Способ относится к области преобраэования формы представпения информации и может найти широкое применение в преобразоватепях типа вая - код, в которых датчиками угпа поворота вала являются синусно-косинусные вращакялиеся трансформаторы (СКОТ).
Известен способ преобразования угпа поворота вала в пропорциональный сигнал, основанный на преобразовании угла поворота СКВТ в пропорциональный ему угол сдвига фаз двух напряжений ij.
Известный способ не обеспечивает достаточной точности.
Наиболее близким техническим решением к данному изобретению является способ, преобразования угла поворота вала в пропорциональный сигнал, основанный на сравнении измеряемого сигнала с опорным, сформированным с более высокой частотой, чем максимальная частота измеряемого сигнала, и с фиксированной зависимостью во времени, идентичной измеряемому сигналу 2.
Для получения кода, пропорционального углу поворота валастрюбуемойточ- ностью, по известному способу формируют корректирующий код, который суммируют с кодом, полученным в результате сравнения сигналов огибающих СКВТ с опорным сигналом. С увеличением требуемой точности схема формирования корректирующего кода резко усложняется из-за необходимости формирования и хранения большого количества значений корректирующего кода. Таким образом, известный способ обладает недостаточной точностью.
Цель изобретения - повышение точности преобразования угла поворота в пропорциональный сигнал.
Поставленная цель достигается тем, что при сравнении измеряемого сигнала с опорным формируют временной интервал, началом которого является момент перехода опорного сигнала че|эез нулевое значение, а концом - момент равенства мгновенных значений измеряемого сигнала 363 и опорного. За истинный момент его конца принимают момент равенства измеряемого и опорного сигналов на участках, где производные этих сигнапов имеют оданаковый знак, преобразуют временной интервал в форму, удобную дпя суммирования, и получают пропорциональный сиг , путем суммирования преобразованного временного интервала с константами. Благодаря идентичности функциональных зависимостей сравниваемых сигналов
iot)HUo-U,sintwt
временной интервал, измеренный описанным вьаие способом, является пропорциоиаиьной величиной от. угпа поворота вала (ротора СКВТ) с высокой точностью.
Теоретически, при абсолютной идентичности функпионапьных зависимостей сравHHsaefvibix сигнаяов, погрешность преобрайования равняется нушо.
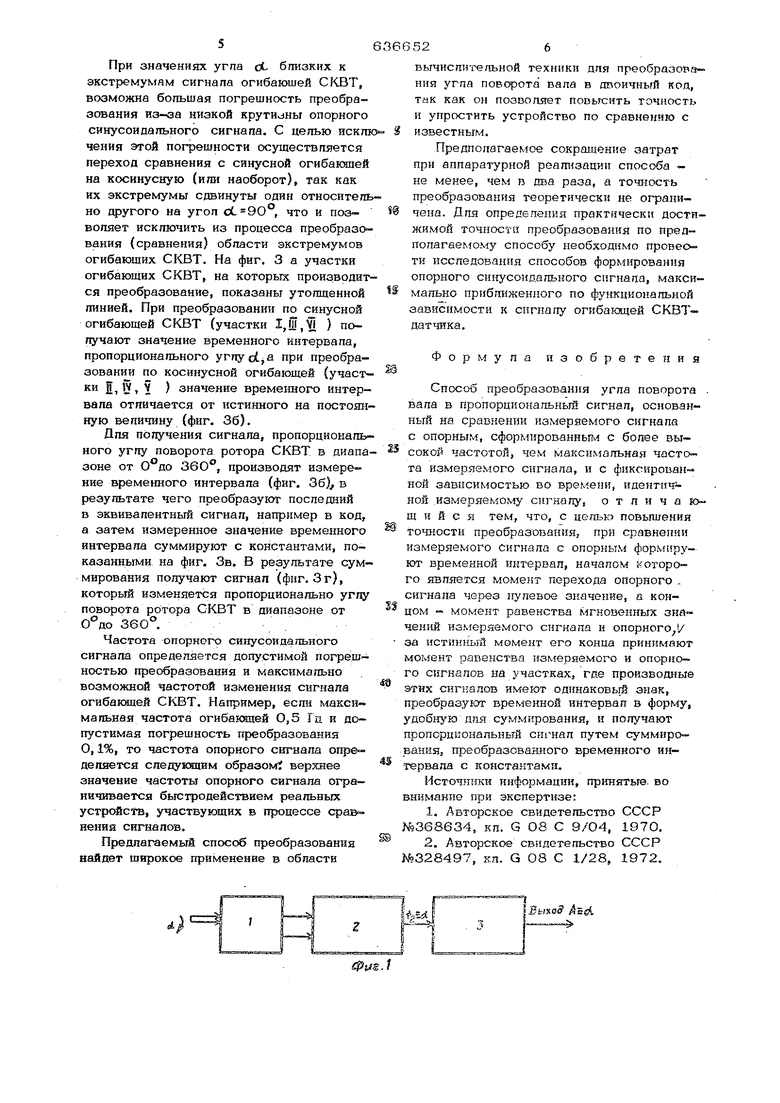
На фиг, 1 представлена блок--схема реашаации способа; на фиг. 2 и 3 временные диаграммы,
Бпок схема реапизаши способа преобразования угла поворота вапа в пропорциональный сигнап включает в себя СКВТ.- датчик 1, преобразователь 2 йапряжение временной интервап и измеритопь 3 .временного .интервала.
Преобразование осуществляется следуккцйм образом. ...
Выходные; С;Игнаш)1С КВТ. - датчика 1 постуяайт на;преобразоватапь 2 напряжение-времеИирзЭ интервал, где демодупируются и сравдив аютсй с о орными сану- соидапьным сигналом. В результате срав нения на выходе преобразователя 2 формируется временной интервал, пропорциональный угловому попожен1яю ротора СКВТдатчвка 1. .Измеритель 3 временного интервапа преобразует временной -интервал в эквивалентную физическую веяичнну другого рода, например, в напряжение иш в ДВОИЧНЫЙ код.
Сущность предпагаемого изобретения поясняется временными дааграммамй (фЕГ. .2), где показаны сравниваемые
опорный сигная Uo yfticsx огабавгадая синусной обмотки СКВТ-датчика 1 .,, где d-yron поворота ротора С КВТ-датчика Г,
Ш - угповаа частота опорного овнусондапьного сигнала.
iift.an.,,,
ct + tiKt „
COSго.если
2
откуда
1Г(2Н + Л-оС
Of
i
a.-Cfe;t
-О
jr(n;-))
если
откуда
(n + O
t
IJU
Выражение для i и tg являются математическим выражением временного интервала, началом которого является момент перехода через нулевое значение опорного сигнала , sin tjut а концом - момент равенства мгновенных значений опорного сигнала и сигнала огибак щей СКВТ. Из этих выражений видно, что зависимость (t) от угпа поворота ротора СКВТ ( dL ) является пропорциональной,- так как все члены правой части этих вьфажений, кроме сД., постоянны.
Неоднозначность временного интервала объясняется тем, что в каждом периоде опорного сигнала UQ существуют два момента равенства (фиг. 2).
Истинный значением временного интервала, который, изменяется пропорционально изменению угла cL , является временный интервал t так как при однозначно выбранном моменте начала временного интервала, например момент перехода опорного сигнала через нулевое значение из отрицательной области в положитетшную, второе значение временного интервала i, пропорционально не углу d , а величине
)-- Исходя из графической илгаострации предпагаемого способа, изображенной на , фиг. 2, истинным значением временного интервала (моментом конца временного 1нтервапа) является тот момент равенства, при котором производные сравниваемых сигналов имеют одинаковьй знак. в момент равенства сравниваемых налов выполняется условие n d. sin или sin ot,-siHtAji-О. Преобразуем это вьфажение dL- tftjt c -tfijt 22 Последнее вьфажение равняется нулю, oC+cut „. A-out cos 0илм sin--О, 22 При значениях угпа оС бтгазких к экстремумам сигнала огибаюшей , возможна большая погрешность преобразования из-за низкой крутисзны опорного синусоидального сигнала. С целью исклк чения этой погрешности осуществляется переход сравнения с синусной огибакнпей на косинусную {или наоборот), так как их экстремумы сдвинуты один относитего но другого на угол , что и поз- воллет искгаочить из процесса преобразования (сравнения) области экстремумов огибающих СКВТ. На фиг. 3 а участки огибающих СКВТ, на которых производит ся преобразование, показаны утолщенной линией. При преобразовании по синусной огибающей СКВТ (участки 1,Ш,1 ) получают значение временного интервала, пропорционального yrnyotja при преобразовании по косинусной огибающей (участ и Y ) значение време1шого интервала отличается от истинного на постоян ную величину (фиг. 36), Для получения сигнала, пропорционального углу поворота ротора СКВТ в диапа зоне от О°до 360, производят измерение временного интервала (фиг. Зб) в результате чего преобразуют последний в эквивалентный сигнал, например в код, а затем измеренное значение временного интервала суммируют с константами, показанными на фиг. Зв, В результате суммирования получают сигнал (фиг. Зг), который изменяется пропорционально угцу поворота ротора СКВТ в диапазоне от ЗбО. Частота опорного синусоидального сигнала определяется допустимой погрешностью преобразования и максимально возможной частотой изменения сигнала огибакицей СКВТ. Например, если максимальная частота огибающей 0,5 Гц и допустимая погрешность преобразования О,1%, то частота опорного сигнала определяется следующим образом верхнее значение частоты опорного сигнала ограничивается быстродействием реальных устройств, участвующих в процессе сравнении сигналов. Предлагаемый способ преобразования найдет широкое применение в области
SkKoS j4csi вычислительной техники дпя преобразования угпа поворота вала в двоичный код, так как он позвопяет повысить точность и упростить устройство по сравнению с известным. ,Предпопагае.тое сокращение затрат при аппаратурной реализации способа не менее, чем в два раза, а точность преобразования теоретически не ограничена. Для опредепешш практически достпжимой точности преобразования по предполагаемому способу необходимо провеоти исспедования способов формирования опорного синусоидапьного сигнала, максимально приближенного по функционагтьной зависимости к сппшлу огибакждей СКВТ- датчика. Формула изобретения Способ преобразования угла поворота . вала в пропорциональный сигнал, основанный на сравнении измеряемого сигнала с опорным, сформированньтм с бопее высокой частотой, чем макснмаггьная частота измеряемого сигнала, и с фиксированной зависимостью во времени, идентпчной .измеряемому сигналу, отличаюш и и с к тем, что, с цепью повьпиения точности преобразования, при сравнен51И измеряемого сигнала с опорным фop fI pyют временной интервап, началом которого является момент перехода опорного ,, сигнапа через нупевое значение, а концом - момент равенства мгновенных зна- измеряемого сигнапа и oпopнoгo / за истинный момент его конца принимают момент равенства из fepяeмoгo и опорного сигналов на участках, где производные этих сипгапов имеют одинаковьгй знак, преобразуют временной интервап в форму, удобную дпя суммирования, и получают пропорциональный сигнал путем суммирования, преобразованного временного интервала с константами. Источнгпси информации, принятые, во внимание при экспертизе: 1.Авторское свидетельство СССР 368634, кп. G О8 С 9/04, 1970. 2.Авторское свндетепьство СССР 9328497, кп. G 08 С 1/28, 1972.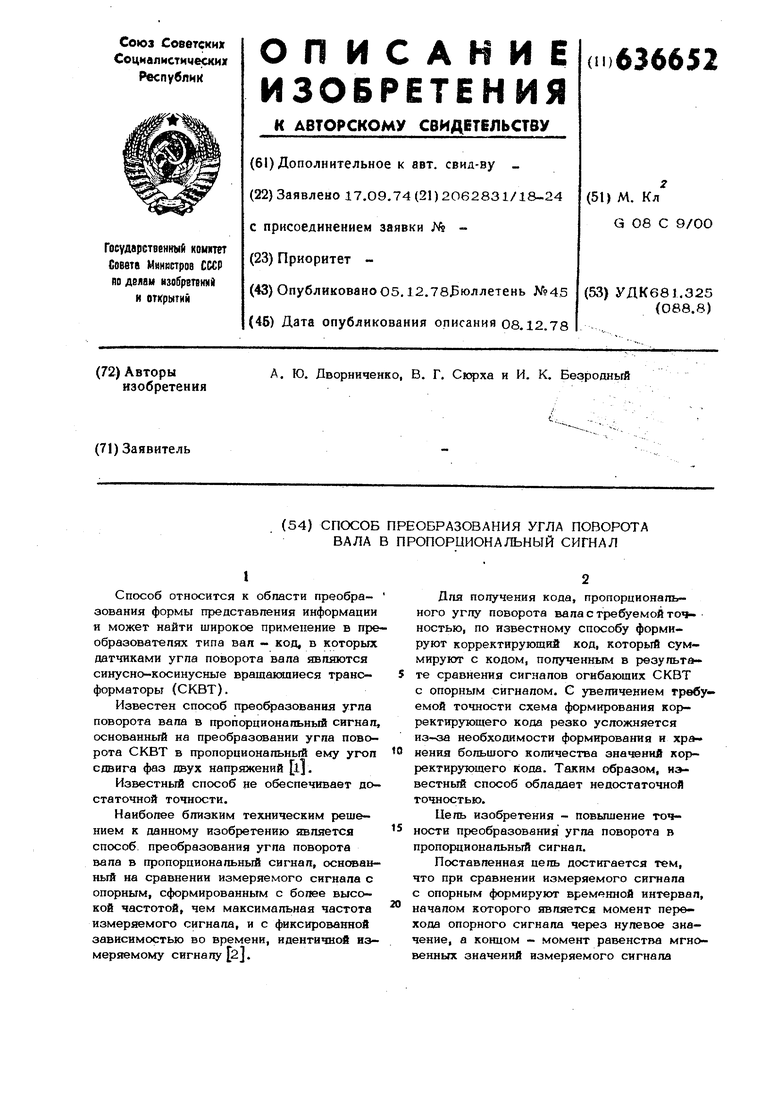
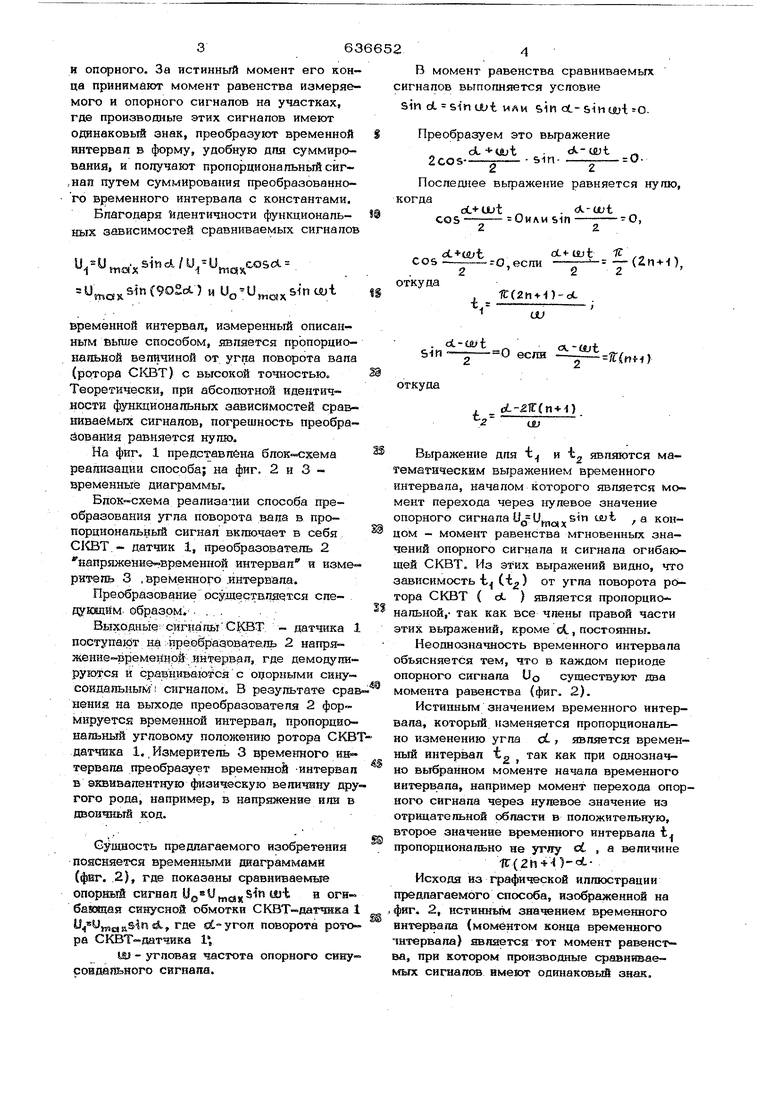
UifJmm-Cosoi. .и,-If,
7го°
.3
