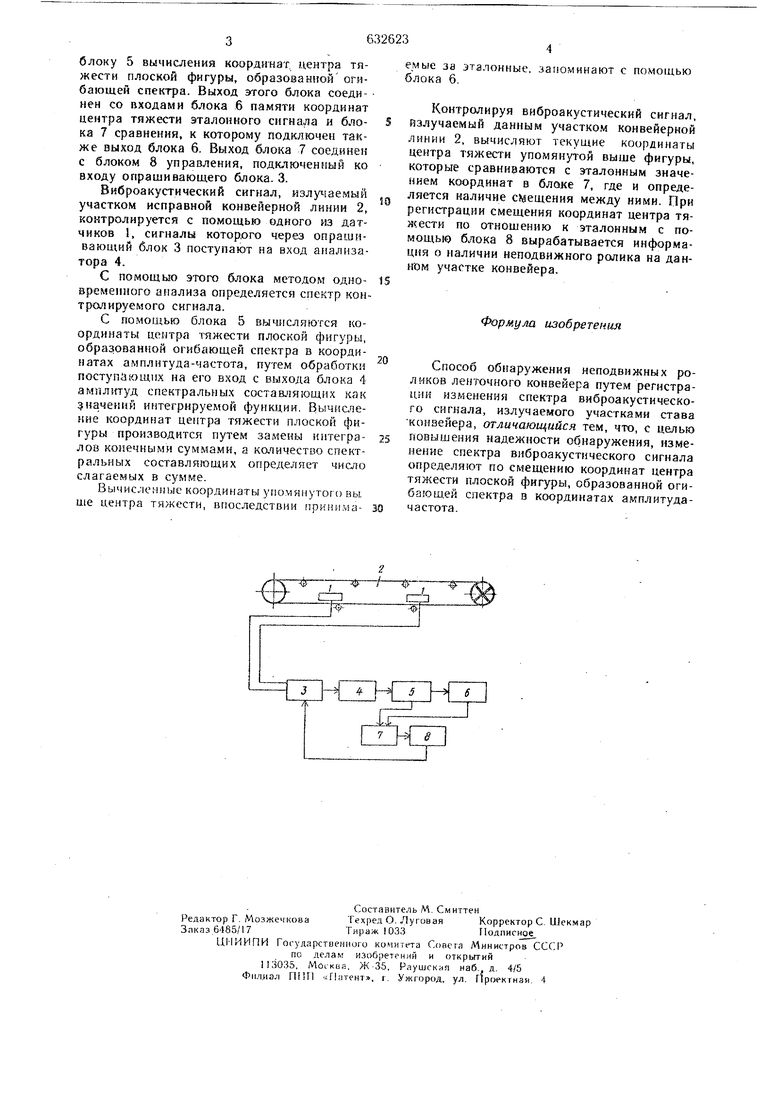
блоку 5 вычиа/1ения коордц-нат. центра тпжести плоской фигуры, образованной огибающей спектра. Выход этого блока соединен со входами блока 6 памяти координат центра тяжести эталонного сигнала и блока 7 сравнения, к которому подключен также выход блока 6. Выход блока 7 соединен с блоком 8 управления, подключенный ко входу опрашивающего блока- 3. Внброакустический сигнал, излучаемый участком исправной конвейерной линии 2, контролируется с помощью одного из датчиков 1, сигналы которого через опрашивающий блок 3 поступают на вход анализатора 4. С помощыо эгого блока методом одновремепного ангзлиза определяется спектр контролируемого сигнала. С noMoujbiO блока 5 вычисляются координаты центра тяжести плоской фигуры, образованной огибающей спектра в координатах амплитуда-частота, путем обработки поступающих на его вход с выхода блока 4 амплитуд спектральных состашшющих как значений интегрируемой функции. Вычисление координат центра тяжести плоской фигуры производится путем замены интегралов конечными суммами, а катичество спектральных составляющих определяет число слагаемых в сумме. Вычисленные координаты упомянутого вы ше центра тяжести, впоследствии принимамые за эталонные, загюмииают с немощью лока б. Контролируя виброакустический сигнал, излучаемый данным участком конвейерной линии 2, вычисляют текущие координаты центра тяжести упомянутой выще фигуры, которые сравниваются с эталонным значением координат в блоке 7, где и определяется наличие смещения между ними. При регистрации смещения координат центра тяжести по отнощению к эталонным с помощыо блока 8 вырабатывается информация о наличии неподвижного ролика на данtiDM участке конвейера. Формула изобретения Способ обнаружения неподвижных роликов ленточного конвейера путем регистрации изменения спектра виброакустического сигнала, излучаемого участками става конвейера, отличающийся тем, что, с целью повышения надежности обнаружения, изменение спектра виброакустического сигнала определяют по смещению координат центра тяжести плоской фигуры, образованной огибающей спектра в координатах амплитудачастота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обнаружения неподвижных роликов ленточного конвейера | 1975 |
|
SU566755A1 |
| Способ определения технического состояния роликоопор ленточного конвейера | 1989 |
|
SU1710463A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2456542C2 |
| Способ автоматического контроля крупности кускового материала | 1990 |
|
SU1749778A1 |
| СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАШИНЫ | 1998 |
|
RU2133953C1 |
| Способ диагностики технического состояния механизмов | 1980 |
|
SU909617A1 |
| СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАШИНЫ | 1973 |
|
SU453603A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ | 2021 |
|
RU2755402C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЦЕЛЕЙ ПО ГИДРОЛОКАЦИОННЫМ СИГНАЛАМ | 2008 |
|
RU2368919C1 |
| СПОСОБ ОЦЕНКИ КАЧЕСТВА МАСКИРУЮЩЕГО АКУСТИЧЕСКОГО (ВИБРОАКУСТИЧЕСКОГО) ШУМА | 2007 |
|
RU2350023C1 |
-1Г
