предлагаемый ;С1Гоэсо б отличается от существующего .способа измерения расстояний до предмета, от(разкающего электром-агштные колебания, тем, что на приёме частота, получаемая в ревультате детектирования прямого и отражённого частотно-модулированного сигнала, остаётся постоянной.
В зависимости от расстояния до отражающего предмета автоматически изменяется глубина частотной модуляции или частота модуляции так, чтобы частота биений оставалась постоянной.
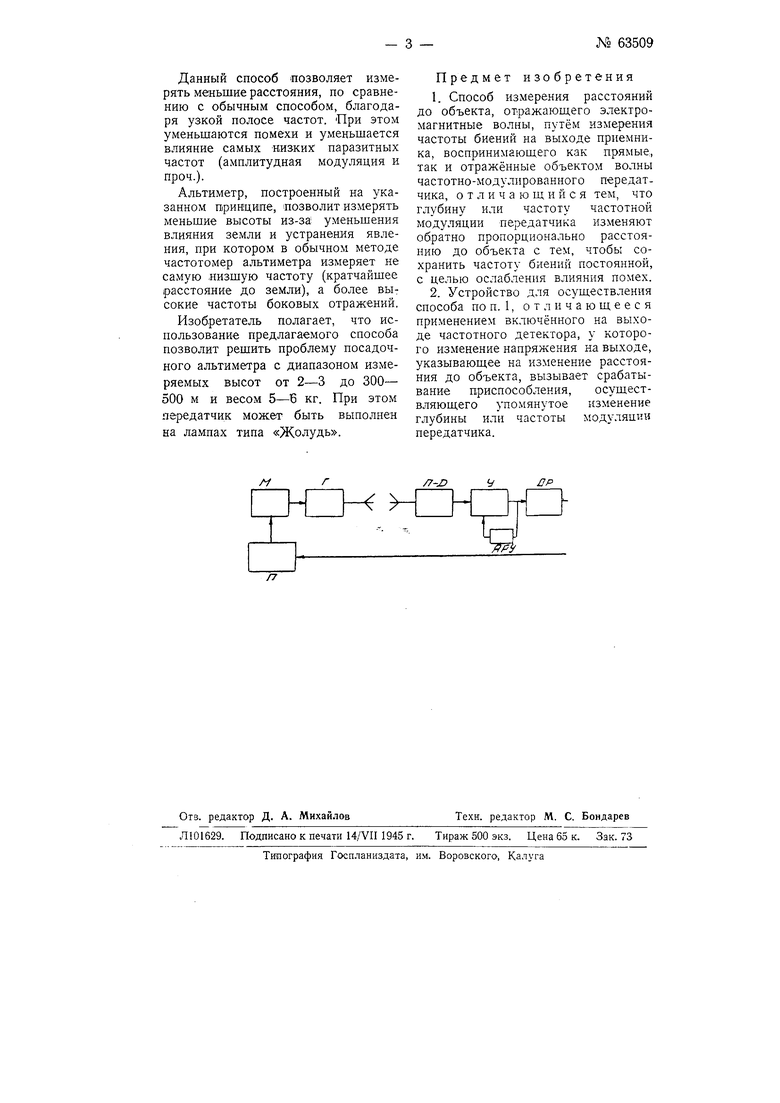
Сущность изобретения поясняется чертежом, изображающим блоксхему устройства для осуществления предлагаемого способа; в левой части схемы показан передатчик, состоящий из модулятора М, генератора Г и преобразователя П, а в правой части-.приемник с преселектором и детектором П-D, усилителем У, дискриминатором - ДР и автоматической регулировкой усиления АРУ.
Антенна передатч1ика излучает частотно-модулированные электромагнитные колебания УКВ или ДЦВ генератора, который модулируется по частоте специальным модулятором.
Используется частотная ,иодуЛяция по закону пилообразной йлл ломаной кривой с .постоявдой .скоростью изменения частоты. В этом случае, как известно,
F F(f
X лпед , in
fmax, foiJQ - максимальное и мигденимальное значения частоты генератора, Fm - частота модуляции, I - расстояние до отражающего предмета, С - скорость распространения электромагнитных колебаний, К - коэфициент, F - частота биений между прямым и отражённым лучом.
Антенна принимает одновременно прямой и отражённый сигналы, которые после преселекто ра подаются на детектор. В результате детектирования выделяется частота биений F. Первый усилитель пропускает узкую полосу частот н имеет максимальное усиление на частоте FO.
Автоматическая регулировка усиления поддерживает выходное папряжение постоянным при различHQM уровне отражённых сигналов. Усиленное напряжение с частотой F подаётся . на дискриминатор, имедаг щий резонансную рабочую часто.-, ту FO . В зависимости от частоты F на выходе дискриминатора изменяется постоянное напряжение. Выходнре. напряжение дискриминатора управляет преобразователем П. Преобразователь при различных расстояниях 1 до отражающегопредмета изменяет или глубину частотной модулйций, или частоту модуляции передатчика так, чтобы частота F была равной t,) или близкой FO Фаза выходного напряжения дискриминатора выбирается такой, что, если при данной F в первый момент h Го, то выходное напряжение дискриминатора уменьшает глубину частотной модуляции или частоту модуляции преобразовате-, ля, т. е. и F. Это уменьшение происходит до момента, пока не получится FO Р. Б качестве дискриминатора может быть использована одна из известных схем. Преобразователь, как указано, изменяет глубину модуляции или частоту модуляции в зависимости от выбранного метода. При изменении глубины модуляции преобразователь может быть выполнен аналогично устройству, включённому на выходе дискриминатора в схемах с автоподстройкой частоты. При изменении частоты модуляции преобразователем модуляп,ия может осуществляться, как обычно, изменением ёмкости переменного конденсатора, включённого в контур генератора, ротор которого вращается мотором постоянного тока. Изменение частоты модуляции осуществляется изменением скорости вращения мотора. Для этого, например, выходное напряжение дискриминатора, усиленное каскадом усилителя постоянного тока, питает обмотку возбуждения шунтового мотора так, чтобы изменение выходного напряжения дискриминатора вызывало изменение числа оборотов мотора. В последнем случае необходимо иметь мотор с малым моментом инерции, чтобы сократить время нестационарных процессов. ;
Для показания расстояний может быть использован магнитоэлектрический прибор, включённый на выходе дискриминатора и имеющий в метрах до отражающего предмета.
При отсутствии, отража юшего предметав зоне действия устройства глубина .модуляции или частота. -модуляции.должны быть минимальными с тем, чтобы при появлении и уменьшении расстояний до отражающего предмета глубина модуляции или частота модуляции повышались.
Предлагаемое устройство может быть использовано как абсолютный альтиметр, обна|ружитель самолётов и ДЛЯ-других-делей.
Для расширения поисковой зоны в устройстве должна быть соответствующим образом подобрана полоса пропускания усилителя и чувствительность дискриминатора. Кроме этого, может применяться-специальная автоматика, которая, при отсутствии отражающих предметов, изменяла бы глубину модуляции или частоту модуляции в необходимых пределах с те.м, чтобы при появлении отражающего сигнала прибор автоматически начинал измерять расстояние.
Полоса пропускания частот приемника данного устройства может быть меньше в 50-100 раз, чем при обычном методе. Соответственно уменьшаются помехи на приём. Следовательно, чувствительность приемника может быть повышена в 8-10 раз, при этом предлагаемый способ даёт соответствующий выигрыш мощности передатчика или дальности действия, уменьшая основной недостаток частотного метода - высокий уровень помех.
При отсутствии в рабочей зоне отражающего предмета стрелка прибора всегда будет находиться за шкалой.
Исдользуя две рабочих полосы пропускания приемника (на низких и более высоких частотах), легко получить устройство с двумя шкалами и с большой точностью измерения дистанций.
Данный способ позволяет измерять меньшие расстояния, по сравнению с обычным способом, благодаря узкой полосе частот. При этом уменьшаются помехи и уменьшается влияние самых низких: паразитных частот (амплитудная модуляция и проч.).
Альтиметр, построенный на указанном П|ринци1пе, позволит измерять меньшие высоты из-за уменьшения влияния земли и устранения явления, при котором в обычном методе частотомер альтиметра измеряет не самую низшую частоту (кратчайшее расстояние до земли), а более высокие частоты боковых отражений.
Изобретатель полагает, что использование предлагаемого способа позволит решить проблему посадочного альтиметра с диапазоном измеряемых высот от 2-3 до 300- 500 м и весом 5-6 кг. При этом передатчик может быть выполнен на лампах типа «Жолудь.
Предмет изобретения
1.Способ измерения расстояний до объекта, от1ражаюш,его электромагнитные волны, путём измерения частоты биений на выходе приемника, воспринимающего как прямые;, так и отражённые объектом волны частотно-модулированного передатчика, отличаюш;ийся тем, что глубину или частоту частотной модуляции передатчика изменяют обратно пропорционально расстоянию до объекта с тем, чтобы сохранить частоту биений постоянной, с целью ослабления влияния помех.
2.Устройство для осушествления способа по п. 1, о т л и ч а ю ш; е е с я применением включённого на выходе частотного детектора, у которого изменение напряжения на выходе, указывающее на изменение расстояния до объекта, вызывает срабатывание приспособления, осуществляющего упомянутое изменение глубины или частоты модуляции передатчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОВЫСОТОМЕР С ЧАСТОТНО-МОДУЛИРОВАННЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 2012 |
|
RU2519952C2 |
| Передатчик или приемник частотно-модулированных колебаний | 1940 |
|
SU63529A1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1996 |
|
RU2106655C1 |
| Радиоальтиметр | 1940 |
|
SU71320A3 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАЛЬНОСТИ (ВАРИАНТЫ) | 1999 |
|
RU2154285C1 |
| Супергетеродинный радиоприемник | 1940 |
|
SU63915A3 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ РАДИОВЫСОТОМЕР | 2003 |
|
RU2263330C2 |
| Акустический профилограф для получения изображения поверхности дна (варианты) | 2017 |
|
RU2682081C2 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |
| Способ позиционирования надводного/подводного объекта при его проходе по заданному фарватеру | 2019 |
|
RU2726388C1 |
ДР
