Изобретение относится к экскаваторостроению, а именно к конструкции рабочего оборудования мощного экскаватора-драглайна.
Известно рабочее оборудование экскаватора-драглайна, включающее ковш с подъемными цепями и разгрузочным блоком, состоящим из щкива и обоймы.
Такая конструкция рабочего оборудования не позволяет эффективно управлять углом наклона ковша I.
Известно также рабочее оборудование экскаватора-драглайна, включаюнхее ковш с подъемными цепями и разгрузочным блоком, состоящим из щкива и обой.Пз1, установленной с возможностью перемещения вдоль подъемных канатов посредством дополнительной лебедки с канатом и направляющих блоков 2.
Однако конструкция известного рабочего оборудования экскаватора-драглайна сложна, так как на экскаваторе необ.ходим монтаж дополнительной лебедки с канатом и дополнительных направляющи.х блоков.
Возможность же управления углом наклона KOBHia драглайна позволяет обеспечить
наиболее оптнма,11)Ный характер протекания основных операций его рабочего luiK.ia и тем са.мым резко повысить производительность экскаватора.
Цель изобретения ,- упронгение конструкции рабочего оборудования. .
Для достижения цели один из подъемных канатов закреплен на обойме разгру: очного шкива, а другой подьемпый канат пропущен через нее и связан с нод1 ем11ыми цепями.
Использование для но.дъема ковп1а нееко.мьких подъемных канатов приводит к тому, что в процессе ei-o подъема и опускания вс.тедствие неидентичности параметров механизмов приводов, а также са.мнх канатов происходит перераспределение нагрузки между ними. При этом возникает необходимость выравнивания натяжения подьемных канатов.
Поэтому все существующие конструкции подъемных лебедок для мощных драглайнов с несколькими нодъемны.ми канатами выполняются с муфтами, переключающимися с помощью пневмоцилиндров. Такие муфты
лают позыо/кпость передавать вра1леннс одному барабану лебедки незавиеимо от другого н тем самым изменять длину подъемных канатов относительно друга.
Таким образом, при наличии на экскасаторе-драглайне подъемной лебедки с многодвигательным приводом и несколькими подъемными канатами, длины которых могут задаваемо изменяться относительно друг друга, целесообразно часть этих канатов использовать в механизме наклона ковп1а для переменяения разгрузочного блока. Проведенные расчеты и результаты физического моделирования показали, что при этом часть подъемных канатов, которая перемещает разгрузочпый блок, при углах наклона ковша, близких к оптимальному значению, воспринимает (0,45-0,5) РК.Г веса груженого KOBnia и поэтому изменения сечения подъемных канатов не требуется.
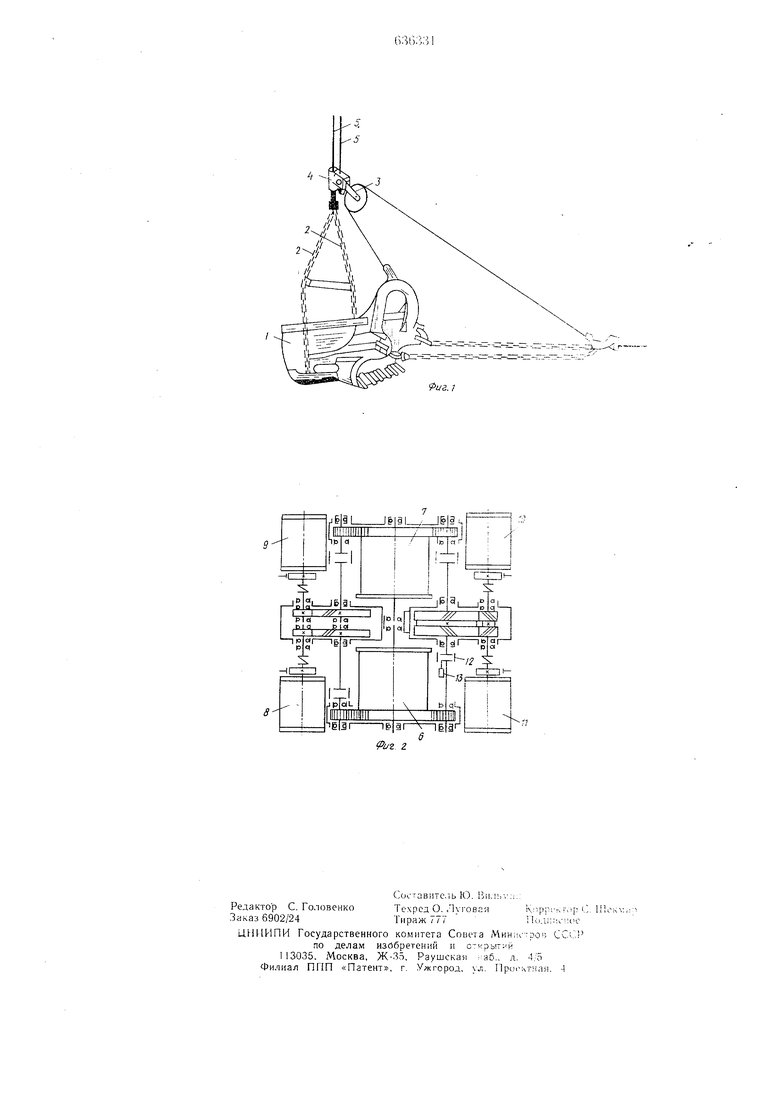
На фи1. 1 изображен ковп с разгрузочным блоком, имеюпдим возможность перемеилаться вдоль подъемных канатов; па фиг. 2кинематическая схема подъемной лебедки с четь1рьмя электродвигателями.
Рабочее оборудование мощного экскаватора-драглайна включает ковп 1 с подт емными цепями 2 и разгрузочным блоком со щкивом 3 н обоймой 4 и подъемные канаты 5.
Подъемная лебедка содержит правый и левый барабаны б и 7 соответственнс), электродвигатели 8, 9, 10, 11 и переключающую муфту 12 с ппевмоцилиндром 13.
Обойма 4 разгрузочного шкива 3 установлена с возможностью перемещения вдоль одъемных канатов 5, один из которых закреплен на обойме 4 разгрузочного шкива 3, а другой связан с подъемными цепями 2 ковша 1 и взаимодействует с обоймой 4 разгрузочного шкива 3.
В процессе работы экскаватора-драглайна при необходимости изменить уг-ол лаклона л,нип1а ковша 1 с помощью пневмоцп.чин4
дра 13 приводится в действие нереключаюHiasi .1у(рта 12, которая отключает правый барабан () от промежуточного вала шевронnoio редуктора. При этом электродвигатели 9, 10, и 11 вращают левый барабан 7, а электродвигатель 8 - только правый барабан. Поэтому машинист, регулируя скорость электродвигателя 8, изменяет число оборотов правого барабапа подъемной лебедки относптельно левого барабана и тем ca.vuiiM с помощью подъемного каната, закрепленного на обойме 4 разгрузочного пгкива 3, перемещает разгрузочный блок вдоль подъемных канатов. Это обеспечивает управ ление углом наклона KOBHja.
Предлагаемое рабочее оборудование мощного экскаватора-драглайна значительно проще по конструкции, а также существенно повышает эксплуатационную падежность драг.лайпа.
Формула изобретения
Рабочее оборудование экекаватора-драглайна, включающее ковш с подъемными цепя.ми и разгрузочрп 1м блоко.м, состояши.м из шкива и обоймы, установленной с возможностью пере.мещения вдоль подъемных канатов посредством дополнительной лебедки с капатом и наиравляющих блоков, отличающееся тем, что, с целью упрощения конструкции, один из подъемных канатов закреплен на обойме разгрузочного шкива, а другой подъемный канат пропущен через нее и связан с подъемными цепями.
Источники информации, припятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 338595, кл. Е 02 F 3/48, 1972.
2.Заявка 2008648/29- 03, по которой принято решение о выдаче авгорско1о свидетельства.
fua.;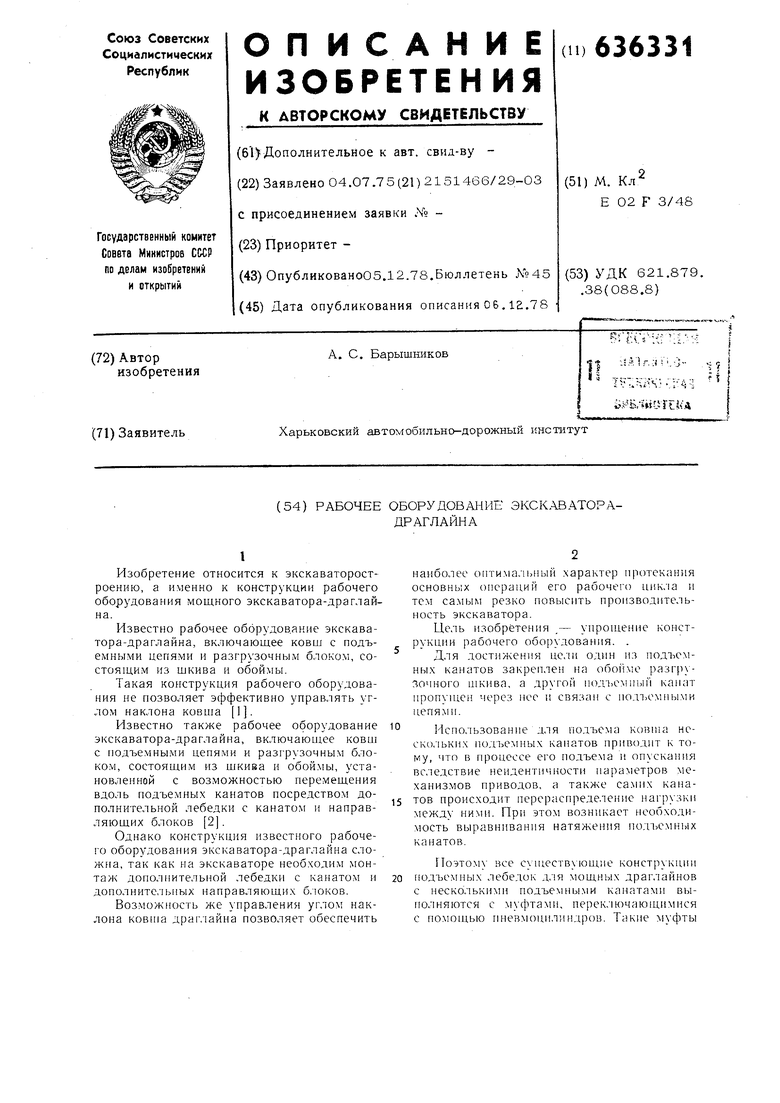
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование экскаватора-драглайна | 1982 |
|
SU1116124A1 |
| ЭКСКАВАТОР-ДРАГЛАЙН | 2000 |
|
RU2186909C1 |
| Рабочее оборудование экскаватора-драглайна | 1978 |
|
SU947299A1 |
| Рабочее оборудование экскаватора - драглайна | 1990 |
|
SU1788998A3 |
| Способ диагностики неисправностей ФАР | 1990 |
|
SU1800401A1 |
| Рабочее оборудование экскавато-PA-дРАглАйНА | 1979 |
|
SU810900A1 |
| Рабочее оборудование экскаваторадраглайна | 1976 |
|
SU605897A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ШАГАЮЩЕГО ЭКСКАВАТОРА | 1991 |
|
RU2007518C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ДРАГЛАЙНА ШАГАЮЩЕГО ПОГРУЗОЧНОГО | 1993 |
|
RU2090705C1 |
| Подвеска ковша экскаватора-драглайна | 1981 |
|
SU945294A1 |