Изобретекие относ ется к автоматике, в частности к автоматизированным системам управяекия технологическими про- цессаь5й (АСУТП) с епектроннонцифровы- ми вычислительными машинами (ЭВМ), управляющими аналоговыкш пневматическими исполнительными механизмами (АПИМ) и резервируюшнми ЭВМ аналоговыми электрическими регупятораг та (АР).
Иа&естнь устройства комбинированного а алого иифрового управления аналоговым исполнительным механизмом |.lj
Из известных устройств комбинирован- ного аналотчэ-цифрового управления исполнительным механизмом наиболее близким к изобретению по техничесюзй сущности является устройство, содержашее ЭВМ, первый вход и первый выход которой соединены соответственно с первым вьтхо- дом и первым входом буферного регистра кодов, переключатель, первый и второй выходы которого подключены соотаетственно к первому входу аналогового регупято ра и через усилитель - к первому вхопу обмотки управления двигателя, ко второму входу которого через блок управления скоростью подключен второй выход буферного регистра кодов, зал двигателя механически соединен с преобразователем /гол-ток, ручным задатчиком и указате- лем, датчик давления, механически соединенный с исполнительным механизмом, выход датчика давления через преобразователь давление-код соединен со вторыми входами ЭВМ и аналогового регу:Лятора Ц. Это известное устройство характеризуется большой погрешностью передачи сигнала на исполнительный механизм.
Цель изобретения заключается в по-
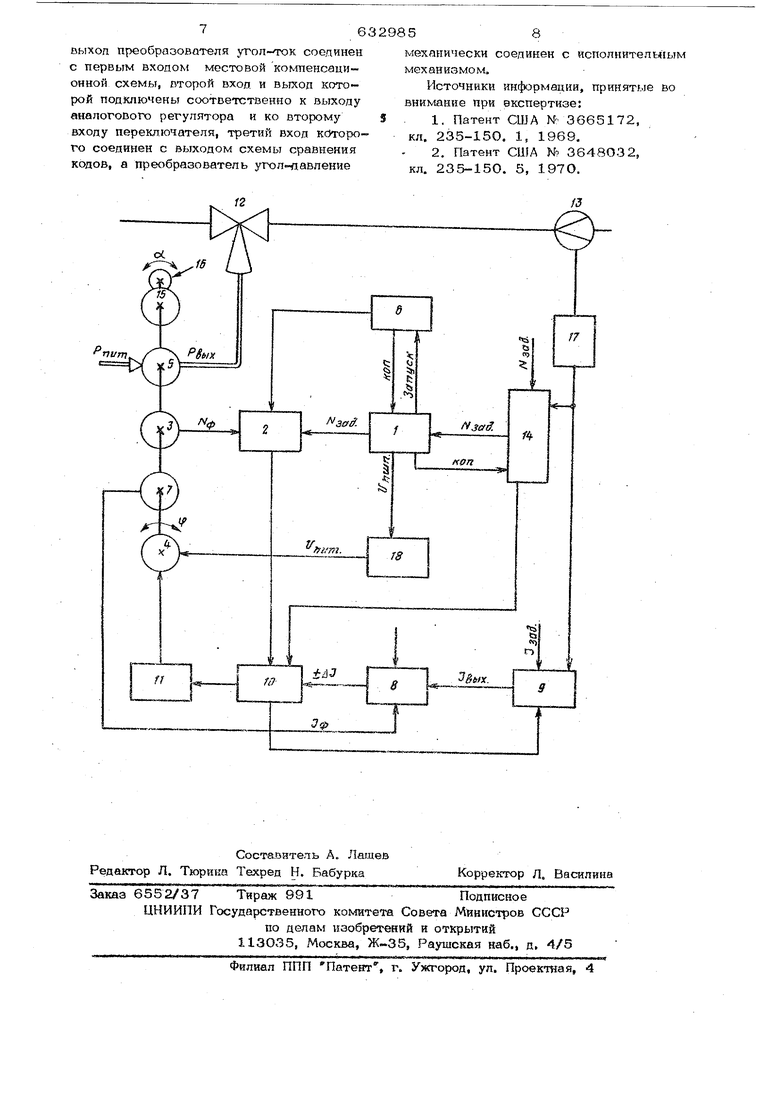
вь шении точности. В предлагаемом устройстве это достигается тем, что в него пополнительно введены преобразователь угол-код, преобразователь угол-давление, распределитель, хкгстовая компенсаиионаая схема и схема сравнения кодов, к первому, второму и третьему входам которой псщключены соответственно первый выход распределителя, третий выход буферного регистра кодов и выход преобразоJ63вятеля угол-код, который механически схзепинен с преобразователем утх л аавление и с валом двигателя, вход и второй выход радпределителя подключены соответственно к четвертому выходу и второму входу буферного регистра кодов, вьк ход преобразователя угол-ток соединен с первым входом мостовой компенсационной схемы, второй вход и выход которой подклю чены соответственно к выходу аналогового регулятора и ко второму входу переключателя, третий вход которого соединен с ьы ходом схемы сравнения кодов, а преобразователь угол-лавление механически соединен с исполнительным механизмом. На чертеже представлена функциональ ная схема .предлагаемого устройства. Оно содержит буферный регистр 1 кодов, схему 2 сравнения кодов, преобразователь 3 угол-код, двигатель 4, преобразователь 5 угол-йавление, распределитель 6, преобразователь 7 угол-тх к, мос тоЁую компенсационную схему 8, аналоговый регулятор 9, переключатель 10, усилитель 11, исполнительный механизм 12, датчик 13 давления, электронно-вы числительную N«mHHy (ЭВМ) 14, указатель 15, ручной аадатчнк 16, преобразо ватель 17 да&ленйе-код и блок 18 управ ления скоростью. Код W задания поступает на буферный регистр 1 при работе от ЭВМ 14, где запоминается. Одновременно с кодом задания на регистр 1 поступает код скоРОСТИ двигателяи п , который с помощью блока 18 преобразуется в соответствующее напряжение питания двигателя 4. Двигатель находится -в состоянии покоя, так как со схемы 2 через переключатель 10 на усилитель 11 поступает сигнал .О. , Работа устройства начинается шэсле подачи сигнала Запуск на распределитель 6. Этот сигнал подается от ЭВМ 14 одновременно с кодом и через схему задержки поступает на распределитель 6. Задержка может вырабатываться и программно в ЭВМ. По сигналу Запуск рас пределитепь 6 подключает к схеме 2 ,шины cTaptmix разрядов преобразователя 3 и регистра 1 При разнице кодов схема 2 вырабатывает сигнал I с признаком больше или меньше , который заторможивает распределитель 6 на данном разряде и одновременно через переключатель 1О поступает на соответствующий вход усилителя 11. Усилитель 11 подключает к обмоткам упр авления двигателя 4 подготовленное в блоке 18 напряжение И f,Y Ззл двигателя 4 начинает поворачиваться в заданном направлении. С валом двигателя жестко связаны преобразователи 3, 5 и 7, которые поворачиваются на этот же угол, и их выходные сигналы изменяются одновременно. При сравнении кодов распределитель 6 автоматически растормаживается и подютючает к схеме 2 следующий младший разряд и так далее до полного сравнения кодов преобразователя 3 и буферного регистра I. По окончании сравнения последний разряд распределителя б выдает на буферный регистр 1 сигнал 1, соответствующую признаку Конец операции (КОП). Если коды равны, распределитель б Гмтновенно пробегает все разряды и сигнал КОП появляется на регистре 1 также мгновенно. Время задержки этого стенала зависят от быстродействия логических элементов и может быть очень мальтм (1-1О мкс). Сигнал КОП иавещает ЭВМ 14 о выполиении команды. Этот же сигнал разрешает ЭВМ подачу новой команды, которая не может быть принятой на буферный регистр 1 до окончания вьгаолнекия предыдущей. Одновременно на выходах преобразователей 5 и 7 после отработки команды устанавливаютс5 выходные сигналы fi.R,. иЛ 3, ВЫХ ЗОА. где О j,g. - аналоговое значение кода Э&М, поступающее в виде команды АПИМ, а Pgjj, -соответствующее етому коду выходное давление по АПИМ. Вследствие жесткости связи выходное давление .Рг,аА. а1Ма„д ааУф--азФг,,,д, где Oj-jj - коэффициенты пропорциональ ности. Приведенная среднеквадратичная погрешность выходного сигнала c i, где 6 f -погрешность преобразования входного сигнала в утоп поворота;GP -Погрешность преобразования угла поворота в давление. Входным сигналом может быть код или ток, поэтому при аналоговом управлении6.H,.6., -погрешность отработки сигна . па двигателем; -погрешность схэмы сравиени (компенсационного метода). Время установления выходного сигна ла (быстродействие устройства) зависит от IT Пит и разницы ко дов Nj,-) гдХ. Пренебрегая потерей времени при записи кода на буферный регистр 1 и переключениями рас пределителя б, которые ничтожно ьшлы отношению к скорости вращения вала дви гателя 4, можно считать, что «.i.uJ,if u aJuW|, где K,j. - постоянная скорость двигателя, установленная кодом Uw... . Следовательно, изь-аняя К изменять время установления сигнала, так как , то джшый вид управления соответствует интегральному регулятору с переменнэй величиной посто янной времени интегрирования () 1/вГ При передаче управления аналоговому регулятору (АР) 9, переключатель 1О переключает вход усилителя 11 на мосто вую компенсационную схему 8. Одно пле чо моста является неразрывной нагрузкой АР 9, поэтому по нему, протекает так О а у j{ соответствующий JQI, АР, другое плечо моста подключено к преобразователю угоп-ток 7, и по нему проте кает ток 3 3 зад. соответствующий . заданию ЭВМ 14, Разность токов дЭ J аад. эад. приводит к срабатыванию усилителя 11 и соответственно повороту вала двигателя 4 до полной компенсации разницы сигналов. Изменение положения вала вызывает изменение выходного давленияР, .-2 3 г т.е. нсполнитеаьный механизм 12 (АПИМ занимает новое положение, соответствующее заданию АР 9. Переход в ето поло жение 1фоисходит , без толчков за время it 4.02 Обратный переход управления к ЭВМ 14 протекает аналогично, с той лишь р1азницей, что отработка сигнала М эад, производится цифровой схемой от положе ния остагпенного АР 9 . При отключении питания или неисправ4, усилителя кости, например, дватателя 11, переключателя Ю усггройство может управляться вручную с помощью ручного задатчика 16 и указателя 15. Предлагаемое устройство достаточно просто, точно и надежно способно рабо-тать с любой ЭВМ, имеющей программный канал и резервный аналоговый електрический регулятор, обладас.г повышенными функциональными возможностями изменения времени обработки команды ЭВМ исполнительным механизмом, |)фект от использования изобретения зависит от конкретной АСУТП, в частности от количества контуров управ- ленйя переменными. По сравнению со стандартным оборудованием примерная вкономия составит не менее 5ОО р. на 1 контур. Формула изобретения Устройство для управления исполнительньп механизмом, содержащее электронно-вычислительную машину (ЭВМ), первый вход и первый вьгхоц которой соединены соответственно с первым выходом и первы л входом буферного регистра кодов, переключатель, первый и второй выхсщы которого подключены соответственно к первому входу аналогового регулятора и через усилитель - к первому входу обмотки управления двигателя, коВторому входу которого Через блок управления скоростью подключен второй выход буферного регистра кодов, вал двигателя механически соединен с преобразователем угол-ток, ручным задатчпком и указателем, датчик давления, механически соединенный с исполнительным механизмом, выход датчика давления через преобразователь давлениекод соединен со вторыми входами ЭВМ и аналогового регулятора, отличающееся тем, что, с целью повышения ТОЧНОСТИ устройства, оно содержит преобразователь угол-код, преобразователь угол-давление, распределитель, мостовую компенсационную схему и схему сравнения одов, к первому, второму и третьему входам которой подключены соответственно первый выход распределителя, третий выход буферного регистра кодов и выход преобразователя угол-код, который механически соединен с преобразователем уголдавление и с валом двигателя, вход и второй выход распределителя подключены оответственно к четвертому выходу и торому входу буферного регистра кодов. 76 выхоп преобразователя утоп-ток соединен с первым входом местовой компенсаци онной схемы, второй вход и выход которой подключены соответственно к выходу аналогового регулятора и ко второму входу переключателя, третий вход кОторо го соединен с выходом схемы сравнения кодов, а преобразователь угол-давление 5 механически соединен с исполнительным механизмом, Источники информации, принятые во внимание при экспертизе: 1.Патент США № 3665172, кл. 235-150. 1, 1969. 2.Патент США № 3648О32, кл. 235-150. 5, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный преобразователь код-угол | 1975 |
|
SU526935A1 |
| Многоканальное устройство для ультразвукового контроля изделий | 1989 |
|
SU1732259A1 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| СТЕНД ФУНКЦИОНАЛЬНОГО КОНТРОЛЯ И ДИАГНОСТИКИ ЭЛЕКТРОННЫХ РЕГУЛЯТОРОВ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2005 |
|
RU2308749C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
| Устройство управления вибростендом | 1979 |
|
SU821988A1 |
| Устройство для контроля работы сельскохозяйственных машин для внесения жидкостей | 1988 |
|
SU1676565A1 |
| Устройство телемеханики | 1984 |
|
SU1304050A1 |
| УПРАВЛЯЮЩИЙ АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2001 |
|
RU2222028C2 |
| Устройство управления процессом резания | 1986 |
|
SU1393531A1 |
