мента сравнения подключен к первому входу синхронизации, второй вход которого соединен е первым выходом реверсивного счетчика, первый вход которого подключен ко второму выходу блока синхронизации, а второй выход - к третьему входу блока памяти, первый выход блока памяти соединен со вторым входом реверсивного счетчика, а второй выход - со вторым входом экстраполятора, третий вход которого подключен к третьему выходу блока синхронизации.
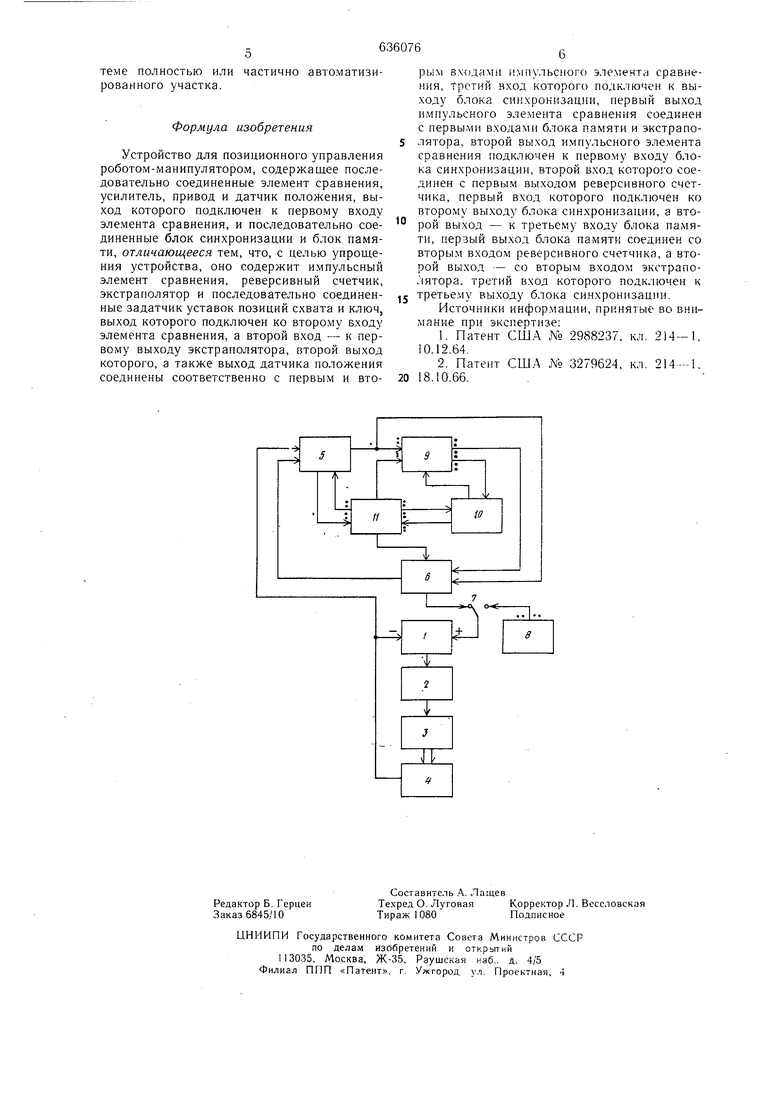
На чертеже изображена функциональная схема устройства для позиционного управления роботом-манипулятором.
Функциональная схема содержит элемент сравнения, усилитель 2, привод 3, датчик 4 положения, импульсный элемент 5 сравнения; экстраполятор 6, ключ 7, задатчик 8 уставок позиций схвата, блок 9 памяти, реверсивный счетчик 10, блок 11 синхронизации.
Устройство работает следующим образом.
На этане обучения ключ 7 подключает задатчик 8 уставок позиций схвата, например копир, к суммирующему входу элемента 1 сравнения соответствующей степени под-вижности. Реверсивный счетчик 10 по каналу связи сигналом от блока И синхронизации переводится в режим суммирования.
В режиме обучения от блока 11 синхронизации на управляющий вход импульсного элемента 5 сравнения по каналу управления начинают поступать тактовые управляющие импульсы. Информационный сигнал с выхода датчика 4 положения при движении схвата (или копира) по обучае.мой траектории поступает непрерывно на информационный вход элемента 5 и считывается в моменты поступления, тактовых импульсов. На первых л тактах сигналы ноложения с информационного выхода элемента 5 последовательно поступают на вход блока 9 памяти по каждой из степеней подвижности, куда записываются по сигналу «запись, поступающе.му на вход управления блока 9 памяти от блока синхронизации 11. Эти же сигналы положения с информационного выхода элемента 5 поступают на информационный вход блока 6, где хранятся для формирования экстраполир.ующей траектории. На (п + 1)-м тактовом импульсе элемент 5 произведет сравнение информационного сигнала от датчика и информационного сигнала сформированного экстраполятором 6 по поступившим на него ранее п информационным сигналам. Если разность этих двух сигналов по .модулю не превышает заданную величину, то с логического выхода эле.мента 5 на вход блока 11 синхронизации поступит сигнал, определяющий последующую работу устройства. На реверсивный счетчик 10 поканалу управления от блока 11 синхронизации поступит импульс, который запищет в него единицу. По си -налу управления в экстраполятор 6 будет записана информация о положении на (п + 1)-м такте с информационного выхода элемента 5 для последующего экстраполирования траектории. Ес.1и на следующе.м такте сигнал на логическом, выходе элемента 5 не изменился, то работа схемы повторится, т.е. в реверсивный счетчик 10 добавится еще одна единица и т.д. Устройство будет функционировать описанным образом, пока не изменится сигнал
на логическом выходе эле.мента о.
Пусть на некотором такте результат сравнения двух сигналов на входах элемента 5 изменился. Это вызовет изменение сигнала
, на входе блока синхронизации 11, на управляющий вход блока 9 памяти по каналу управления поступит сигнал «запись. Содержимое реверсивного счетчика 10 перепищется в блок 9 памяти, туда же, а также в экстраполятор 6 с информационного выхода элемента 5 запищется информация о положении на данном такте. Реверсивный счетчик 10 обнулится сигналом от блока 11 синхронизации, поступаюцлим на управляющий вход реверсивного счетчика 10. В случае переполнения реверсивного счетчика 10 на
вход блока II синхронизации по каналу управления поступит сигнал переполнения, который вызовет аналогичные операции.
В рел-симе воспроизведения ключ 7 подключит выход экстраполятора 6 к суммирующему входу блока сравнения 1. Реверсивный счетчик 10 сигналом «реверс от блока 11 синхронизации по каналу управления переводится в режим вычитания. На первом такте воспроизведения по команде «считы вание, поступающей по каналу управления от блока 11 синхронизации, N первых запомненных при обучении точек переписываются в экстраполятор 6 из блока 9 памяти. Блок 6 формирует траекторию, которая отрабатывается на протяжении п тактов. На п-м так0 тоном и.мпульсе из блока памяти 9 в блок 6 будет переписана координата следую цей точки и в реверсивный счетчик 10 число пропущенных тактов -.между соседними запомненными точками. Экстраполятор 6 будет воспроизводить траекторию заданное число тактов, т.е. до обнуления счетчика О, содержимое которого на каждо.м такте уменьшается на 1. Обнуление реверсивного счетчика 10 вызовет появление сигнала на входе блока 11 синхронизации, который сформирует
Q сигнал обращения к блокх 9 памяти, обеспечит перепись координаты следующей точки из блока 9 памяти в блок 6, и передает новое число тактов экстраполяции в режиме обучения в реверсивный счетчик 10. Изобретение позволяет повысить точ5 ность программирования и существенно сэконо.мить время, необходимое для обучения или переобучения промышленного робота-манипулятора, работающего, скажем, в сиетеме полностью или частично автоматизирезанного участка. Формула изобретения Устройство для позиционного управления роботом-манипулятором, содержащее последовательно соединенные элемент сравнения, усилитель, привод и датчик положения, выход которого подключен к первому входу элемента сравнения, и последовательно соединенные блок синхронизации и блок памяти, отличающееся тем, что, с целью упрощения устройства, оно содержит импульсный элемент сравнения, реверсивный счетчик. экстраполятор и последовательно соединенные задатчик уставок позиции схвата и ключ, выход которого подключен ко второ.му входу элемента сравнения, а второй вход - к первому выходу экстраполятора, второй выход которого, а также выход датчика положения соединены соответственно с первым и вторым входами импульсного элемента сравнения, третий вход которого подключен к выходу блока синхронизации, первый выход импульсного элемента сравнения соединен с первыми входами блока памяти и экстраполятора, второй выход импульсного элемента сравнения подключен к первому входу блока синхронизации, второй вход которого соединен с первым выходом реверсивного счетчика, первый вход которого подключен ко второму выходу блока синхронизации, а второй выход - к третьему входу блока памяти, перзый выход блока памяти соединен со вторым входом реверсивного счетчика, а второй выход - со вторым входом экстраполятора. третий вход которого подключен к третьему выходу блока синхронизации. Источники информации, принятые во внимание при экспертизе: 1.Патент США № 2988237, кл. 214-1, 10.12.64. 2.Патент США jVg 3279624, кл. . 18.10.66.

| название | год | авторы | номер документа |
|---|---|---|---|
| Обучающее устройство | 1984 |
|
SU1249566A1 |
| Устройство для интегрирования | 1983 |
|
SU1108470A1 |
| Адаптивный экстраполятор | 1989 |
|
SU1652980A1 |
| Система регулирования параметров микроклимата | 1983 |
|
SU1158999A2 |
| Экстраполятор видеосигнала изображения | 1989 |
|
SU1718246A1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| Тренажер для обучения сварщиков | 1986 |
|
SU1441446A1 |
| Устройство для ретрансляции речевых сигналов | 1990 |
|
SU1830627A1 |
| Устройство для цифровой записи воспроизведения речевой информации | 1988 |
|
SU1573470A1 |
| Система автоматического контроля параметров электронных схем | 1989 |
|
SU1700538A1 |
