(54) ЭЛЕКТРОПРИВОД

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1436265A2 |
| Электропривод | 1980 |
|
SU1059647A2 |
| Электропривод | 1983 |
|
SU1179511A1 |
| Способ управления двигателем двойного питания | 1987 |
|
SU1515326A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| Электропривод | 1983 |
|
SU1100702A2 |
| Электропривод | 1986 |
|
SU1385217A1 |
| Электропривод | 1976 |
|
SU649116A1 |
| Электропривод | 1979 |
|
SU855915A2 |
| Устройство управления пуском асинхронного двигателя | 2020 |
|
RU2737953C1 |
1
Изобретение относится к электротехнике и может быть использовано в системах точного электропривода переменного тока, построенных на фазовом принципе стабилизации скорости, а также в промышленных установках с низкими скоростями движения рабочего органа, требующих высоких динамических и повышенных энергетических показателей при широком диапазоне регулирования свидетельства.
По основному авт. св. № 649116 известен электропривод, содержащий машину двойного питания, одна обмотка которой подключена к преобразователю регулируемой частоты, управляемому от задающего генератора и схемы управления, включающей корректирующее устройство и фазовый детектор, другая обмотка подсоединена к источнику возбуждения, а третья обмотка является измерительной и размещена в рабочем зазоре мащины, сумматор, входы которого подключены к измерительной обмотке и датчику тока возбуждения машины, а выход сумматора соединен с входом фазового детектора, при этом измерительная обмотка дополнительно соединена с другим входом фазового детектора 1j.
Недостатком этого электропривода является наличие двух характерных режимов работы. Основной режим (синхронизм в «малом) наблюдается в системе при незначительных колебаниях угла нагрузки около
5 установившегося значения, т. е. когда эти колебания не выходят за пределы линейного участка характеристики фазового детектора. Неосновной режим (режим биений или синхронизм « в большом) возникает при
,Q приеме или сбросе нагрузки, изменении режима работы и т. д. В этом случае колебания угла нагрузки выходят за пределы линейного участка характеристики фазового детектора и фазовый контур регулирования в этом случае является обратной связью,
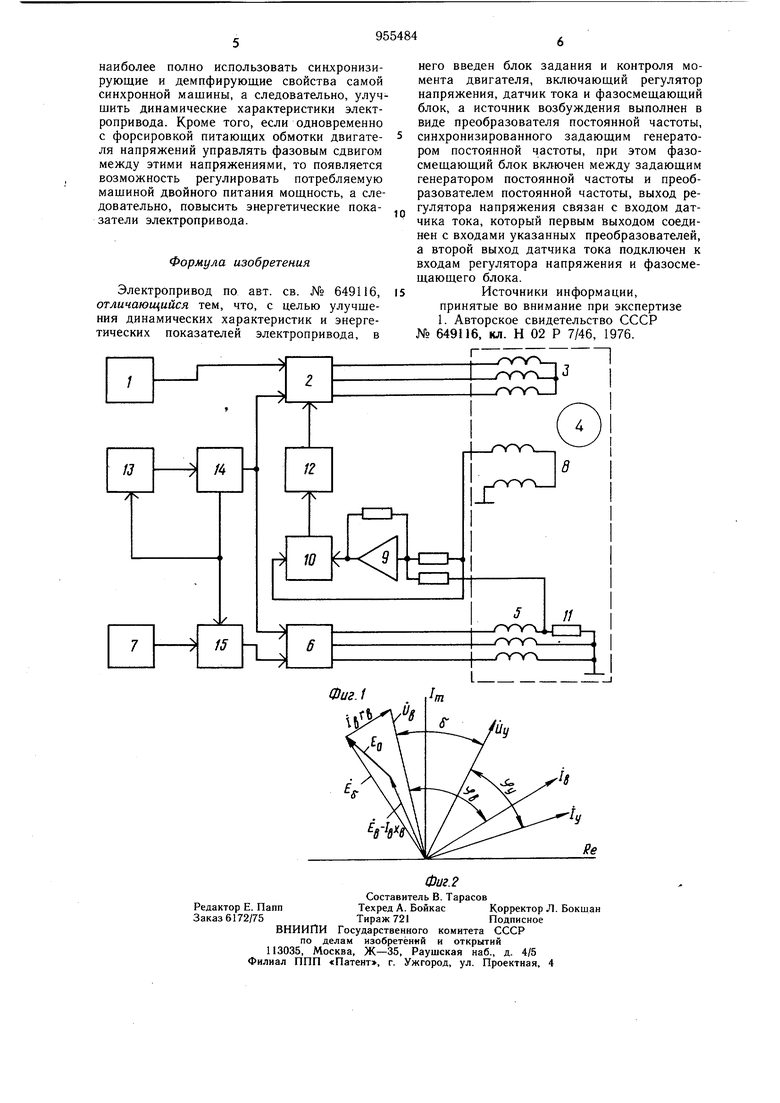
15 в цепь которой включена периодическая нелинейность. Это вызвано тем, что фазовый детектор работает как линейный элемент только в ограниченной зоне текущего неравенства фаз сравниваемых частот. Поэто2Q му режим биений, возникающий при переходных режимах, во многом определяет работоспособность данного фазоимпульсного электропривода, который характеризуется полосой захвата и удержания в синхронизме. Характерной особенностью данной системы электропривода является также то, что сама машина двойного питания является системой с периодической нелинейностью, выраженной зависимостью между электромагнитным моментом и углом нагрузки. Эта зависимость является внутренним фазовым детектором любой синхронной машины. Существенным недостатком такой системы синхронизации является отсутствие возможности подстройки начальной рабочей точки фазового детектора. Начальная расстройка внутреннего фазового детектора (самой машины) зависит от начальной величины нагрузки на валу машины. Поэтому, использовать полностью свойства фазового детектора и полосу захвата самой машины не удается, а следовательно, не удается получить высокие динамические характеристики электропривода. Кроме того, при измерении режимов работы электропривода с машиной двойного питания происходит изменение его энергетических показателей, что является в ряде случаев нежелательным. Цель изобретения - улучшение динамических характеристик и энергетических показателей электропривода. Поставленная цель достигается тем, что в электропривод дополнительно введен блок задания и контроля момента двигателя, включаюш,ий регулятор напряжения, датчик тока и фазосмещаюш,ий блок, а источник возбуждения выполнен в виде преобразователя постоянной частоты, синхронизированного задающим генератором постоянной частоты, при этом фазосмещающий блок включен между задающим генератором постоянной частоты и преобразователем постоянной частоты, выход регулятора напряжения связан с входом датчика тока,который первым выходом соединен с входами преобразователей, а второй выход датчика тока подключен к входам регулятора напряжения и фазосмещающего блока. На фиг. 1 изображена функциональная схема электропривода; на фиг. 2 - векторная диаграмма напряжений машины. Электропривод состоит из задающего генератора 1 регулируемой частоты, подключенного к преобразователю 2 регулируемой частоты. Преобразователь 2 соединен с обмоткой 3 управления синхронного двигателя двойного питания с ротором 4. Обмотка 5 возбуждения двигателя подключена к преобразователю 6 постоянной частоты, который синхронизируется задающим генератором 7 постоянной частоты. Двигатель двоиного питания снабжен измерительной обмоткой 8 с числом пар полюсов, равным числу пар полюсов обмотки 5. Выход обмотки 8 соединен с входами сумматора 9 и фазового детектора 10. Другой вход сумматора подключен к резистору 11 в цепи обмотки 5, а выход сумматора - к входу фазового детектора 10. Выход фазового детектора 10 соединен с входом корректирующего блока 12 схемы управления преобразователем 2. Выход регулятора 13 напряжения соединен с входом датчика 14 тока, первый выход которого подключен к входам преобразователей регулируемой и постоянной частоты, а второй выход датчика тока соединен с входами регулятора 13 напряжения и фазосмещающего блока 15,включенного между задающим генератором 7 и преобразователем 6 постоянной частоты, регулятор 13, датчик 14 тока и фазосмещающий блок 15 образуют блок задания и контроля момента двигателя. Постоянный ток, потребляемый от регулятора напряжения преобразователями, пропорционален моменту на валу двигателя, что позволяет осуществить обратную связь по этому параметру электропривода при косвенном способе его измерения и обеспечить постоянство перегрузочной способности двигателя в статистических и динамических режимах. Электропривод работает следующим образом. При колебаниях момента нагрузки изменяется и ток, потребляемый преобразователями частоты от регулятора 13 напряжения. Сигнал, пропорциональный этому току, снимаемый с датчика 14 тока, поступает на входы обратных связей регулятора 13 напряжения и фазосмещающего блока 15, осуществляя положительную обратную связь по моменту нагрузки с воздействием на напряжения питания обмотки и отрицательную обратную связь с воздействие.м на фазовый сдвиг между этими напряжениями - угол 6 (фиг. 2). При увеличении момента нагрузки возрастает ток, потребляемый преобразователями, но за счет положительной обратной связи увеличивается и питающее напряжение обмоток. В результате увеличивается электромагнитный момент двигателя, сохраняя постоянной его перегрузочную способность. Одновременно изменяется фазовый сдвиг между напряжениями питания, что позволяет, согласно фиг. 2, регулировать и стабилизировать потребляемую двигателем мощность и тем самым улучшить энергетические показатели. В итоге это дает возможность существенно (на 30-40%, а при тщательной настройке и в 1,5-2 раза) расширить область допустимых расстроек по моменту нагрузки, улучшает качество переходных процессов при пуске, реверсе, набросе нагрузки и придает данному фазоимпульсному электроприводу свойство электроприводов с частотно-токовым управлением. Такое устройство электропривода позволяет контролировать и задавать требуемое значение электромагнитного момента двигателя, что обеспечит более рациональный выбор исходной рабочей точки на статической угловой характеристике двигателя и
