Изобретение относится к пневмо- гидроавтоматике, может быть использовано в устройствах перемещения рабочих органов промышленных роботов и манипуляторов и является усовершенствованием изобретения по основному авт, св. № 1188377,
Цель изобретения - улучшение динамических характеристик и повышение точности.
На чертелсе изображена схема пнев- могидравлического следящего привода.
Привод содержит исполнительный гидроцилиндр 1, пневмогидравлический преобразователь 2 давленияs имеющий связанные общим штоком 3 пневмоци- линдр 4 и гидроцилиндр 5, обе полости 6 и 7 которого через обратные калапа- ны 8 и 9 сообщены с гидроаккумулятором 10, а также с полостями 11 и 12 исполнительного гидроцилиндра 1, и пневмогидравлическое управляющее устройство 13 с корпусом 14, жестко связанным с выходным элементом 15 исполческих сопл 40 и 41, встречно установленных в камерах 34 и 35, жестко соединенных с распределителем 26 и разделенных распределителем 25, при
5 этом входные каналы 42 и 43 сопл 40 и 41 соединены с источником 31 питания, а междроссельные камеры 44 и 45, образованные дросселями и выходными каналами (не обозначены) сопл 40 и
JO 41, - с полостями 29 и 30 преобразователя 2 давления.
Пневмогидравлический следящий привод работает следующим образом. При наличии управляющего входного
15 сигнала распределитель 26 распределительного элемента 21 перемещается относительно корпуса 14 пневмогидрав- лического уп13авляющего устройства 13, например, вправо. Вместе с плос20 КИМ пневматическим распределителем 26 переместятся вправо,жестко связанные сопла 40 и 4I и подпружиненный пружинами 38 и 39 относительно плоеных поверхностях (не обозначены)и расположенным внутри корпуса 14 подпру- ЖI« eнным распределительным элементом 215 оппозитные наружные поверхности
кого пневматического распределителя нительного гидроцилиндра 1 и имеющим 26, плоский гидравлический распреде- проточки 16 - 20 на внутренних оппозит- литель 25. Причем пружины 38 и 39 выбираются и устанавливаются так, чтобы при действии управляющего сигнала и номинальных давлениях в полостях 11 30 и 12 исполнительного гидроцилиндра 1 и внутренних управляющих камер 36 и 37 не происходило перемещение пневматических сопл 40 и 41 и плоского ; гидравлического распределителя 25, 35 т.е. чтобы при смещении оставались неизменными величины зазоров между пневматическими соплами 40 и 41 и соответственно торцовьми поверхнос(не обозначены) которого имеют про- точкн 22 24 и образуют с проточками 16 20 корпуса 14 плоский гидравлический распределитель 25 и плоский пневматический распределитель 26 с торцовыми поверхностями 27 и 28, сообщенный с полостями 29 и 30 пневмо- цилиндра 4 пнезмогидравлического преобразователя 2 давления, источником 31 питания 3 атмосферой и связанный с задатчиком 32 входного сигнала, Б распределителе 26 выполнена полость 33э в которой с образованием внешних управляющих камер 34 и 35 i в нутрен- них управляющих камер.36 и 37 установлен плоский гидравлический распределитель 25, подпружиненный пружинами 38 и 39 относительно плоского пневматического распределителя 26 и сообщенный с
тями 27 и 28 плоского гидравлическо- 40 го распределителя 25 (торцорые поверхности 27 и 28 рассматриваются как заслонки относительно, соответственно, пневматических сопл 40 и 41),
При этом воздух от источника 31 питания через проточки 19 и 23,поступает в полость 30 пневмоцилиндра 4 и во входные каналы 42 и 43 сопл 40 и 41 , полость 29 пневмоцилиндра 4
полостью 11 и 12 исполнительного гид- 50 через .проточки 24 и 20 соединяется
роцилиндра 5 пневмогидравлического преобразователя 2 давления, причем внутренние управляющие камеры 36 и 37 сообщены с полостями 11 и 12 исполнительного гидроцилиндра 1,
Привод снабжен корректирующим устройством, выполненным в виде двух дросселей (не обозначены) и пневма тических сопл 40 и 41, встречно установленных в камерах 34 и 35, жестко соединенных с распределителем 26 и разделенных распределителем 25, при
этом входные каналы 42 и 43 сопл 40 и 41 соединены с источником 31 питания, а междроссельные камеры 44 и 45, образованные дросселями и выходными каналами (не обозначены) сопл 40 и
41, - с полостями 29 и 30 преобразователя 2 давления.
Пневмогидравлический следящий привод работает следующим образом. При наличии управляющего входного
сигнала распределитель 26 распределительного элемента 21 перемещается относительно корпуса 14 пневмогидрав- лического уп13авляющего устройства 13, например, вправо. Вместе с плосКИМ пневматическим распределителем 26 переместятся вправо,жестко связанные сопла 40 и 4I и подпружиненный пружинами 38 и 39 относительно плое
тями 27 и 28 плоского гидравлическо- го распределителя 25 (торцорые поверхности 27 и 28 рассматриваются как заслонки относительно, соответственно, пневматических сопл 40 и 41),
При этом воздух от источника 31 питания через проточки 19 и 23,поступает в полость 30 пневмоцилиндра 4 и во входные каналы 42 и 43 сопл 40 и 41 , полость 29 пневмоцилиндра 4
с атмосферой. Одновременно полость 6 гидроцилиндра 5 через проточки 22, 17 соединяется с полостью 11 исполнительного гидроцилиндра 1, Под дей- ствием перепада давления шток 3 пневмогидравлического преобразователя 2 давления перемещается влево и часть жидкости из полости 6 через проточки 22 и 7 вытесняется в полость 11 исполнительного гидроцилиндра 1 , Это приводит к смещению вправо выходного элемента 15 и часть жидкости из полости 12 исполнительного гидроцилиндра 1 вытесняется в по- лость 7 гидроцилиндра 5 пневмогид- равлического преобразователя 2 дав-, ЛЕНИН, При перемещении выходного элемента 15 вправо перемещается и жестк с ним связанный корпус 14, а этим восстанавливается исходное положение распределительного элемента 21 относительно корпуса 14. Движение штока 3 и выходного элемента 15 прекращается.
Таким образом в приводе осуществляется обработка управляющего сигнала.
Если выходной элемент 15 воспринимает возмущение, действующее, напри- мер, влево, то корпус 14 смещается влево относительно подпружиненного распределительного элемента 21, одновременно с этим изменяются давления в полостях 1 и 12 исполнительного гидроцилиндра 1 и связанных с ними соответственно внутренних камерах 36 и 37, Под давлением жидкости плоский гидравлический распределитель 25 смещается вправо. Зазор между пневмати- ческим соплом 41 и торцовой поверхностью 26 /уменьшается, а зазор пневматическим соплом 40 и торцовой поверхностью 27 увеличивается. Одновременно с этим полость 11 исполнительного гидроцилиндра 1 через проточки 17 и 22 соединяется с полостью 6 гидроцилиндра 5 пневмогидрали -еского преобразователя 2 давления, а также соединяется через, проточк 19 и 24 полость 29 пневмоцилиндра 4 с источником 31 питания. Вследствие увеличения давления в полости 29 по сравнению с полостью 30 за счет уве- личения давления в междроссельной полости 45 по сравнению с меяодрос
Составитель С, .цественский Редактор С, Патрушева Техред А.Кравчук Корректор Л, Бескид
Заказ 3033/31 . Тираж 639Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35э Раушская наб. д. 4/5
Производственно-полиграфическое предприятие г, Ужгород, ул. Проектная, 4
сельной полостью 44 и соединения полости 30 с источником 31 питания щток 3 пневмогидравлического преобразователя 2 давления перемещается влевоS часть идадкости из полости 6 гидроцилиндра 5 через проточки 22 и 16 вытесняется в полость 11 исполнительного гидроп.5линдра 1 . Благодаря этому выходной элемент 15 смещается вправо li возмущающий сигнал будет скомпенсирован,. Корпус 14 перемещается вправо 5 давления во внутренних управляюпщк камерах 36 и 37 восстанавливают первоначальные значения,. плоский гидравлический распределитель 25. перемещается в.пево и занимает исходное положение относительно сопл 40 и 41.
В результате исходное положение пневмогидравлнческого управляющего устройства 13 восстанавливается. Движение штока 3 и выходного элемента 15 прекращается. Таким образом в приводе ос тцествляется отработка и компенсация возмущающего воздействия.
Формула изобретения:
Пневмогидравлический следяшрй привод по авт, ев, № П88377, о т л и чающий с я тем, что, с целью улучшения динамических характеристик и повьш1ения точности; он снабжен корректирующим устройством, выполненным в виде двух дросселей и двух встречно установленных в управляющих камерах пневматических сопл, жестко соеди- ненных с пневматический распределителем и разделенных гидравлическим распределителем j, при этом входные каналы, сопл, соединены с источником питания, а образованные дросселями и выходными каналами сопл междроссельные каь5еры - с полостями пневмоци- ликдра пневмогидравлического преобразователя давления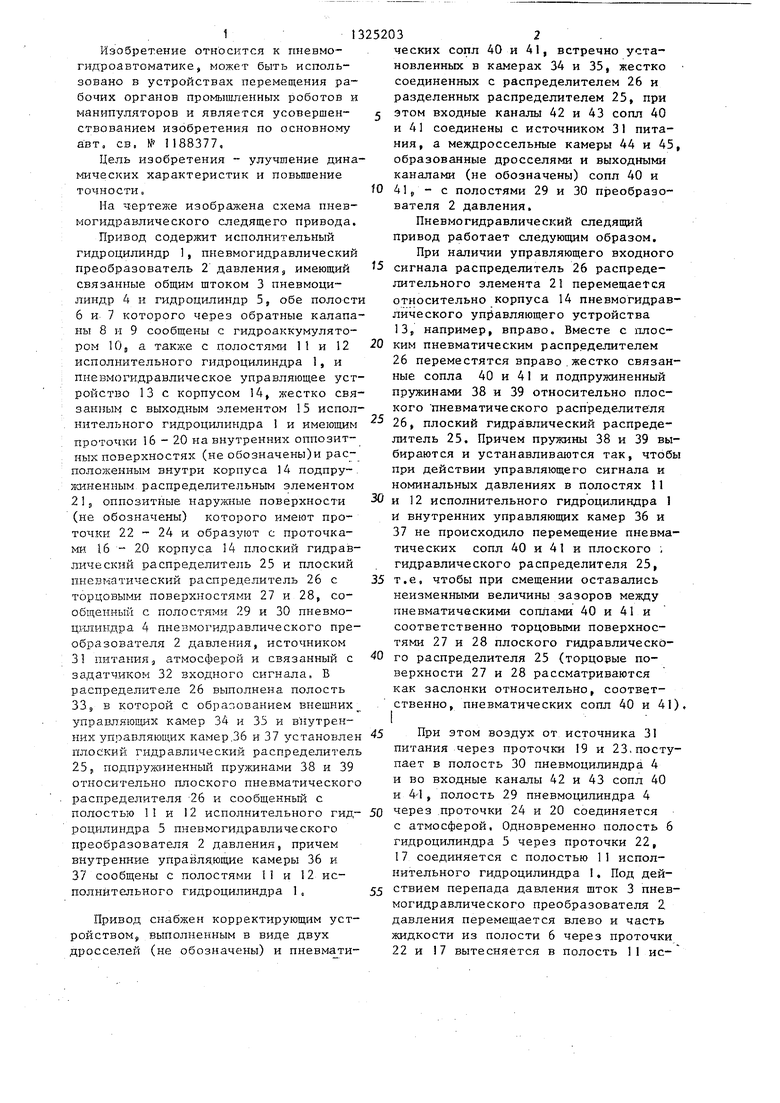
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический следящий привод | 1983 |
|
SU1198267A1 |
| Следящий привод | 1976 |
|
SU636423A1 |
| Активная пневмогидравлическая подвеска транспортного средства | 1985 |
|
SU1243964A1 |
| Пневмогидравлический следящий привод | 1987 |
|
SU1479713A1 |
| Прореживатель сахарной свеклы | 1988 |
|
SU1639447A1 |
| Пневмогидравлический следящий привод | 1982 |
|
SU1025924A1 |
| Прореживатель сахарной свеклы | 1987 |
|
SU1428224A1 |
| Пневмогидравлический цифровой привод | 1980 |
|
SU943445A1 |
| Пневмогидравлический следящийпРиВОд | 1978 |
|
SU802657A1 |
| Пневмогидравлический следящий привод | 1988 |
|
SU1562542A1 |
Изобретение может быть использовано в устройствах перемещения рабочих органов промышленных роботов и манипуляторов. Цель изобретения - улучшение динамических характеристик привода и повышение его точности. Для этого привод снабжен корректирующим устройством, содержащим два дросселя и два встречно установленных в управляющих камерах 34 и 35 пневматических сопла (С) 40 и 41, которые жестко соединены с распределителем 26 и разделены распределителем 25. Входные каналы 42 и 43 С 40 и 41 соединены с источником питания 31, а междроссельные камеры 44 и 45, образованные дросселями и выходными каналами С 40 и 41, - с полостями 29 и 30 преобразователя 2 давления. Привод осуществляет отработку управляющего сигнала и компенсацию возмущающего воздействия, 1 ил. Л и Г7 , я f г . СО tsD СП ГО О со ЗР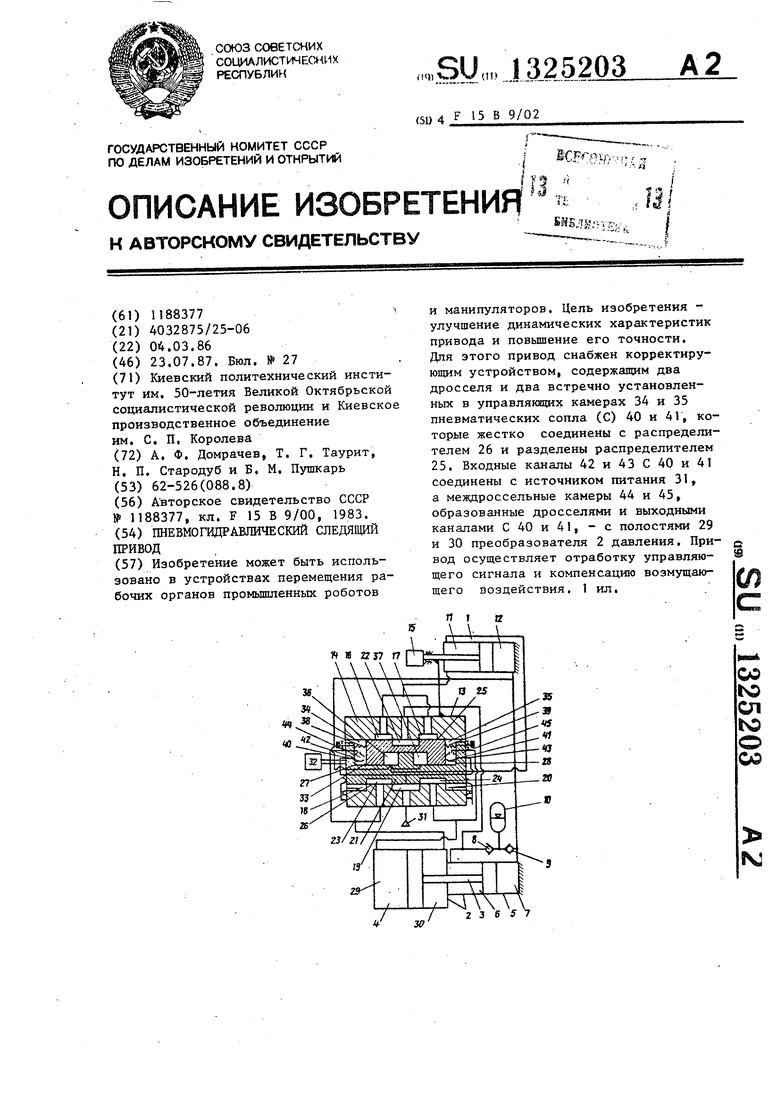
| А вторское свидетельство СССР № 1188377, кл | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
