1
Изобретение относится к области автоматического уиравления электромеханическими преобразователями и может быть использоваио в ирецизионны.х установках и станках, в частности в нолупроводниковом производстве и машиностроении.
По основному авт. св. N° 439891 известно устройство для управления шаговым электродвигателем, содержаш,ее усилитель мош,иости, связанный с раснределнтелем имиульсов через схемы совиадения, и узел запираиия, подключенный своим выходом ко входам схем совпадения п состоящий из генератора имиульсов, счетчика импульсов и дополнительиой схемы совнадения, один вход которой подключен к выходу генератора имиульсов, другой - к выходу старшего разряда счетчика, а выход соединен со счетным входом счетчика, связанного своим входом установки нулевого состояния со входом расиределителя импульсов.
Узел запирания отключает питапие обмоток двигателя через определенпое время, необходимое для успокоения ротора, после прекраш,ения подачи управляюш,их импульсов.
Недостаток такого устройства ири использовании его для перемеш,ения объекта, подвергающегося воздействию рабочего органа, наиример инструмента, заключается
в том, что при обесгочеипых обмотках двигателя усилия, возникающие вследствие вибрации или ускорений, передаются на ротор двигателя и вызывают поворот последнего, что приводит к потере точностн позиционирования; в-Л1есте с тем среднее время воздействия ииструмеита обычно меньше средией продолжительност паузы между командами.
Целью нзобретеиня является новьпиение надежности при позиционпрованпп приводимого электродвигате.юм объекта, подвергающегося воздействиям рабочего органа.
Указаииая цель достигается тем. что устройство доиолннте. содержит датчик ноложения рабочего органа и двухвходовой элемент НЛП, выход которого нодк.чю ICH ко входам схем совнадеиня, а входы - соответственно к выходам узла запирания и датчика ноложення рабочего органа.
Такое выиолнеине }стрО1 1Ства обеепечивает возбужденне электродвнгателя и)н воздействии иа нриводимый им в движение объект рабочего органа, наиример обрабатывающего инструмента, что нсключает нотерю ииформации электродвигателем прн вибрациях, и ускорениях, вызываемых воздействием 1И1струмеита.
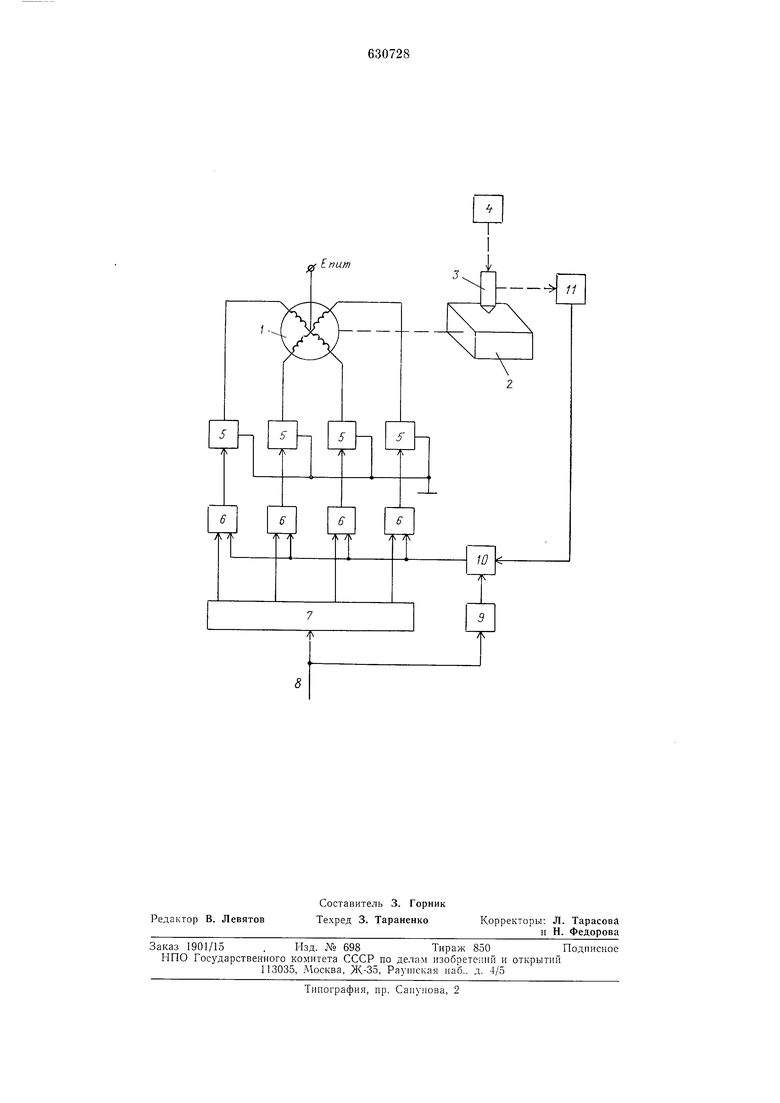
На чертеже иредставлена структурная схема иредлагаемого устройства.
Шаговый электродвигатель 1 еоедииен парой ходовой винт-гайка с объектом 2 и смужит для прецизионного нозиционирования поеледнего. Рабочий орган, например инструмент 3, ириводится в движение при помощи нривода 4. Шаговый электродвигатель 1 через усилители 5 и ехемы 6 совпадения, количеетво которых определяется числом фаз двигате.тя, подключен к выходу распределителя 7 импульсов. Вход 8 управляющих импульсов распределителя соединен со входом узла 9 запирания, выход которого подключен к одному из входов элемента 10 ИЛИ. Выход элемента 10 ИЛИ соединен со вторыми входами схем 6 совпадения, а второй вход - е выходом положения датчика 11 инструмента, нредставляюгцего собой в данном случае фотодатчик, оптически связанный с инструментом 3.
Устройство работает следующим образом. В исходном состоянии отсутствуют импульсы па входе 8 и сигнал на выходе датчика 11, обмотки двигателя 1 обесточены. При поетуплении управляющих импульсов на вход 8 па выходе узла 9 запирания ноявляется сигиал, поэтому сигналы с распределителя 7 проходят через схемы 6 на уенлители 5, нодключающие в определенной последовательности обмотки двигателя 1 к источнику нитания, вызывая вращение ротора и перемещение объекта 2 в следующую позицию. Иосле прекращения подачи нравляющих импульсов через некоторое время, необходимое для уенокоения ротора двигателя, сигнал на выходе узла 9 занираиия исчезает, схемы 6 еовпадения запираютея, обмотки двигателя 1 обесточиваются. При перемещении инструмента 3 в рабочее положение, когда усилие от него нри касании обрабатываемого объекта передаетея через последний на ротор двигателя, на выходе датчика 11 инструмента появляется снгнал, нроходящий через элемент 10 ИЛИ на входы схем 6 совпадеиия и пропускающий на усилители 5 сигналы с оиределепных выходов распределителя 7. Вследствие этого соответствующие обмотки двигателя 1 подключаются к источнику питания, и ротор фиксируется. При выходе инструмента нз зоны воздействия иа объект
сигнал иа выходе датчика И исчезает, схемы 6 запираются и обмотки двигателя 1 обесточиваются до прихода следующего управляющего импульеа или до следующего перемещепия в рабочее положение инструмента 3.
Таким образом, сигнал от датчика инструмента, нееущий информацию о неремещепии ииструмента в зону механического воздействия на нозиционируемый объект, проходит через элемент ИЛИ и позволяет подключить обмотки двигателя к источнику питания и тем самым иредотвратить поворот ротора двигателя. Такой поворот ротора приводит к иотере точности позиционирования, что значнтельно снижает надежность и ухудщает качество работы прецизионных установок, использующих позиционный щаговый нривод, панример, автоматов для контроля и обработки иолупроводииковых пластин со структурами. Предлагаемое решение иозволяет сочетать отключение обмоток двигателя в периоды пауз между сериями управляющих импульсов, иозволяющее снизить потребляемую мощность, с кратковременным подключением обмоток на время воздействия инструмента, устраняющим потерю точности позиционирования. Причем отключение обмоток двигателя в установках уномянутого типа целесообразно, так как средняя продолжительность паузы между сериями управляющих импульсов при позициопироваиии больще среднего времени воздействия инструмента на позициоиируемый объект.
Форм}-л а изобретения
Устройство для управления шаговым электродвигателем по авт. св. № 439891, отличающееся тем, что, с целью повышения надежности при позиционировании приводимого электродвигателем объекта, подвергающегося воздействию рабочего органа, оно содержит датчик положения рабочего органа и двухвходовой элемент Р1ЛИ, выход которого подключен ко входам схем совпадения, а входы - соответственно к выходам узла запирания и датчика положения рабочего органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретный замкнутый электропривод | 1983 |
|
SU1159146A1 |
| Устройство для управления шаговым электродвигателем | 1981 |
|
SU961091A2 |
| Устройство для управления шаговым электродвигателем | 1972 |
|
SU473272A1 |
| Устройство для управления реверсивным шаговым электродвигателем | 1975 |
|
SU752727A1 |
| Устройство для управления шаговым двигателем | 1974 |
|
SU552913A3 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Устройство для управления шаговым электродвигателем | 1974 |
|
SU744888A1 |
| Шаговый электропривод | 1985 |
|
SU1354383A1 |
| Электропривод переменного тока | 1985 |
|
SU1363412A1 |
| Устройство для позиционирования рабочих органов деревообрабатывающих станков | 1987 |
|
SU1412945A1 |