Обычно для осуществления заднего хода винтовых судов применяют реверсивный двигатель, или реверсивную муфту, или же -винты с поворотными лопастями. При первом приёме снижается коэфидиент полезного действия, при -усложняется передача и при третьем - винтовая система.
Предлагаемое устройство обеспечивает осуществление заднего хода, винтовых судов при применении нереверсивного двигателя и без применения реверсивных Муфт и винтов с поворотными лопастями. Достигается это применением иаправляющего аппарата, устанавливаемого позади винта, для изменения направления В01дян0го потока и создания этим потоком реактивного давления на стенки аппарата в н.алравлени1И, обратном направлению переднего хода судна.
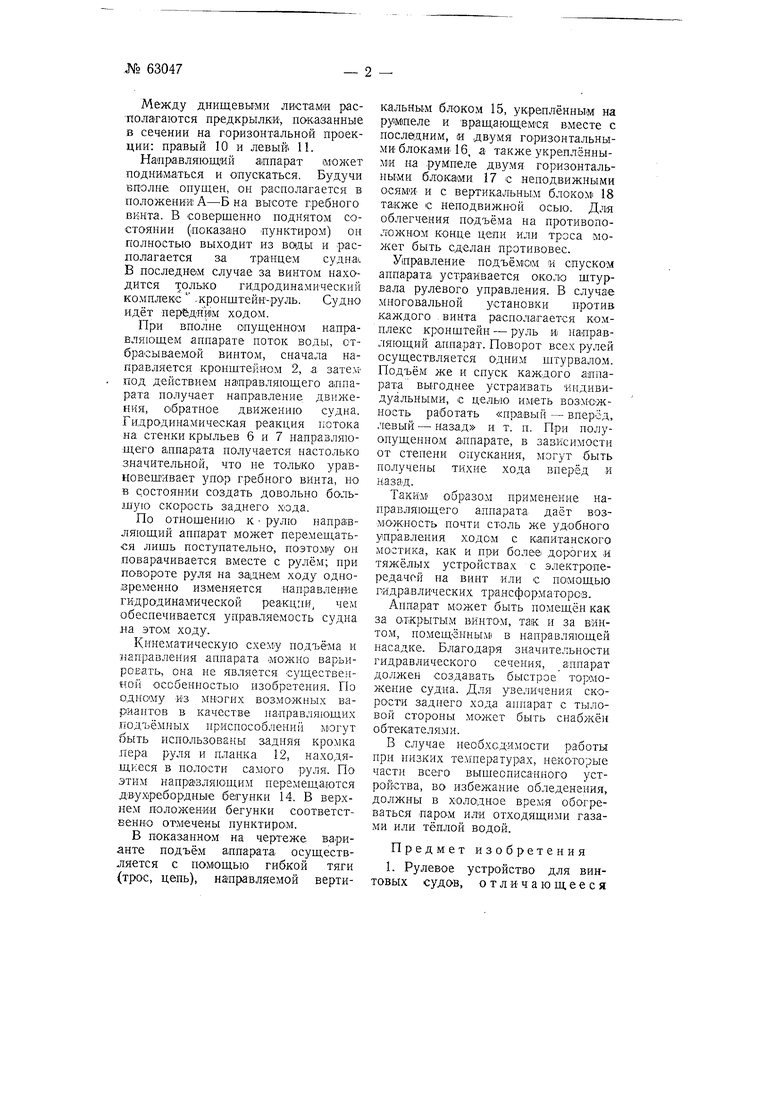
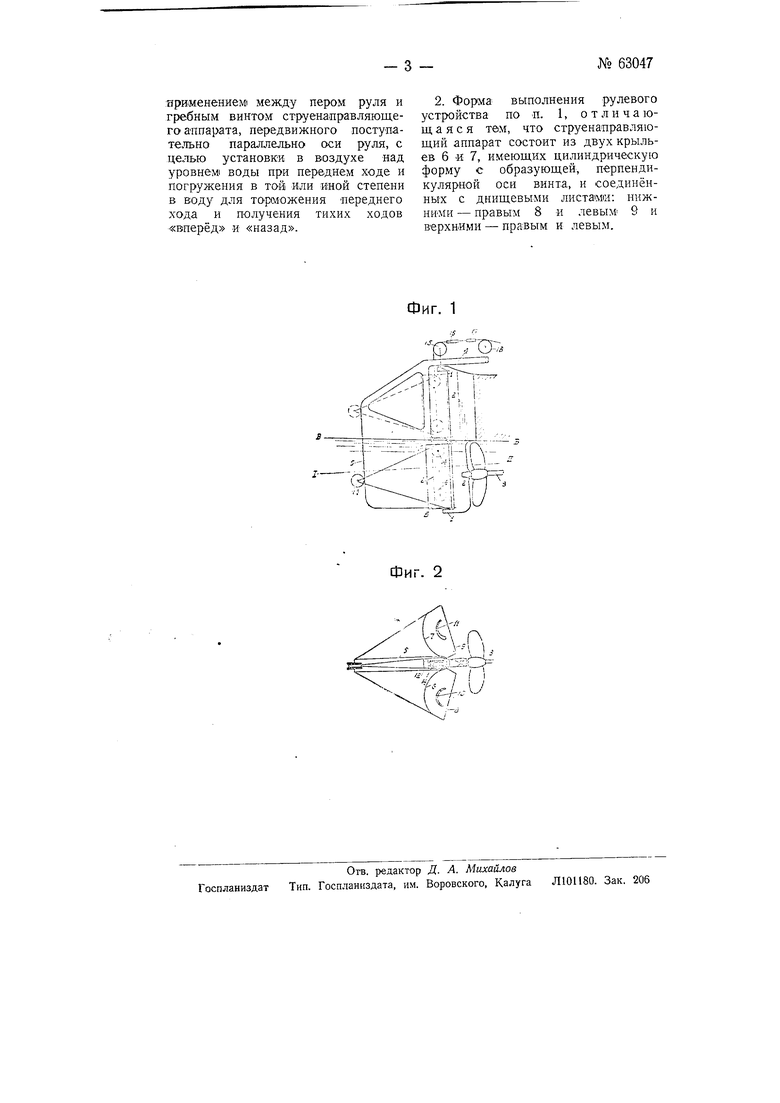
На чертеже фиг. 1 изображает боковой вид устройства, фиг. 2 - разрез того же устройства по I-II на фиг. 1.
Руль 5 поддерживается двумя пальцами 1, вращающимися в соответствующих опорах кронщтейна 2. Тот же кронщтейн несёт конпевой подщипник гребного вала 3. Поворот руля осуществляется с помощью румпеля 4. В нижней, погружённой в воду, части кронштейну может быть придана форма, соответствующая вращению потока за винтом. nepoMi руля 5 и кронштейном имеется зазор минимальной величины. Вышеописанное сочетание руля и кронштейна имеет целью свести до минимума сопротивление выступающих частей при переднем ходе.
Ось вращения руля располагается перпендикулярно оси гребного вала, которая для удобства вычерчивания расположена на чертеже параллельно нижней линии его отреза, поэтому ватерлиния В-В расположена наклонно.
В зазоре между кронщтейном 2 и рулём 5 может перемещаться возвратно-поступательно, параллельно оси пальцев 1 руля, струенаправляющиГг аппарат. Его ycTpoiicTBOнаиболее наглядно впдни из горнзонтально; прсекцин, представляющей разрез по I-I на фиг. 1. Основными частями направляющего аппарата являются два крыла 6 и 7, имеющие цилиндрическую форму с образующей, периендикулярно11 оси винта. Крылья соединены с днищевьми листами: нижними 8нЭ и с такими же верхними.
Между днищевьгми листами располагаются предкрылки, показанные в сечении на горизонтальной проекции: правый 10 и левый 11.
Направляющий аппарат может подниматься и опускаться. Будучи вполне опущен, он располагается в положении; А-Б на высоте гребного вйнта. В соверщенно поднятом состоянии (показано пунктиром) он полностью выходит из В01ДЫ и располагается за транпем судна. В последнем случае за винтом находится только гидродинамический комплекс .кронщтей«-руль. Судно идёт передним ходом.
При вполне спущенном направляющем аппарате поток воды, отбрасываемой винтом, сначала направляется кронщтейном 2, а зателг под действием направляющего аппарата получает направление движения, обратное движению судна. Гидродинамическая реакция потока на стенки крыльев 6 и 7 направляющего аппарата получается настолько значительной, что не только уравновешивает упор гребного винта, но в с.остоянии создать довольно большую скорость заднего х-эда.
По отнощению к рулю направляющий аппарат может перемещаться лишь поступательно, поэтому он поварачивается вместе с рулём; при повороте руля на заднем ходу одновременно изменяется направление гидродинамической реакции, чем обеспечивается управляемость судна на этом ходу.
Кинематическую схему подъёма и направления аппарата можно варьировать, она не является существенной особенностью изобретения. По одному -ИЗ многих возможных вариантов в качестве направляющих подъёмных нрНспособлений могут быть использованы задняя кромка пера руля и планка 12, находящиеся в полости самого руля. По этим направляющим перемещаются двух1ребордные бегунки 14. В верхнем положении бегунки соответственно отмечены пунктиро.
В показанном на чертеже варианте подъём аппарата осуществляется с помощью гибкой тяги (трос, цепь), направляемой вертикальным блоком 15, укреплённым на рум1пеле и вращающемся вместе с последним, и двумя горизонтальнымиблоками 16, а также укреплённыМ)И па румпеле двумя горизоптальньши блоками 17 с неподвижными ОСЯМ и с вертикальпы м блоком 18 также с неподвижной осью. Для облегчения подъёма на противоположном конце цепи или троса может быть сделан противовес.
Управление подъёмом и спуско-м аппарата устраивается около щтурвала рулевого управления. В случае многовальной установки против каждого , винта располагается комплекс кронщтейн - руль ш направляющий аппарат. Поворот всех рулей осуществляется одним щтурвалом. Подъём же и спуск каждого аппарата выгоднее устраивать индивидуальными, с целью иметь возм-ожность работать «правый - вперёд, левый - назад п т. п. При полуопущенном аппарате, в зависимости от степени опускания, могут быть получены тихие хода вперёд и назад.
ТлкИМ образо.м применение направляющего аппарата даёт возможпость почти столь же удобного управления ходом с капитанского мОСтика, как и при более дорогих и тяжёлых устройствах с электропередачей на винт или с помощью гидравлических трансформаторов.
Аппарат может быть помещён как за открытым винтом, так п за винтом, помещённым в направляющей насадке. Благодаря значительности гидравлического сечения, аппарат должен создавать быстрое торможение судна. Для увеличения скорости заднего хода аппарат с тыловой стороны может быть снабжён обтекателями.
В случае необходимости работы при низких температурах, некоторые части всего выщеописанного устройства, во избежание обледенения, должны в холодное время обогреваться паром или отходящими газами или тёплой водой.
Предмет изобретения
1. Рулевое устройство для винтовых судов, отличающееся
ярименением между пером руля и гребным винтом струенаправляющего аппарата, передвижного поступательно параллельно оси руля, с целью установки в воздухе над уровнем воды при переднем ходе и погружения в той или ияой степени в воду для тор(можения переднего хода и получения тихих ходов «вперёд и «назад.
2. Форма выполнения рулевого устройства по п. 1, отличающаяся тем, что струенаправляющий аппарат состоит из двух крыльев 6 И 7, имеющих цилиндрическую форму с образующей, перпендикулярной оси винта, и соединённых с днищевыми листами: нижними - правым 8 и левым 9 и верхними - правым и левым.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВЕРСИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ЗАДНЕГО ХОДА У ВИНТОВЫХ СУДОВ | 1944 |
|
SU69683A1 |
| Гребное колесо для судов | 1932 |
|
SU41369A1 |
| Приспособление для улучшения работы гребного лопастного винта | 1932 |
|
SU36208A1 |
| Реверсивно-рулевое устройство водометного движителя | 1983 |
|
SU1111945A1 |
| Реверсивный редуктор для гребных винтов | 1946 |
|
SU70053A1 |
| Судно, составленное из отдельных шарнирно связанных между собой секций | 1936 |
|
SU50618A1 |
| Судно | 1933 |
|
SU43817A1 |
| ЧАСТИЧНО ПОГРУЖЕННЫЙ ДИСКОВЫЙ ДВИЖИТЕЛЬ В РУЛЕВОЙ НАПРАВЛЯЮЩЕЙ НАСАДКЕ | 2022 |
|
RU2777848C1 |
| РЕВЕРСИВНО-РУЛЕВОЕ УСТРОЙСТВО | 2021 |
|
RU2763067C1 |
| Способ движения на "водной подушке" и глиссирующее судно для его осуществления | 2015 |
|
RU2615031C2 |
Фиг. 2
