Известна система имитации визуальной обстановки на транспортном тренажере, содержащая место обучаемого с органами управления и телеприемником, миниатюрполигон с макетом местности, над кoтopьт расположена передающая телекамера, соединенная с телеприемником, модепь машины и вычислительное устройство, связанное с приводами перемещения телекамеры и органами управления у..
Известная система не позволяет обучать вождению транспортного средства с взаимным учетом действий другого движущегося транспортного средства.
Цепью изобретения 5юляется расширение функциональных возможностей тренажера,
Зта ц;епь достигается тем, что система допопнительнр содержит вторые место обучаемого с органами управления и телеприемником, миниатюрполигон с макетом местности, над которым расположена передающая телекамера и модель машины с приводами их перемещения, вьтчислитепьное устройство, при этом приводы певой модели машины связаны с приводами дв1 жения второй телекамеры, приводы движения второй модели машины связаны с приводами движения первой телекамеры второй приемник соединен со второй телекамерой, а органы управления второго места обучаемого через второе вычислительное устройство связаны С приводами второй телекамеры.
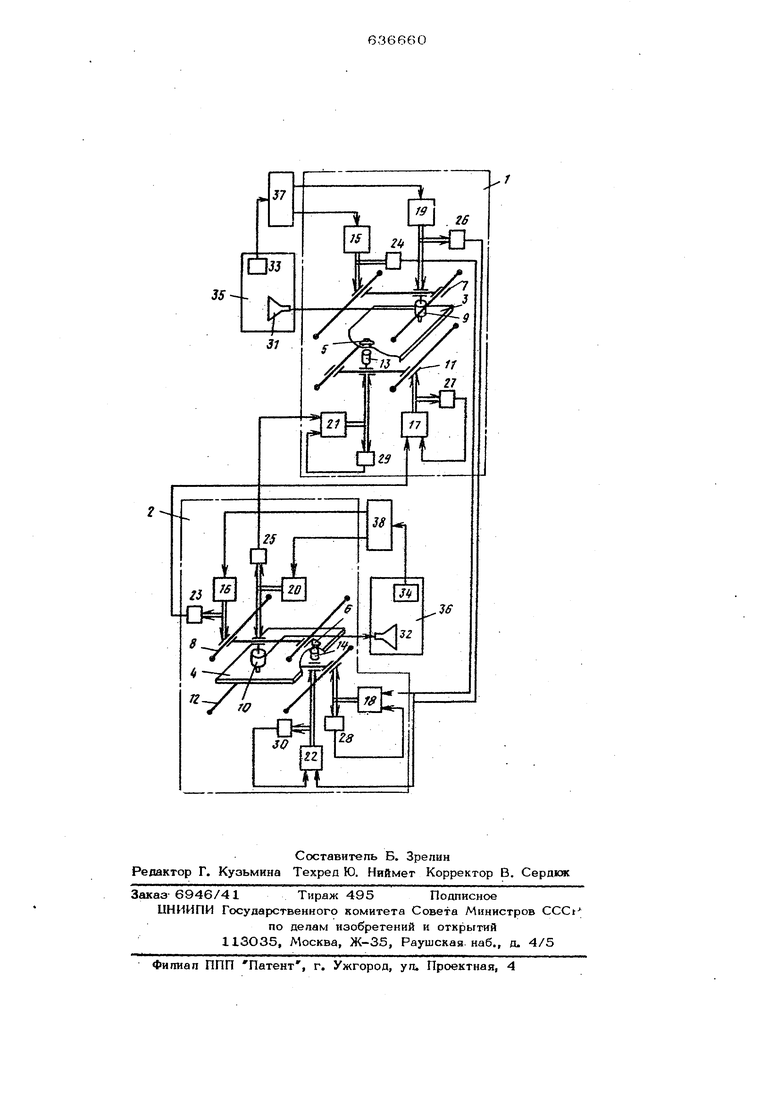
На чертеже изображена схема описываемой системы имитации визуальной обстановки.
Система имитации содержит два миниaTiopnomiroiia 1 и 2 с макетами 3 и 4. местности выполненные в одном масштабе и с одной информацией об участке изображ енной местности. На поверхности макета 3 помещена первая модель машины 5, а на поверхности макета 4 вторая модель машины 6,
Модели машины 5 и 6 имеют в своей конструкций детали из ферромагнитного материапа. Над рабочими поверхностями
макетов местности распопожены двухкоординатные портальные системы 7 и 8, с которыми связаны передающие тепевизионные камеры 9 и 10. Под макетами распопожены двухкоординат пые портальные системы 11 и 12, с которыми связаны эпектромагниты 13 и 14 осу1Двствп5пощие магнитную связь с моделями машин 5 и 6 соответственно. Портальные системы 7,8,11Д2 имеют привопы продопьного 15-18 и поперечного 19-.22, перемещений соответственно. Датчики 2-26 положения кинематически CBJiэаны с выходными осями приводов 16, 15,2ОД9, а с выходными осями привоДОН 17, 18, 21,22 кинематически связань датчики обратной связи 27-30. Сиотема имитации оборудована телеприемниками 31 и 32., электрически связанными с телекамерами 9 и 10 и органами управления 33 и 34, расположенными на местах первого 35 и второго 36 обучаемого, а также вычислительными устройствами параметров движения первой 37 и второй 38 машины, имеющими связь с приводами 15, 19,16,20 и с органами управления 33 и 34 соответственно.
Система работает спегзуклеим образом. Обучаемый, находяшийся на рабочем месте, наблюдает за обстановкой по телеприемнику 31, и, воздействуя на органы управления 33 через вычислительное устройство 37 и приводы 15 и 19,. изменяет скорость и направление движения тегеевизионной камеры 9 в соответствии с маневром модели машины 5 и наблюдаемыми дорожными условиями. Одновременно приводы 18 к 22 миниатюрпопигона 2 получая сигналы от датчиков 24 и 26, перемещают электромагнит 14 и модель машины 6 в положение, соответствующее положению телевизионной камеры 9. Обучаемый, находяшийся на рабочем месте наблюдает за обстановкой по телеприемнику 32 и, воздействуя на органы управления 34, через вычислительное устройство 38 и приводы 16 и , изменяет
скорость и направление движения телекамеры 10 в соответствии с маневром модели машины 6 и дорожными условиями.
При этом приводы 17 и 21 миниатюр- полигона 1, получая сигналы от датчиков 23 и 25, перемещают электромагнит 13 и модель машины 5 в положение, соответствующее положению телекамеры 1О.
Таким образом, оба обучаемых совершают активное B3aHv,Hoe маневрирование.
Формула изобретения
Система имитации визуальной обстановки на транспортном тренажере, содержаща место обучаемого с органами управления и телеприемником, миниатюрполигон с макетом местности, над которым расположёна передающая телекамера, соединенная с телеприемником, модель машины и вычислительное устройство, св51занное с приводами перемещения телекамеры органами управления, отличающаяс я тем, что, с целью расширения функциональных возможностей, система дополнительно содержит вторые место обучаемого с органами управления и телеприемником, миниатюрполигон с макетом местности, над которым расположена передающая телекамера и модель машины с приводами их перемещения, вычислительное устройство, при этом приводы первой модели машины связаны с приводами движения второй телекамеры, привош 1 движения второй модели машины связаны с приводами движения первой теттекамеры, второй приемник соединен со второй телекамерой, а органы управления второго места обучаемого через второе вычислительное устройство связаны с приводами второй Телекамеры.
Источники информации, принятые во внимание при экспертизе:
1, Патент Англии №1О00991, кп. В 7 Н, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер транспортного средства | 1981 |
|
SU1054829A1 |
| Имитатор визуальной обстановки на тренажере оперторов транспортных средств | 1987 |
|
SU1416650A1 |
| Тренажер транспортного средства | 1983 |
|
SU1141442A1 |
| Имитатор визуальной обстановки на тренажере операторов транспортных средств | 1976 |
|
SU613362A1 |
| Тренажер водителя транспортного средства | 1980 |
|
SU938298A1 |
| Тренажер транспортного средства | 1977 |
|
SU720471A1 |
| Устройство имитации визуальной обстановки тренажера оператора транспортного средства | 1981 |
|
SU1010641A1 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| Устройство имитации условий движения транспортного средства для тренажера | 1984 |
|
SU1401503A1 |
| Имитатор визуальной обстановки тренажера транспортного средства | 1985 |
|
SU1282188A1 |