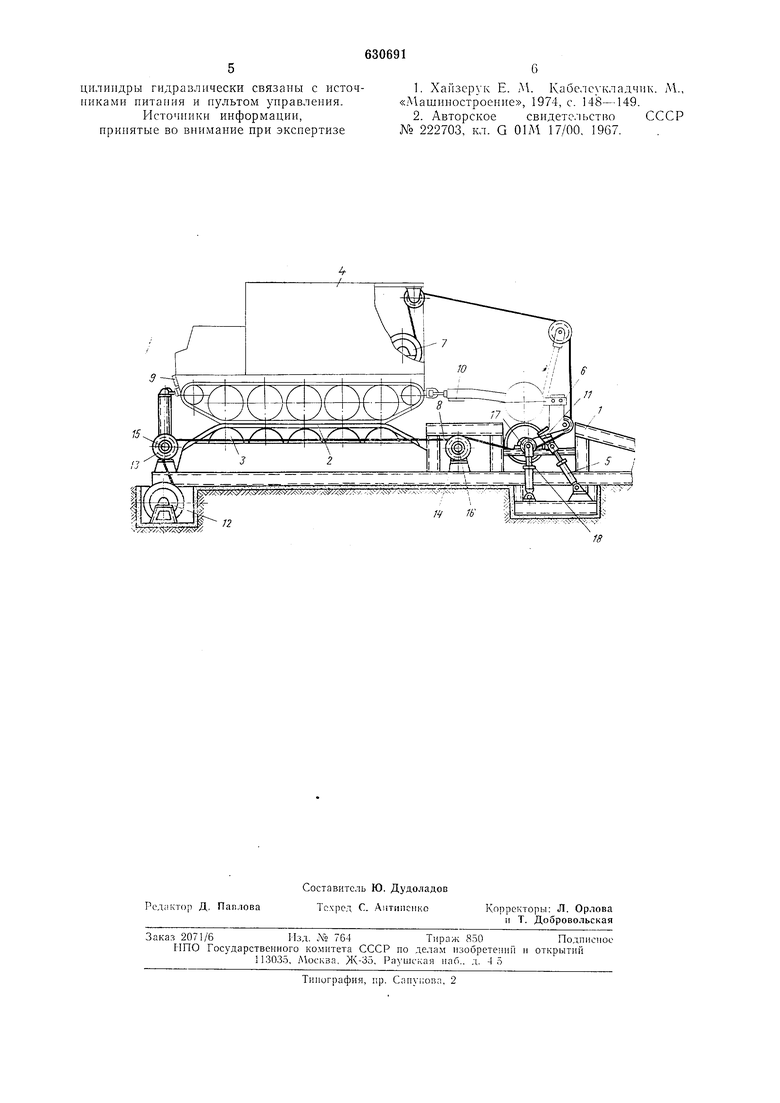
На чертеже изображен етеид, общий вид.
Стеид д.1я иепытания землеройиой машины е прицепным рабочим органом включает раму 1, на которой размещены опорные бееконечные ленты 2 с тормозными барабанными регуляторами 3 сонротнвлення их движению, на которые устанавливаетея тягач 4 землеройной машины, силовой цилиидр 5, соединяемый с нриценным рабочим органом 6 машины для регхлировання сопротивления перемещению этого рабочего органа, нсточники ннтания и иульт уиравления (не показаны), гидравлически связанные с регуляторами 3 и силовым нилипдром 5.
На кабелеизвлекающей машине 4 имеются лебедка 7 с кабельным барабаном н датчики слежения за положением размещеиного под машнной кабеля 8: датчики 9 и 10 реагируют на отклонение соответственно курсов тягача 4 и нрицепиого рабочего органа 6 от положения кабеля 8 в горизоптальной нлоскости, а датчик И, размещенный на носке рабочего органа, реагирует па изменение глубины залегания кабеля.
Для размотки кабеля под нагрузкой и измеиеиия его положения в плане и вертикальной нлоскости на раме 1 перед машиной установлена лебедка 12 с доиолните.чьным барабанным регулятором соиротивления размотке кабеля 8 и три расположенных в вертикальной плоскости ролика, при этом ролики 13 и 14 устаиовлены на концах штоков 15 и 16 поперечно расположенных, а ролик 17 - на ко1ще штока 18 вертикально расположенного дополннтельных силовых ц 1линдров. Кабель 8 нроведен 1между лебедками 7 и 12 через ролики 13, 14 и Г/. Дополните-тьный барабанный регулятор на лебедке 12 и дополнительные силовые цилиндры со штоками 15, 16 и 18 гидравлически связаны с теми же источниками питания и пультом управлепия, что и регуляторы 3 и силовой цилиндр 5.
Работает стенд следующим образом.
Включают систему геиератора «Нитание извлекаемого кабеля, размешенную на машине, что приводит к появлению в кабеле переменного электрического тока и возникновению вокруг иего магнитного поля. Посvle этого включают ходовую систему тягача и лебедку 7 кабелеизвлекающей землеройной машины и одновременно с этим включают с пульта унравления стеидом тормозные барабанные регуляторы 3 опорных бесконечных лепт и лебедки 12, а также силовые цилиндры. При этом тормозные барабанные регуляторы 3 создают нагрузку на ходовую систему тягача, тормозной регулятор лебедки 12 обеспечивает натяжение кабеля 8, силовой цилиндр 5 создает сонротивленне неремещению рабочего оргаиа 6, а силовые цилиндры со штоками 15, 16 и 18 обеспечивают изменение ноложения кабеля 8 иод кабелеизвлекающей машнной в нлане
и вертикальной нлоскости. Величины тормозных моментов и усилий сопротивления фиксируются нриборами пульта управления стендом и регулируются с иего. На перемещения кабеля датчики 9, 10 и И, установленные на машине, реагируют воспроизведением сигналов. Когда датчики 9 и 10 пернендикуляриы оси кабеля и находятся с ним в одной плоскости, то наводимая в них ЭДС (сигпа:г) минима.тьна или равиа нулю. Нрн горнзонтальном неремещении кабеля относительно датчиков 9 и 10 происходит увеличение величины ЭДС, а при переходе кабеля через нулевое иоложеиие (когда датчики нернендикуляриы оси кабеля) ЭДС, наводимая в датчиках, меияет евой знак. Величииа ЭДС, наводимая в датчике 11, зависит от расстояния центра датчика до кабеля, а фаза его неизменна.
Сигналы от датчиков носледовател1лю ностунают во входное устройство, блок управления, фазовый детектор и полупроводниковые реле, где происходит усиление сигпалов, преобразование их но амплитуде,
нреобразование неременных нанряжений сигналов в ностояниые с учетом полярности (знака) и повторное усиление. Затем иреобразованные н усиленные снгналы постунают па исполнительные органы мехаиизмов наведения, которые унравляют механизмами испытываемой машины, осуществляющими повороты тягача, повороты дышла рабочего органа 6, а также подъем и заглубление ножа этого рабочего органа.
Формула изобретен и я
Стенд для иснытания землеройной машины с нрицепиым рабочим органом, включающий раму, на которой раз.мещены опорные бесконечные ленты с тормозными барабанными регуляторами сонротнв.тения их движению, соединяемый с рабочим органом силовой цилиндр для регулирования сонротивления перемещению рабочего органа, источннки питания и пульт уиравления, гидравлически связанные с регуляторами и цилиндром, о т л и ч а ю щ н и с я тем, что, с целью обеспечения возможиости испытания
системы автоматического управления кабелеизвлекаюше землеройной машины, нмеющей лебедку с кабельным барабаном и датчики за по.тожсиием размещенного под машиной кабеля, на раме перед маш1Н10й установ.тена лебедка с дополнительным барабанным регулятором сопротивления размотке кабеля н трн расположенных в вертнкальной н.тоскости ролика для проводки кабеля между лебедками, при
этом два ролика установлены на когщах штоков ноперечпо расположенных п один - вертнкально расположепного дополннтельных силовых цилиидров для изменения угла наклона кабеля в илане п вертикальной
нлоскостн, а дополннтельпые регулятор и
цилиндры гидравлически связаиы с источииками питания и пультом управления.
Источники информации, принятые во внимание при экспертизе
1.Хайзерук Е. А. Кабелеукладчнк. М, «Машиностроение, 1974, с. 148-149.
2.Авторское свидетельство СССР № 222703, кл. G 01М 17/00, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для извлечения кабеля из грунта | 1974 |
|
SU641571A1 |
| Кабелеизвлекающая машина | 1983 |
|
SU1143809A1 |
| Кабелеукладчик | 1983 |
|
SU1229280A1 |
| Гидропривод машины для извлечения кабеля из грунта | 1980 |
|
SU866078A1 |
| Кабелеизвлекающая машина | 1984 |
|
SU1187232A1 |
| МАШИНА ДЛЯ БЕСТРАНШЕЙНОЙ ПРОКЛАДКИ ПОДЗЕМНЫХ КОММУНИКАЦИЙ | 1972 |
|
SU346455A1 |
| Землеройная машина | 1976 |
|
SU608888A1 |
| Бульдозер-путепрокладчик | 1982 |
|
SU1020524A1 |
| ВСЕСОЮЗНАЯ f штт-^тттщ | 1973 |
|
SU386070A1 |
| Транспортное средство для подземных горных выработок | 1985 |
|
SU1273608A1 |
