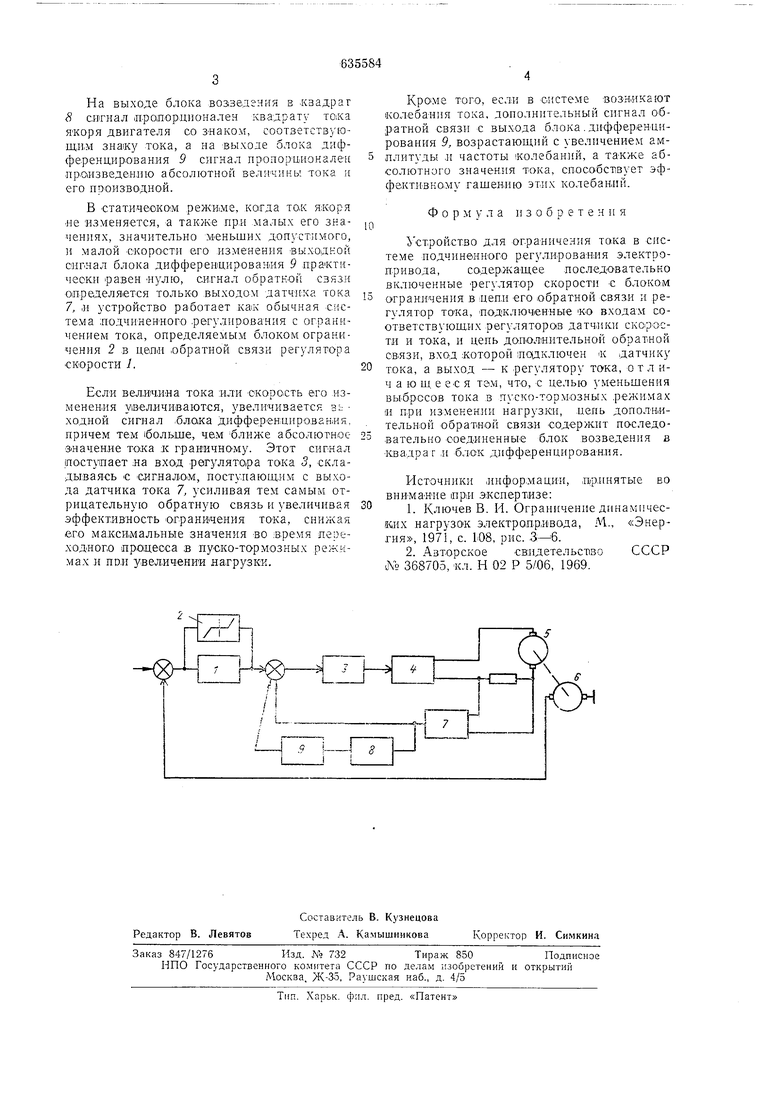
На выходе блока воазедения в .квадрат 8 сигнал пропорднонален квадрату roiKa акоря двигателя со знаком, соответствующим зна1ку тока, а на выходе блока дифференцирования 9 сигнал пропорД|Ионален произведению абсолютной тока и его производной.
В -статическом режиме, то,к я;коря -не изменяется, а также при малых его значениях, значительно м-еньших допустимого, и малой Скорости его изменения вых-одкой сигнал блока дифферепцирован-ия 9 практически равен нулю, сигнал обратной связи оиределяется только выходом датчи:ка тока 7, и устройство работает каа обычная система иодчиненного регулирования с ограничением тока, определяемым блоком ограничения 2 в цепа обратной связи регулятора Скорости /.
Если величина тока или -скорость его изменения увеличиваются, увеличивается вь ходной сигнал -бложа Дифферен:цировак:ия, причем тем (больше, чем блинке абсолютное значение тока ,к гранично-му. Этот сигнал поступает иа вход регулятора тока 5, складываЯСЬ с сигналом, поступающим с выхода датчика тока 7, усиливая тем самым отрицательную обратную связь и увеличивая эффективность ограничения тока, снижая его максимальные значения -во время переходного процесса :в пуско-тормозных режимах и пои уведич-ении нагрузки.
того, есл;И в -системе -возникают 1кол-ебания тока, дополнительный сигнал о бр-атной связи с выхода блока. диффер1ен-цирования 9, возрастающий с увеличением амплитуды и частоты колебаний, а та-кже абсолютного значения тока, способствует эффективному гашению этих колебаний.
Формула изобретения
Устройство для ограничения тока в системе подчиненного регулирования электропривода, содер-жащее последовательно включенные регулятор скорости -с блоком ограничения в депи -его обратной связи и регулятор тока, п-одключенные к-о входам соответствующих регуляторов датч-ики скор-ости и тока, и цепь доиолиительной обратной связи, вхо-д которой по(дключен к датчику тока, а выход - к регулятору така, от л ичающееся там, что, с целью уменьшения вы-бр-осов тока в пуско-торм-озных режимах и при изменении нагрузки, иепь допол-нительной обратной связи содержит последовательно соединенны-е блок возведения в квадрат и бл-ок дифференцирования.
Источники .ннфор.мации, ир.инятые во вни-ма-ние при экспертизе:
1.Ключев В. И. Ограничение динамических нагрузок электропривода, М., «Энергия, 1971, с. 108, рис. .
2.Авторское свидетельство СССР 368705, кл. Н 02 Р 5/06, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ограничения тока в системе подчиненного регулирования электропривода | 1978 |
|
SU765961A2 |
| Частотно-регулируемый электропривод | 1978 |
|
SU744886A1 |
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2068614C1 |
| Электропривод | 1980 |
|
SU955484A2 |
| Устройство для управления электроприводом постоянного тока | 1981 |
|
SU1025007A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
