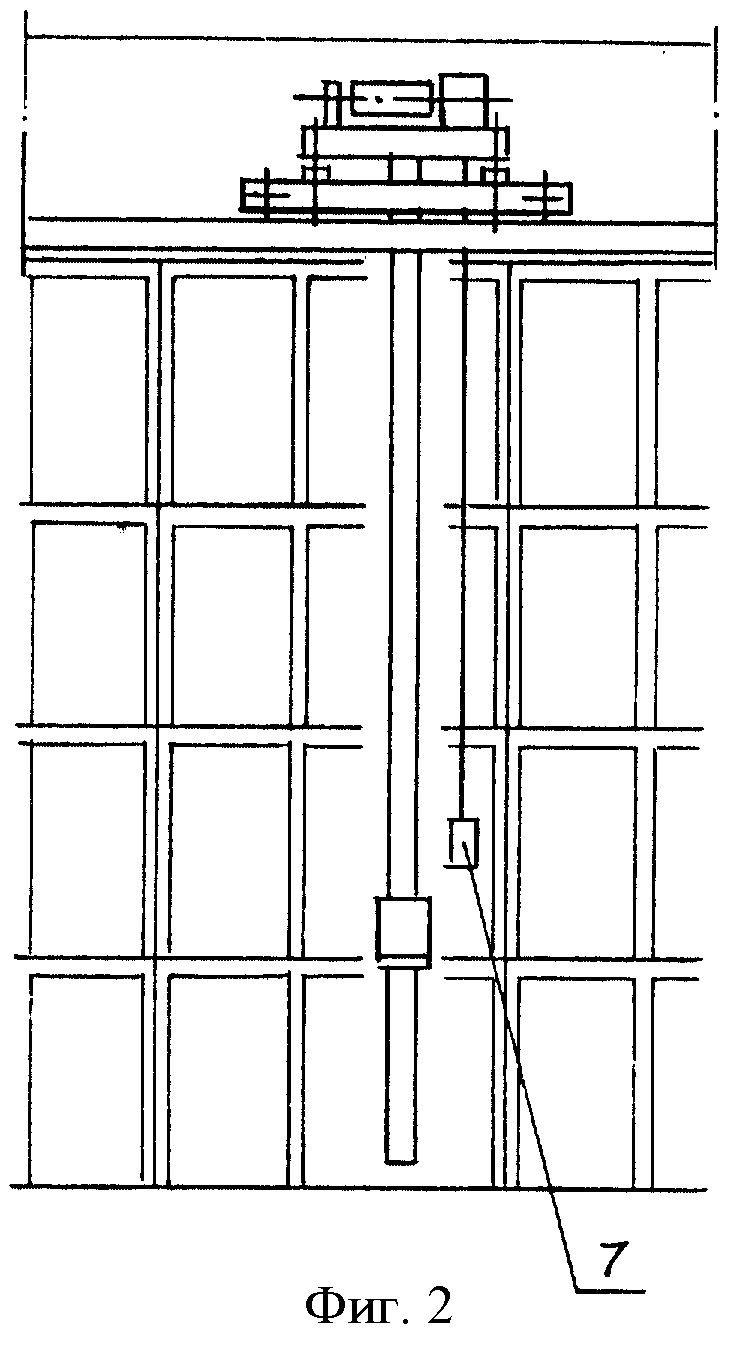
На фиг.2 - мостовой кран-штабелер на складе. Вид сбоку.
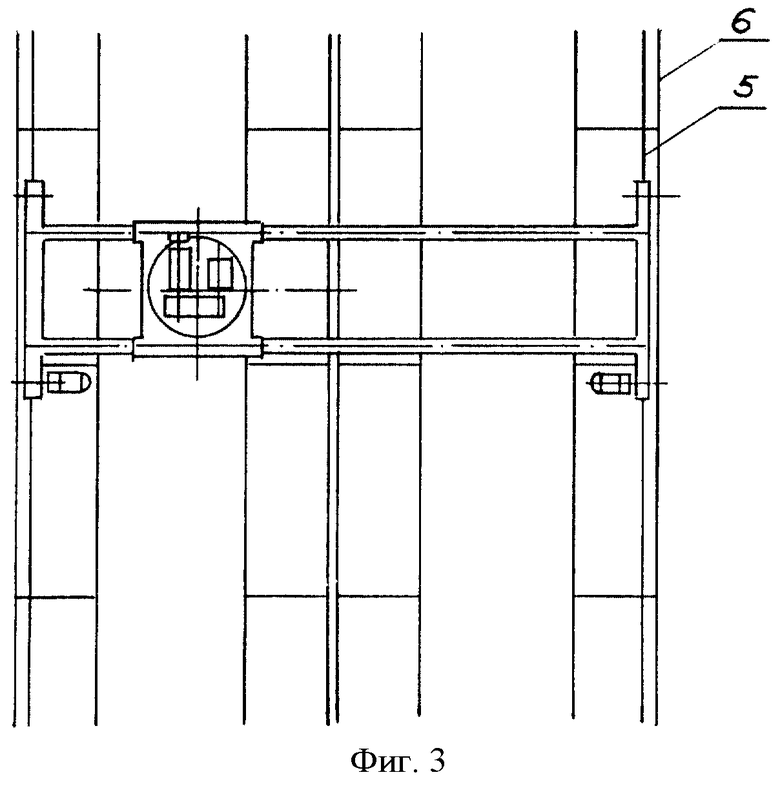
На фиг. 3 - мостовой кран-штабелер на складе. Вид сверху.
На фиг. 4 - тележка крана-штабелера.
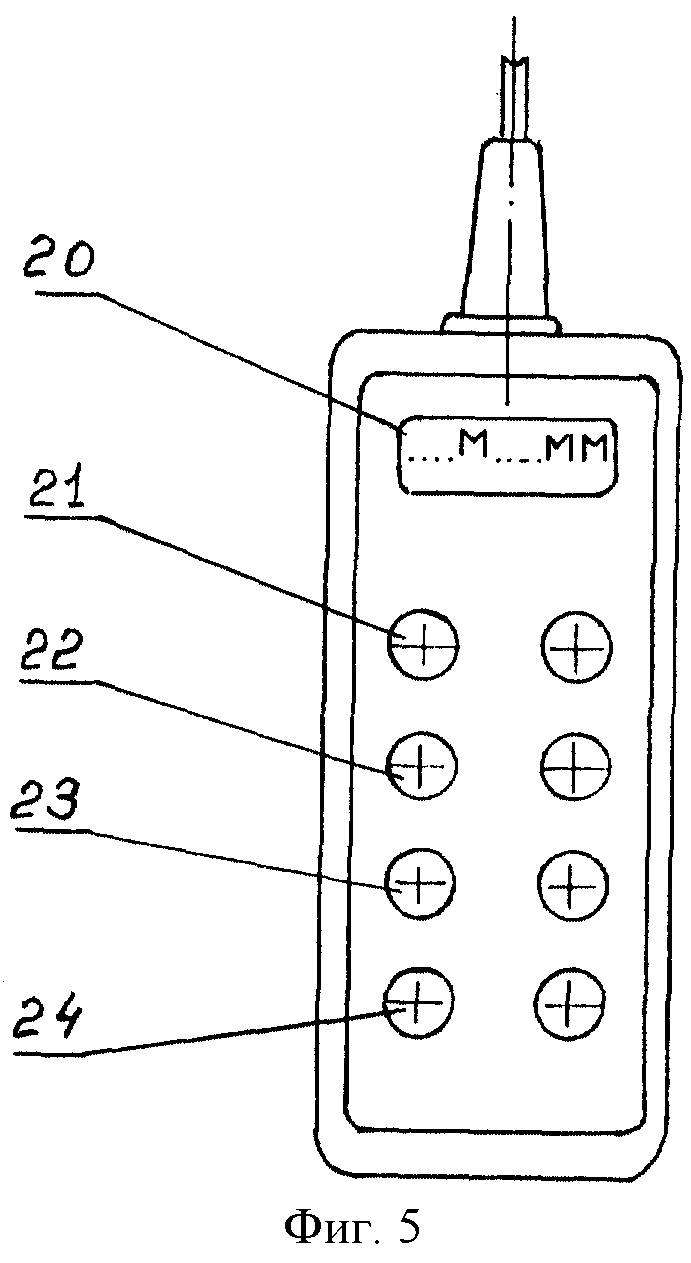
На фиг. 5 - подвесной пульт крана-штабелера.
Мостовой кран-штабелер (см. фиг. 1...3) имеет мост 1, выполненный из двутавровых балок, соединенных между собой концевыми балками, оснащенными ходовыми колесами и двумя раздельными приводами, установленными на ходовых колесах.
По мосту с помощью ходовых колес перемещается тележка 2, выполненная в виде рамы, на которой установлен поворотный круг со смонтированным на нем приводом подъема.
К поворотному кругу тележки крепится колонна 3 коробчатого сечения, имеющая направляющие для перемещения грузоподъемника. Колонна вращается на поворотном круге с помощью специального привода.
По колонне перемещается грузоподъемник 4, представляющий собой каретку с двумя парами катков, охватывающих колонну. На каретке установлены две вилы, служащие для захвата груза.
Кран-штабелер перемещается по крановым путям 5, установленным на стеллажах 6.
Управление краном-штабелером производится оператором с помощью подвесного пульта 7, подвешенного к неповоротной части тележки.
Тележка (см. фиг. 4) имеет прямоугольную раму 8, на которой с помощью шариковой поворотной опоры установлен поворотный круг 9, на котором смонтированы привод подъема груза и привод поворота колонны. Привод подъема состоит из канатного барабана 10, установленного на выходном валу цилиндрического редуктора 11. Привод осуществляется от двухскоростного электродвигателя 12, на валу которого установлен колодочный тормоз 13. Тележка перемещается по балкам моста на ходовых колесах 14, два из которых, соединенные общим валом, являются приводными. На валу одного из колес установлен привод передвижения 15, состоящий из электродвигателя со встроенным тормозом и редуктора.
Вращение поворотного круга вместе с колонной производится с помощью привода, состоящего из редуктора 16, на выходном валу которого смонтирована шестерня, находящаяся в зацеплении с внутренним зубчатым венцом поворотной опоры (на чертеже показаны осевыми линиями), тормоза 17 и электродвигателя 18.
На быстроходном валу редуктора привода подъема установлен датчик числа оборотов 19, служащий для управления работой крана-штабелера. С помощью датчика числа оборотов в каждый момент времени измеряется число оборотов канатного барабана, которое с помощью электронного преобразователя, включающего микропроцессор и цифровое табло (установленное на пульте управления), преобразуется в цифровой код, измеряющий в процессе работы высоту подъема вил грузоподъемника.
Управление краном-штабелером производится с помощью подвесного пульта (см. фиг.5). На пульте установлено цифровое табло 20, на котором высвечивается высота подъема вил грузоподъемника, а также установлены четыре пары кнопок для управления приводами: моста 21, тележки 22, подъема 23 и поворота 24.
Работа крана-штабелера производится следующим образом. Груз, подлежащий укладке в стеллаж для хранения, доставляется на склад каким-либо транспортным средством (автомобилем, автопогрузчиком, конвейером и т.д.). Оператор мостового крана-штабелера с помощью подвесного пульта управления подводит кран-штабелер к транспортному средству и снимает груз. Далее оператор направляет кран-штабелер в один из межстеллажных проходов путем попеременного включения приводов тележки, моста и поворота. Въехав в межстеллажный проход, оператор путем попеременного (или одновременного) включения приводов моста и подъема устанавливает вилы против заданной свободной ячейки в стеллаже. Если ячейка расположена на высоте до 5 м, оператор ориентируется визуально, без помощи светового табло. Если ячейка расположена на большой высоте, то оператор пользуется световым табло, на котором, по мере движения грузоподъемника, высвечивается высота подъема вил. Зная высоту расположения ячеек, оператор останавливает подъем грузоподъемника на требуемой высоте. Если требуется установить груз в ячейку, то вилы останавливаются на 30...50 мм выше полки стеллажа. Остановив привод подъема, оператор, путем включения привода тележки, вводит груз в ячейку, а затем, пользуясь указанием светового табло, опускает вилы на 30...50 мм ниже полки стеллажа. При этом груз ложится на полки стеллажа, а вилы освобождаются и выводятся из стеллажа путем включения привода тележки. Мостовой кран-штабелер готов к выполнению следующего цикла. Таким же образом, но в обратном порядке, производится взятие груза из стеллажа с тем отличием, что для взятия груза вилы поднимаются ниже уровня полки требуемой ячейки и после заезда внутрь ячейки поднимаются уже с грузом на 30...50 мм выше полки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ СТЕЛЛАЖЕЙ | 1990 |
|
RU2017676C1 |
| КРАН-ШТАБЕЛЕР,Ф011ДЗ.;:.о^йа| | 1973 |
|
SU390002A1 |
| БИБЛИОТЕКА | | 1971 |
|
SU302308A1 |
| СТЕЛЛАЖНЫЙ КРАН-ШТАБЕЛЕР^'Сс..СОЮЗНАЯ |||Л]:Н:нО-г-;.Х(:;Г;Я-ШЯ^' ^ ЬИБЛИО"ЕКА I | 1973 |
|
SU368154A1 |
| Кран-штабелер для двустороннего обслуживания многоярусных стеллажей | 1976 |
|
SU570533A1 |
| Кран-штабелор | 1966 |
|
SU992342A1 |
| Стеллажный комплектовочный кранштабелер | 1977 |
|
SU623791A1 |
| ПОДВЕСНОЕ ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 1992 |
|
RU2076841C1 |
| Кран-штабелер | 1968 |
|
SU718342A2 |
| Кран-штабелер | 1982 |
|
SU1055696A1 |

Изобретение относится к области подъемно-транспортного машиностроения. Мостовой кран-штабелер, управляемый с пола оператором посредством подвесного пульта, содержит мост, установленную на последнем тележку, к поворотному кругу которой прикреплена колонна, и перемещающийся по колонне с помощью канатного или цепного привода грузоподъемник, представляющий собой каретку с вилами для захвата груза. Привод подъема грузоподъемника снабжен датчиком числа оборотов привода подъема, установленным на быстроходном валу редуктора упомянутого привода и измеряющим в каждый момент времени число оборотов, которое электронным преобразователем, включающим в себя микропроцессор и световое цифровое табло, преобразуется в цифровой код, указывающий высоту подъема вил захвата. Упомянутое табло установлено на подвесном пульте. Изобретение обеспечивает повышение удобства в эксплуатации. 5 ил.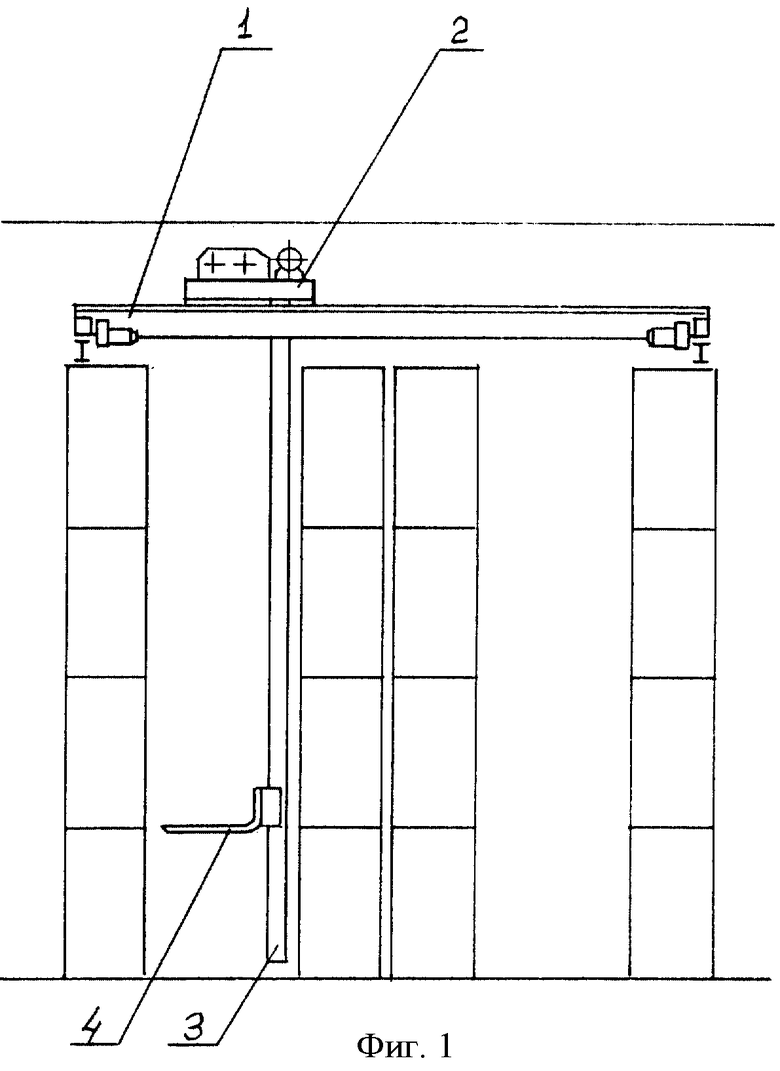
Мостовой кран-штабелер, управляемый с пола оператором посредством подвесного пульта и содержащий мост, установленную на последнем тележку, к поворотному кругу которой прикреплена колонна, и перемещающийся по колонне с помощью канатного или цепного привода грузоподъемник, представляющий собой каретку с вилами для захвата груза, отличающийся тем, что привод подъема грузоподъемника снабжен датчиком числа оборотов привода подъема, установленным на быстроходном валу редуктора упомянутого привода и измеряющим в каждый момент времени число оборотов, которое электронным преобразователем, включающим в себя микропроцессор и световое цифровое табло, преобразуется в цифровой код, указывающий высоту подъема вил захвата, причем упомянутое табло установлено на подвесном пульте.
| ЗЕРЦАЛОВ А.И., ПЕВЗНЕР Б.И | |||
| Краны-штабелеры | |||
| - М.: Машиностроение, 1974, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| US 5011358 А, 30.04.1991 | |||
| US 4387436 А, 07.06.1983 | |||
| RU 94036242 A1, 20.08.1996. | |||

