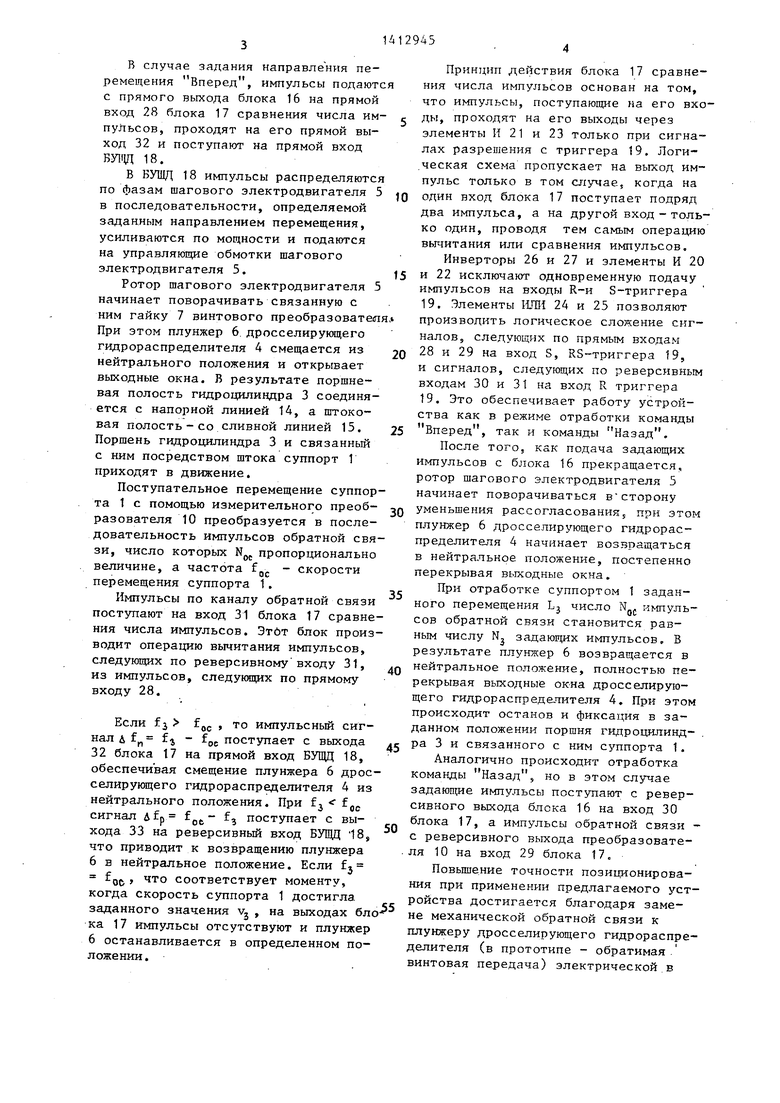
Фиг. 2
Изобретение относится к деревооб- рабатываклцей пpo ьшшeннocти и может
быть применено, например, в оборудовании для лесопиления.
Цель изобретения - повышение точ- hocTH позиционирования.
На фиг.1 изображена гидрокинематическая схема устройства; на фиг.2 - Структурная схема устройства; на фиг.З - функциональная схема блока рравнения числа импульсов. I Перемещение рабочего органа (суп- порта) 1 по направляющим 2 осуществляется гидроцилиндром 3, управляемым |четырехкромочным дросселирующим гидрораспределителем 4 с винтовым пре- юбразователем и шаговым электродвига- :телем 5 на входе (фиг,1). ; Плунжер 6 дросселирующего гидро- распределителя 4 кинематически связан |с гайкой 7 винтового преобразователя |Посредством валика 8 управления и |подпружиненных торцовых шайб 9.
Положение перемещаемого рабочего органа контролируется бесконтактным импульсным измерительным преобразователем (датчиком) 10, ротор которого кинематически связан с винтом 11 обратимого винтового механизма обратной связи. Винт 11 смонтирован в ра- диально-упорных шарикоподшипниках 12 и взаимодействует с гайкой 13, закрепленной в суппорте 1, При поступательном перемещении суппорта 1 с гайкой 13 винт 11 поворачивается в опорах: перемещению на шаг резьбы S соответствует один полный оборот винта и свзанного с ним ротора измерительного преобразователя 10.
Рабочая жидкость подводится к гидрораспределителю 4 по напорной линии ,14, а по линии 15 поступает на слив. В среднем (нейтральном) положении плунжера 6 дросселирующего гидрораспределителя 4 его выходные окна перекрыты и поршень гидроцилиндра 3 зафиксирован в определенном положении.
Управление позиционированием рабочего органа 1 осуществляется с помощью замкнутой импульсно-шаговой системы (фиг.2).
Импульсно-шаговая система управления содержит блок 16 задания переме- 55 щений с пультом преднабора координат, блок 17 сравнения числа импульсов, блок 18 управления шаговым электродвигателем (БУЩД) 5.
0
5
0
5
0
5
0
5
0
5
В качестве блока задания переие- щений может быть использована стандартная система ЧПУ импульсно-шагово- го действия, которая позволяет задать величину LJ перемещения числом Nj однородных электрических импульсов, а скорость Vjперемещения - частотой f3 их следования. При этом
Ц Л-Nj;
Vj A-fj,
где д - цена одного импульса или дискрета системы.
Выходы БУЩД 18 подключены к обмоткам управления шагового электродвигателя 5,
Поступательные перемещения рабочего органа 1 с помощью импульсного преобразователя 10 преобразуются в последовательность однородных электрических импульсов, которые по каналам обратной связи поступают на входы блока 17 сравнения числа импульсов. Электронный блок сравнения числа импульсов (фиг.З) выполнен на базе RS- триггера 19 с инверсными входами и логической схемы, состоящей из элементов И 20-23, ИЛИ 24 и 25 и инверторов 26 и 27.
Блок сравнения числа импульсов имеет два прямых входа 28 и 29, два реверсивных входа 30 и 31, прямой выход 32 и реверсивный выход 33. Связь элементов блока сравнения отражена на функциональной схеме, показанной на фиг.3.
Прямой вход 28 и реверсивный вход
30соединены соответственно с прямым и реверсивньы выходами блока 16 задания перемещений.
Прямой вход 29 и реверсивный вход
31соединены соответственно с ревер- сивнь1м и прямым выходами импульсного измерительного преобразователя 10.
Выходы 32 и 33 блока 17 соединены соответственно с прямым и реверсивным входами БУЩЦ 18.
Устройство работает следуюш м об-, разом.
Величина и направление требуемого перемещения вводятся оператором с пульта преднабора блока 16.
При команде Пуск в зависимости от заданного направления перемещения на одном из выходов блока 16 задания перемещений появляется последовательность задакшщх импульсов.
В случае задания направле ния перемещения Вперед, импульсы подаютс с прямого выхода блока 16 на прямой вход 28 блока 17 сравнения числа импульсов, проходят на его прямой выход 32 и поступают на прямой вход БУ1ЦД 18.
В НУШД 18 импульсы распределяются по фазам шагового электродвигателя 5 в последовательности, определяемой заданным направлением перемещения, усиливаются по мощности и подаются на управляющие обмотки шагового электродвигателя 5.
Ротор шагового электродвигателя 5 начинает поворачивать связанную с ним гайку 7 винтового преобразователя При этом плунжер 6. дросселирующего гидрораспределителя 4 смещается из нейтрального положения и открывает выходные окна. В результате поршневая полость гидроцилиндра 3 соединяется с напорной линией 14, а штоко- вая полость - со сливной линией 15, Поршень гидроцилиндра 3 и связанный с ним посредством штока суппорт 1 приходят в движение.
Поступательное перемещение суппорта 1 с помощью измерительного преоб- разователя 10 преобразуется в последовательность импульсов обратной связи, число которых Ngj пропорционально величине, а частота f.. - скорости
ос перемещения суппорта 1.
Импульсы по каналу обратной связи поступают на вход 31 блока 17 сравнения числа импульсов. Этбт блок производит операцию вычитания импульсов, следующих по реверсивному входу 31, из импульсов, следующих по прямому входу 28.
о(. , то импульсный сиг- „, поступает с
- J-j ое поступает с выхода
Если f3 f нал А f „ 4 32 блока t7 на прямой вход БУЩЦ 18, обеспечивая смещение плунжера 6 дросселирующего гидрораспределителя 4 из нейтрального положения. При f « f сигнал ifp f ot з поступает с выхода 33 на реверсивньй вход БУЩЦ 18, что приводит к возвращению плунжера 6 в нейтральное положение. Если 3 fgj. , что соответствует моменту, когда скорость суппорта 1 достигла заданного значения Vj , на выходах бл ка 17 импульсы отсутствуют и плунжер 6 останавливается в определенном положении.
10
15
п
0
5
5
0
5
0
5
Принцип действия блока 17 сравнения числа импульсов основан на том, что импульсы, поступающие на его входы, проходят на его выходы через элементы И 21 и 23 только при сигналах разрешения с триггера 19. Логическая схема пропускает на выход импульс только в том случае, когда на один вход блока 17 поступает подряд два импульса, а на другой вход - только один, проводя тем самым операцию вычитания или сравнения импульсов.
Инверторы 26 и 27 и элементы И 20 и 22 исключают одновременную подачу импульсов на входы R-и S-триггера 19. Элементы ИЛИ 24 и 25 позволяют производить логическое сложение сигналов, следующих по прямым входам 28 и 29 на вход S, КЗ-триггера 19, и сигналов, следующих по реверсивным входам 30 и 31 на вход R триггера 19, Это обеспечивает работу устройства как в режиме отработки команды Вперед, так и команды Назад.
После того, как подача задающих импульсов с блока 16 прекращается, ротор шагового электродвигателя 5 начинает поворачиваться в сторону уменьшения рассогласования, при этом плунжер 6 дросселирующего гидрорас- пределителя 4 начинает возвращаться в нейтральное положение, постепенно перекрывая выходные окна.
При отработке суппортом 1 заданного перемещения Lj число N, импульсов обратной связи становится равным числу N задающих импульсов. В результате плунжер 6 возвращается в нейтральное положение, полностью перекрывая выходные окна дросселирующего гидрораспределителя 4, При этом происходит останов и фиксация в заданном положении поршня гидроцилинд- . ра 3 и связанного с ним суппорта 1.
Аналогично происходит отработка команды Назад, но в этом случае задающие импульсы поступают с реверсивного выхода блока 16 на вход 30 блока 17, а импульсы обратной связи - с реверсивного выхода преобразователя 10 на вход 29 блока 17,
Повьппение точности позиционирования при применении предлагаемого устройства достигается благодаря замене механической обратной связи к плунжеру дросселирующего гидрораспределителя (в прототипе - обратимая винтовая передача) электрической в
йиде импульсного измерительного пре- (Dбpaзoвaтeля, вырабатывающего импульсные сигналы в соответствии с величи- и ой и скоростью перемещения рабочего органа блока сравнения числа поступающих на его входы задающих импульсов и импульсов обратной связи. Зона нечувствительности данных элементов о.б, ратной связи определяется дискретой устройства, которая может быть выбрана сколь угодно малой. Кроме того, ймпульсньй измерительный преобразователь в предлагаемом устройстве конт- (золирует положение непосредственно рабочего органа, что позволяет устра- HrfTb погрешности, возникающие из-за и деформаций в соединении што- 1ка с рабочим органом. ,
Формула изобретения
1. Устройство для позиционирования рабочих органов деревообрабатывающих станков, включающее гидроцилиндр пе- ремещения рабочего органа, дросселирующий гидрораспределитель с рьшолнен ным в виде шагового электродвигателя приводом перемещения его плунжера, блок задания перемещений и блок уп- равления щаговым электродвигателем, обличающееся тем, что, с целью повышения точности позиционирования, устройство снабжено имеющим прямой и реверсивный выходы импульсным датчиком перемещения рабочего органа и блоком сравнения числа импульсов, который имеет два прямых и два
5
0
5 о
реверсивных входа, а также прямой, и реверсивный выходы, блок задания перемещений выполнен с прямым и реверсивным выходами, а блок управления
шаговым электродвигателем.- с прямым
X
и реверсивным входами, причем один прямой и один реверсивньм входы блока сравнения числа импульсов соединены соответственно с прямым и реверсивным выходами блока задания перемещений, к прямому и реверсивному выходам импульсного датчика перемещения рабочего органа подключены соответственно два других входа блока сравнения числа импульсов, а его прямой и реверсивный выходы связаны с соответствующими входами блока управления шаговым электродвигателем.
2. Устройство ПОП.1, отличающееся тем, что блок сравнения числа импульсов выполнен в виде RS-триггера и двух цепей, каждая из которых содержит двухвходовьй элемент 1ШИ, инвертор и два двухвходовых элемента И, причем в каждой цепи выход элемента ИЛИ подключен на один из входов первого элемента И и через инвертор - на другой вход первого элемента И другой цепи, выход первого элемента И соединен с одним из входов RS-триггера и с одним из входов второго элемента И, другой вход которого связан с одним из выходов RS-триггера, при этом выходы блока образованы выходами вторых элементов И, а каждая пара входов блока содержит по одному входу от каждого элемента ИЛИ.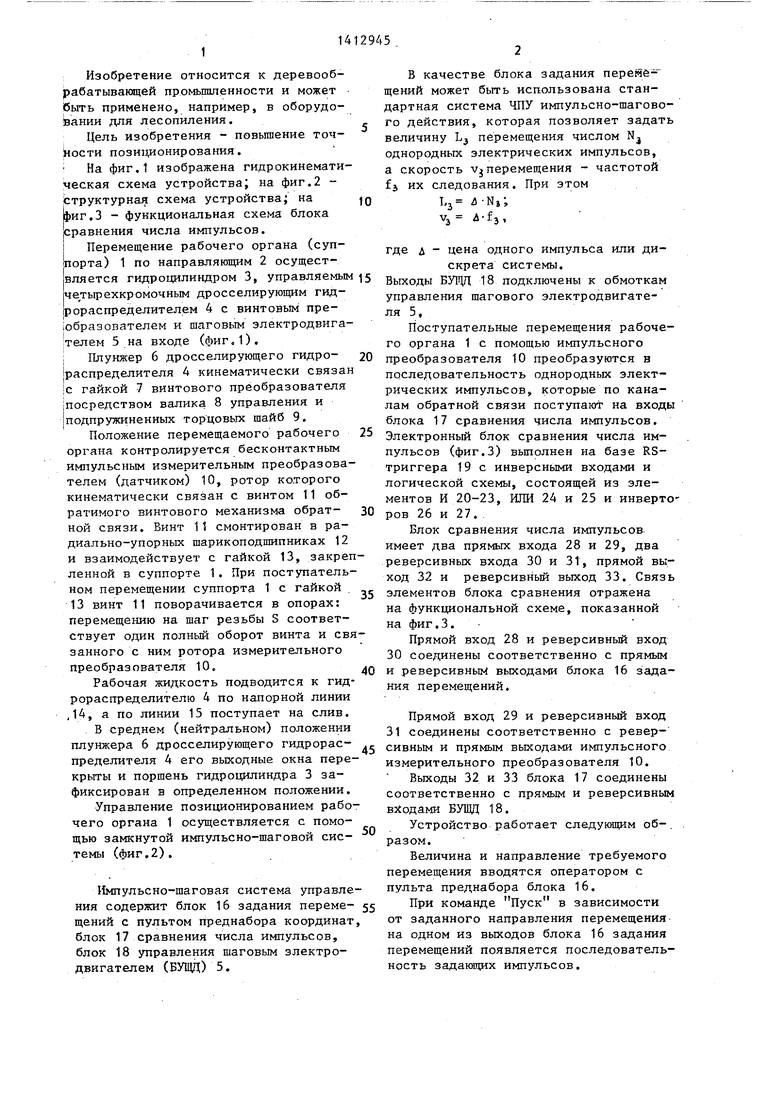

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления подачей ножевого суппорта лущильного станка | 1988 |
|
SU1676804A1 |
| Устройство для управления подачейНОжЕВОгО СуппОРТА лущильНОгО CTAHKA | 1979 |
|
SU816745A1 |
| Цифровая система программного управления | 1979 |
|
SU883868A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Цифровой электрогидравлический привод | 1979 |
|
SU823665A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Система программного управления рабочим органом горной машины | 1981 |
|
SU960435A1 |
| Аналого-цифровое устройство для управления токарным станком | 1980 |
|
SU947830A1 |
| Устройство для управления положением рабочих органов | 1977 |
|
SU677911A1 |

Изобретение относится к деревообрабатывающему оборудованию. Цель изобретения - повьшение точности позиционирования. Устройство содержит рабочий орган (суппорт) 1, гидроцилиндр 3 его перемещения, управляемый дросселирукяцим гидрораспределителем 4, плунжер которого связан с шаговым электродвигателем 5. С рабочим органом 1 кинематически связан подвижньй злемент импульсного датчика 10. Выходы датчика 10 совместно с выходами блока 16 задания перемеще- ния подключены к входам блока 17 сравнения числа импульсов, выходы которого подключены к входам блока 18 управления шаговым двигателем. Цри задании перемещения блок 16 в зависимости от требуемого направления перемещения вьщает с одного из своих выходов последовательность импульсов, количество которых соответствует величине перемещения. Импульсы проходят на блок 18, который коммутирует их по фазам шагового двигателя 5, плунжер гидрораспределителя 4 сдвигается из нейтрального положения, что приводит к перемещению штока гидрораспределителя 4 и связанного с ним рабочего органа 1. На соответствующем направлению движения выходе датчика 10 появляются импульсы, количество и частота которых соответствует величине и скорости перемещения рабочего органа 1. Блок 17 проводит операцию вычитания (сравнения) импульсов, поступакицих с блока 16, и импульсов, поступающих с датчика 10. После прекращения вьщачи импульсов блоком 16 гидрораспределитель 4 закрывается импульсами от датчика Ю,... при этом количество импульсов от датчика 10 равно количеству импульсов, ввданных блоком 16. 1 з.п. ф-лы, 3 ил. СО
ff
фиб.д
| Устройство для управления положением рабочих органов | 1984 |
|
SU1209434A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Устройство для управления положением рабочих органов | 1977 |
|
SU704782A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
